1.本发明涉及作业机械的定位系统、作业机械及作业机械的定位方法。
背景技术:
2.近年来,在液压挖掘机等作业机械中,对ict(信息与通信技术:information and communication technology)的运用进行推进。例如,已知有如下的作业机械等,其搭载gnss(全球导航卫星系统:global navigation satellite systems)等以检测作业机的位置,并将作业机的位置信息与表示作业现场的现状地形的现状地形数据进行比较,从而通过运算处理而求得作业机的位置或姿态等(例如,参见专利文献1)。
3.专利文献1:日本特开2014-205955号公报
技术实现要素:
4.在作业机械中,在进行使用gnss的实时动态(rtk:realtime kinematic)定位(以下,称作“rtk定位”)的情况下,需要进行初始化处理。然而,在固定站与移动台之间的距离较长,或者,移动台的周边存在障碍物等情况下,存在无法将推算并确定各卫星的整数偏差(integer value bias)的计算收敛,从而初始化处理一直不完成的情况。
5.所公开的技术是鉴于上述问题而提出的,其目的在于提供一种能够在使用了gnss的rtk定位中,适当地执行初始化处理的作业机械的定位系统、作业机械及作业机械的定位方法。
6.本发明提供一种使用了实时动态定位的作业机械的定位系统,所述实时动态定位使用卫星定位系统,所述作业机械的定位系统具备:计算部,其基于所述作业机械的作业机的位置,计算配置于所述作业机械的卫星定位系统的天线的位置,所述作业机与作业现场中已定位的已知的基准点位置重合;以及初始化控制部,其向通过实时动态定位来进行定位计算的卫星定位系统的接收机输出控制指令,所述控制指令用于使所述接收机使用所述计算部计算出的所述卫星定位系统的天线的位置,来执行将各卫星的整数偏差与所述卫星定位系统的天线的位置作为未知数的、定位计算的初始化处理。
7.根据本发明的形态,能够在使用了gnss的rtk定位中,适当地执行初始化处理。
附图说明
8.图1是表示本实施方式涉及的作业机械的立体图。
9.图2是表示本实施方式涉及的作业机械的驾驶室的图。
10.图3是用于说明作业机械的定位的图。
11.图4是表示本实施方式涉及的作业机械的定位系统的示意图。
12.图5是表示本实施方式涉及的作业机械的定位系统的一个示例的框图。
13.图6是表示本实施方式涉及的计算机系统的框图。
14.图7是表示本实施方式涉及的作业机械的定位方法的一个示例的流程图。
具体实施方式
15.下面,基于附图对本发明涉及的作业机械的定位系统、作业机械及作业机械的定位方法的实施方式进行说明。此外,本发明不限于该实施方式。另外,下述实施方式中的结构要素中包含本领域技术人员能够轻易置换的要素,或者实质上相同的要素。
16.图1是表示本实施方式涉及的作业机械1的立体图。在本实施方式中,设作业机械1为液压挖掘机。在以下的说明中,可将作业机械1称作液压挖掘机1。液压挖掘机1包括:下部行走体2、由下部行走体2所支承的上部回转体3、由上部回转体3所支承的作业机4、以及用于驱动作业机4的液压缸5。
17.下部行走体2能够以支承着上部回转体3的状态行走。下部行走体2具有一对履带。下部行走体2通过履带的旋转而行走。
18.上部回转体3能够以支承于下部行走体2的状态,相对于下部行走体2以回转轴rx为中心回转。上部回转体3具有供液压挖掘机1的驾驶员搭乘的驾驶室6。在驾驶室6中,设有供驾驶员就坐的驾驶座椅9。
19.作业机4包括:连结于上部回转体3的动臂4a、连结于动臂4a的斗杆4b、以及连结于斗杆4b的铲斗4c。液压缸5包括:用于驱动动臂4a的动臂缸5a、用于驱动斗杆4b的斗杆缸5b、以及用于驱动铲斗4c的铲斗缸5c。
20.动臂4a以能够以动臂旋转轴ax为中心旋转的方式被支承于上部回转体3。斗杆4b以能够以斗杆旋转轴bx为中心旋转的方式被支承于动臂4a。铲斗4c以能够以铲斗旋转轴cx为中心旋转的方式被支承于斗杆4b。
