技术特征:
1.一种用于检测具有机载用户设备(ue)的无人机(uav)的方法,所述方法由所述用户设备(ue)所连接到的基站(gnb)实现,所述方法包括以下步骤:-从所述基站(gnb)的多个接收波束(r)中确定接收波束(r),通过该接收波束(r)接收由所述用户设备(ue)发送的至少一个控制信号(s
pilot
),-根据通过所述确定的接收波束(r)接收的所述至少一个控制信号(s
pilot
)所确定的至少一个参数,来检测所述无人机(uav)。2.根据权利要求1所述的用于检测无人机的方法,其中,所述参数包括代表所述无人机产生的振动的多个功率谱密度值。3.根据权利要求1或2所述的用于检测无人机的方法,其中,所述至少一个参数包括根据与通过其接收所述至少一个控制信号的接收波束相关联的仰角的值所确定的所述用户设备的海拔高度,并且其中当所述用户设备的海拔高度大于或等于检测阈值时,检测到所述无人机。4.根据权利要求2所述的用于检测无人机的方法,其中,当所述用户设备的海拔高度低于检测阈值时,检测到所述无人机。5.根据权利要求3所述的用于检测无人机的方法,其中,所述用户设备的海拔高度是根据以下参数中的至少一个来确定的:-所述基站与所述用户设备分开的距离,-所述至少一个控制信号的接收功率,-信号传播损耗定律。6.根据前述权利要求中任一项所述的用于检测无人机的方法,还包括向网络的管理实体发送消息的步骤,所述消息包括无人机的海拔高度和/或在接收到的所述至少一个控制信号的频率响应中检测到表示由无人机产生的振动的多个功率谱密度值的指示。7.根据权利要求1所述的用于检测无人机的方法,其中,从所述基站的多个接收波束中确定通过其接收至少一个控制信号的接收波束的所述步骤包括:-为至少一个接收波束确定通过所述波束接收的所述控制信号的接收功率值:其中w
(r)
表示所述控制信号的接收功率值,是表示接收波束的维数为n
×
1的行向量;是表示所述基站和所述用户设备之间建立的传输信道的估计的维数为1
×
n的列向量,n是所述基站的接收天线的数量,并且r∈{1,
……
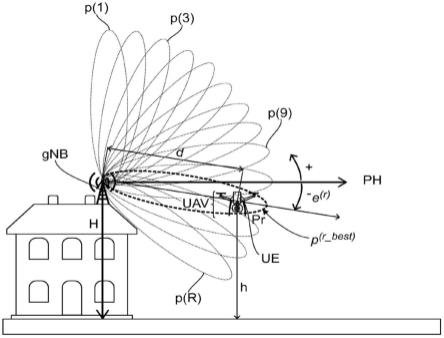
,r},其中r是所述基站的接收波束的数量,-确定所述至少一个控制信号的接收功率值大于为其他接收波束确定的所述至少一个控制信号的接收功率值的接收波束。8.根据权利要求6所述的用于检测无人机的方法,其中,所述用户设备的海拔高度确定如下:
其中,h是用户设备的海拔高度,h是基站的海拔高度,是接收波束的仰角,所述接收波束的至少一个控制信号的接收功率的值大于为其他接收波束确定的所述至少一个控制信号的接收功率的值,d为基站与用户设备之间的距离。9.一种用于在网络的管理实体和嵌入在无人机中的用户设备之间进行通信的方法,所述方法由所述网络的管理实体实施,包括以下步骤:-接收从所述用户设备所附接到的基站发送的消息,所述消息包括所述无人机的海拔高度和/或在由所述用户设备发送的并由所述基站接收的至少一个控制信号的频率响应中检测到由所述无人机产生的振动的指示,-当确定检测到的海拔高度和/或振动对应于无人机时,向用户设备发送请求其将自己识别为无人机的消息。10.根据权利要求8所述的用于在网络的管理实体与嵌入在无人机中的用户设备之间进行通信的方法,包括:当所述用户设备不将自己识别为无人机时,中断通过所述基站在所述用户设备与通信网络的设备之间建立的通信会话的步骤。11.一种基站(gnb),其能够检测具有机载用户设备(ue)的无人机(uav),所述用户设备(ue)附接到所述基站(gnb),所述基站(gnb)包括用于以下的部件:-从所述基站(gnb)的多个接收波束(r)中确定接收波束(r),通过所述接收波束(r)接收由所述用户设备(ue)发送的至少一个控制信号(s
pilot
),-根据通过所述确定的接收波束(r)接收的所述至少一个控制信号(s
pilot
)所确定的至少一个参数,来检测所述无人机(uav)。12.根据权利要求10所述的能够检测具有嵌入到连接到所述基站的用户设备的无人机的基站,还包括用于向网络的管理实体发送消息的部件,所述消息包括无人机的海拔高度和/或在接收到的所述至少一个控制信号的频率响应中检测到表示由无人机产生的振动的多个功率谱密度值的指示。13.一种能够与嵌入在无人机(uav)中的用户设备(ue)进行通信的网络的管理实体(amf),所述网络的管理实体(amf)包括用于以下的部件:-接收从用户设备(ue)所连接到的基站(gnb)发送的消息,所述消息包括无人机的海拔高度(h)和/或在由用户设备(ue)发送的并由基站(gnb)接收的至少一个控制信号的频率响应中检测到由无人机产生的振动的指示,-当确定检测到的海拔高度(h)和/或振动对应于无人机(uav)时,向用户设备(ue)发送请求其将自己识别为无人机(uav)的消息。14.根据权利要求8所述的能够与嵌入在无人机中的用户设备进行通信的网络的管理实体,包括当所述用户设备不将自身识别为无人机时,用于实现通过所述基站在所述用户设备与通信网络的设备之间建立的通信会话的中断的部件。15.一种计算机程序产品,包括用于在由处理器执行时实现根据权利要求1所述的方法的程序代码指令。16.一种计算机程序产品,包括用于在由处理器执行时实现根据权利要求8所述的方法的程序代码指令。
技术总结
本发明涉及无人机的检测。由于高于基站的天线飞行的无人机的机载用户设备生成的干扰,所以无人机对蜂窝通信网络的使用可引起问题。电信运营商能够控制无人机对蜂窝通信网络的使用是很重要的。存在允许检测无人机的方法。尽管这些方法允许确定无人机的位置,但是它们不提供令人满意的检测精度。同样,它们不允许在类似位置上的两个无人机之间进行区分。本发明基于其特性已知的控制信号的使用,并基于在基站和用户设备之间设立的传输信道的已知属性的使用,以确定精确和可靠的海拔高度值。以确定精确和可靠的海拔高度值。以确定精确和可靠的海拔高度值。
技术研发人员:A.木科特 D.T.潘胡伊
受保护的技术使用者:奥兰治
技术研发日:2021.03.22
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。