21.动臂旋转轴ax、斗杆旋转轴bx和铲斗旋转轴cx相互平行。动臂旋转轴ax、斗杆旋转轴bx、及铲斗旋转轴cx,与平行于回转轴rx的轴正交。在以下的说明中,可将与回转轴rx平行的方向称作上下方向;可将与动臂旋转轴ax、斗杆旋转轴bx、及铲斗旋转轴cx平行的方向称作左右方向;可将与动臂旋转轴ax、斗杆旋转轴bx及铲斗旋转轴cx、以及回转轴rx这两个方向正交的方向称作前后方向。以就坐于驾驶座椅9的驾驶员为基准,存在作业机4的方向为前方,与前方相反的方向为后方。以就坐于驾驶座椅9的驾驶员为基准,左右方向中的一方为右方,与右方相反的方向为左方。远离下部行走体2的接地面的方向为上方,与上方相反的方向为下方。
22.驾驶室6配置于上部回转体3的前方。驾驶室6配置于作业机4的左方。作业机4的动臂4a配置于驾驶室6的右方。
23.驾驶室
24.图2是表示实施方式涉及的液压挖掘机1的驾驶室6的图。液压挖掘机1具备配置于驾驶室6的操作部10。为了使液压挖掘机1的至少一部分动作而对操作部10进行操作。操作部10由就坐于驾驶座椅9的驾驶员进行操作。液压挖掘机1的动作包括下部行走体2的动作、上部回转体3的动作、及作业机4的动作中的至少一个。
25.操作部10包括:用于使上部回转体3及作业机4动作而被操作的左作业杆11及右作业杆12、用于使下部行走体2动作而被操作的左行走杆13及右行走杆14、以及左脚踏板15及右脚踏板16。
26.左作业杆11配置于驾驶座椅9的左方。通过将左作业杆11沿前后方向进行操作,使斗杆4b进行倾卸动作或挖掘动作。通过将左作业杆11沿左右方向进行操作,使上部回转体3
左回转或右回转。右作业杆12配置于驾驶座椅9的右方。通过将右作业杆12沿左右方向进行操作,使铲斗4c进行挖掘动作或倾卸动作。通过将右作业杆12沿前后方向进行操作,使动臂4a进行下降动作或上升动作。
27.左行走杆13及右行走杆14配置于驾驶座椅9的前方。左行走杆13配置于右行走杆14的左方。通过将左行走杆13沿前后方向进行操作,使下部行走体2的左侧的履带进行前进动作或后退动作。通过将右行走杆14沿前后方向进行操作,使下部行走体2的右侧的履带进行前进动作或后退动作。
28.左脚踏板15及右脚踏板16配置于驾驶座椅9前方。左脚踏板15配置于右脚踏板16的左方。左脚踏板15与左行走杆13联动。右脚踏板16与右行走杆14联动。也可以通过操作左脚踏板15及右脚踏板16,来使下部行走体2进行前进动作或后退动作。
29.定位系统
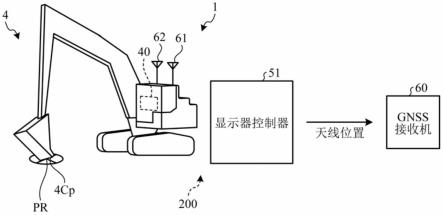
30.图3是用于说明液压挖掘机1的定位的图。图4是表示本实施方式涉及的液压挖掘机1的定位系统200的示意图。图5是表示本实施方式涉及的液压挖掘机1的定位系统200的一个示例的框图。定位系统200使用rtk定位,对液压挖掘机1的位置进行定位,所述rtk定位使用了作为卫星定位系统的gnss。
31.如图3所示,rtk定位为:通过分别搭载于设置在已知点pf的固定站fs和可移动的移动台ms上的卫星定位系统的接收机,即gnss接收机rc,来测算多个gnss卫星sv发送的载波相位,以确定移动台ms的位置的方式。在图3中表示了gnss卫星sv1、gnss卫星sv2、gnss卫星sv3、以及gnss卫星sv4。
32.载波相位是通过累加各gnss卫星sv与gnss接收机rc之间的距离的变动量而得到的。在gnss接收机rc处于初始状态(刚启动后)时,各gnss卫星sv与gnss接收机rc之间包含多少波数(称作“整数偏差”或“模糊数(ambiguity)”)未知。因此,作为初始化处理,搭载于移动台ms的gnss接收机rc通过对使各卫星的距离误差最小的移动台的位置进行探索(称作迭代计算),来确定高精度的移动台的位置和各gnss卫星sv的整数偏差。
33.使用固定台fs的校正信息,对gnss接收机rc接收到的位置信息进行校正,从而求取移动台的位置。然而,在固定台fs与移动台ms之间的距离较长的情况下,通过校正信息获得的校正效果变差,从而导致gnss接收机rc测算的位置的误差增大。上述误差增大,会导致初始化处理中的gnss接收机rc难以探索位置,无法求取移动台ms的高精确度的位置,从而初始化处理一直不完成。
34.因此,定位系统200首先通过rtk定位以外的方法来计算移动台ms的位置。然后,定位系统200基于计算出的移动台ms的位置,通过搭载于移动台ms的gnss接收机rc进行初始化处理,使未知的变数减少,并使整数偏差的计算容易收敛。在本实施方式中,定位系统200基于与作业现场中已定位的已知的基准点pr位置重合的、液压挖掘机1的作业机4的齿尖4cp的位置,来计算配置于液压挖掘机1的卫星定位系统的天线,即gnss天线61的位置。定位系统200向通过rtk定位来进行定位计算的gnss接收机60输出控制指令,该控制指令使gnss接收机60使用计算出的gnss天线61的位置,来执行将各gnss卫星的整数偏差与gnss天线61的位置作为未知数的、定位计算的初始化处理。
35.定位系统200包括:用于检测作业机4的各个缸的行程长度的缸行程传感器5a、imu(inertial measurement unit:惯性测量装置)30、传感器控制器(计算部)40、显示器50的
显示器控制器(初始化控制部)51、gnss接收机60、以及gnss天线61、62。gnss天线61用于求取液压挖掘机1的位置;gnss天线62用于求取液压挖掘机1的车身的方位角即横摆角。
36.缸行程传感器5a用于检测表示作业机4的姿态的信息。缸行程传感器5a包括:动臂缸传感器5aa、斗杆缸传感器5ba、以及铲斗缸传感器5ca。动臂缸传感器5aa、斗杆缸传感器5ba以及铲斗缸传感器5ca配置于作业机4。动臂缸传感器5aa用于检测表示动臂缸5a的动作量即行程长度的动臂缸长度数据。斗杆缸传感器5ba用于检测表示斗杆缸传感器5ba的动作量即行程长度的斗杆缸长度数据。铲斗缸传感器5ca用于检测表示铲斗缸5c的动作量即行程长度的铲斗缸长度数据。缸行程传感器5a将检测到的各个缸长度数据输出至传感器控制器40。
37.imu30为状态检测装置,其用于检测表示液压挖掘机1的动作的动作信息。此外,天线61、62也是状态检测装置的一个示例。在本实施方式中,动作信息也可以包括表示液压挖掘机1的姿态的信息。表示液压挖掘机1的姿态的信息示例有液压挖掘机1的侧倾角、俯仰角及横摆角。imu30安装于上部回转体3。imu30例如还可以设置在驾驶室6的下部。
38.imu30用于检测液压挖掘机1的角速度及加速度。伴随液压挖掘机1的动作,液压挖掘机1会产生如在行走时产生的加速度、在回转时产生的角加速度及重力加速度这样的各式的加速度,而imu30至少检测并输出重力加速度。在此,重力加速度为,与对重力的抵抗力对应的加速度。imu30用于检测:例如在三维全局坐标系(x,y,z)中的、x轴方向、y轴方向及z轴方向的加速度、以及绕x轴、y轴及z轴的角速度(旋转角速度)。
39.全局坐标系是以固定在地球上的原点为基准的坐标系。全局坐标系由gnss限定。
40.传感器控制器40具有:cpu(central processing unit:中央处理器)等处理器,即处理部;以及ram(random access memory:随机存储器)及rom(read only memory:只读存储器)等存储装置,即存储部。imu30的检测值、以及动臂缸传感器5aa、斗杆缸传感器5ba和铲斗缸传感器5ca的检测值被输入至传感器控制器40中。经由显示器控制器51,由gnss接收机60求取的液压挖掘机1在全局坐标上的位置被输入至传感器控制器40。传感器控制器40作为计算部而发挥功能。
41.传感器控制器40在gnss接收机60完成初始化处理后,基于液压挖掘机1的齿尖位置数据、以及表示作业现场的现状地形的现状地形数据,生成表示目标齿尖位置的目标齿尖位置数据。齿尖位置数据是表示液压挖掘机1的齿尖4cp的当前位置的数据。齿尖位置数据是基于液压挖掘机1在全局坐标中的位置、缸行程传感器5a的检测值、以及imu30的检测值而生成的。例如生成将由现状地形数据表示的现状地形向下偏移预设距离后的虚拟目标地面,目标齿尖位置数据以使齿尖4cp贴近该虚拟目标地面的方式生成。传感器控制器40基于齿尖位置数据及目标齿尖位置数据,生成并输出用于控制作业机4的动作的作业机指令値。
42.传感器控制器40基于作业机4的齿尖4cp的位置,计算配置于作业机械1的gnss天线61的位置,所述作业机4的齿尖4cp的位置与在作业现场中已定位的已知的基准点pr位置重合。传感器控制器40将在车身坐标系中求得的液压挖掘机1的gnss天线61的位置变换为全局坐标系,并将其输出至显示器50的显示器控制器51。
43.传感器控制器40还可以基于已知的基准点pr的位置、以及表示作业机4的姿态的角度,来计算gnss天线61的位置,所述作业机4的姿态为,在将作业机4的齿尖4cp与基准点
pr的位置重合的状态下的姿态。具体来说,传感器控制器40基于在三维的现场坐标系中测算到的基准点pr的位置、以及在将作业机4的齿尖4cp与基准点pr的位置重合的状态下检测到的缸行程传感器5a的检测值,在车身坐标系(xm,ym,zm)中求取液压挖掘机1的gnss天线61的位置。
44.由动臂缸传感器5aa的检测值表示的动臂缸5a的动作量、斗杆缸传感器5ba的检测值表示的斗杆缸5b的动作量、以及铲斗缸传感器5ca的检测值表示的铲斗缸5c的动作量可以得到表示作业机4的姿态的信息。表示作业机4的姿态的信息例如由动臂4a与上部回转体3形成的角度θ1、动臂4a与斗杆4b形成的角度θ2、以及斗杆4b与铲斗4c形成的角度θ3限定。
45.传感器控制器40还可以基于姿态角来计算gnss天线61的位置,所述姿态角包括液压挖掘机1的侧倾角、俯仰角及横摆角。具体来说,传感器控制器40还基于在将作业机4的齿尖4cp与基准点pr的位置重合的状态下检测到的imu30的检测值,在车身坐标系中求取液压挖掘机1的gnss天线61的位置。
46.由作为imu30的检测值的、液压挖掘机1的角速度及加速度,可得到液压挖掘机1的姿态角(侧倾角及俯仰角)。横摆角可从显示器控制器51获取。
47.显示器50用于显示规定的显示数据。显示器50具有显示器控制器51、以及显示部52。此外,显示部52也可以分开设置。显示器控制器51具有:cpu等处理器,即处理部;以及ram及rom(read only memory)等存储装置,即存储部。显示器控制器51作为初始化控制部发挥功能。显示器控制器51向通过rtk定位来进行定位计算的gnss接收机60输出控制指令,该控制指令使gnss接收机60使用由传感器控制器40计算出的gnss天线61的位置,来执行将各gnss卫星的整数偏差和gnss天线61的位置作为未知数的、定位计算的初始化处理。显示器控制器51向gnss接收机60输出从传感器控制器40获取的、变换为全局坐标系的液压挖掘机1的gnss天线61的位置。
48.显示器控制器51由gnss接收机60求取的天线方位角以及gnss天线61、62在车身上的配置关系,求取车身的方位角,即横摆角。此外,将求取到的横摆角输出至传感器控制器40。
49.显示部52包括如平板显示屏(lcd:liquid crystal display)或有机电致发光显示屏(oeld:organic electroluminescence display)这样的平板显示屏。显示部52能够显示gnss接收机60的初始化处理的进行状态,如:gnss接收机60正在执行初始化处理、或已完成初始化处理等。显示器50与传感器控制器40及gnss接收机60可进行数据通信地连接。
50.gnss接收机60作为全局坐标运算装置发挥功能。gnss接收机60具有:cpu等处理器,即处理部;以及ram及rom等存储装置,即存储部。gnss接收机60是利用gnss来检测液压挖掘机1的当前位置的位置检测装置。gnss接收机60基于gnss天线61接收到的与gnss电波对应的信号,来求取gnss天线61在图1所示的全局坐标系中的位置。作为gnss的一个示例,可以例举gps(global positioning system:全球定位系统),但并不限于此。gnss天线61例如设于液压挖掘机1上。
51.gnss天线61配置于上部回转体3。gnss天线61用于检测液压挖掘机1的当前位置。gnss天线61与gnss接收机60连接。gnss天线61接收到的与gnss电波对应的信号被输入至gnss接收机60。
52.gnss接收机60在初始化处理中,通过迭代计算来推算并确定各gnss卫星的整数偏
差,以求取作为移动台的gnss天线61的高精度的位置。gnss接收机60在执行初始化处理时,获取从显示器50的显示器控制器51获取的、以全局坐标系表示的gnss天线61的位置。gnss接收机60使用由全局坐标系表示的gnss天线61的位置,通过迭代计算来推算并确定各gnss卫星的整数偏差。
53.gnss接收机60在完成初始化处理后,将生成的gnss天线61的位置输出至显示器50的显示器控制器51。
54.gnss接收机60通过基线解算,由gnss天线61、62的位置接收到的卫星信号来计算方位角,并将该方位角作为以gnss天线61为轴的gnss天线62的天线方位角。此外,gnss接收机60将计算出的天线方位角输出至显示器控制器51。
55.计算机系统
56.图6是表示本实施方式涉及的计算机系统1000的框图。上述的定位系统200包括计算机系统1000。计算机系统1000具有:处理器1001,如cpu(central processing unit);主内存1002,其包含如rom(read only memory)这种非易失性存储器及如ram(random access memory)这种易失性存储器;存储器1003;以及接口1004,其包含输入输出电路。上述的定位系统200的功能作为计算机程序被存储于存储器1003中。处理器1001将计算机程序从存储器1003中读取并加载至主内存1002,依照计算机程序来执行上述的处理。此外,计算机程序还可以经由网络传送至计算机系统1000。
57.计算机程序或计算机系统1000按照上述的实施方式,能够执行以下处理:将作业机4的齿尖4cp的位置与作业现场中已定位的已知的基准点pr重合;由与作业机4的齿尖4cp位置重合的基准点的位置,计算配置于作业机械1的gnss天线61的位置;以及向通过实时动态定位进行定位计算的gnss接收机60输出控制指令,该控制指令用于使gnss接收机60使用计算出的gnss天线61的位置来执行将各gnss卫星的整数偏差与gnss天线61的位置作为未知数的、定位计算的初始化处理。
58.图7是表示本实施方式涉及的液压挖掘机1的定位方法的一个示例的流程图。在作业现场中,基准点pr在三维的现场坐标系中被测算,从而其位置是已知的。使液压挖掘机1启动,则gnss接收机60执行初始化处理。显示器50中能够显示初始化处理的进行状态,如:gnss接收机60正在执行初始化处理、或已完成初始化处理等。当gnss接收机60的初始化处理一直不完成时,例如,通过驾驶员的操作,执行如图7所示的处理。首先,驾驶员对作业机4进行操作,将作业机4的齿尖4cp的位置与作业现场中已定位的基准点pr重合。
59.定位系统200在传感器控制器40及显示器50的显示器控制器51中执行步骤sp1至步骤sp5的处理。并且,在gnss接收机60中执行步骤st1至步骤st4。
60.传感器控制器40计算gnss天线61的位置(步骤sp1)。具体来说,传感器控制器40基于已知的基准点pr的位置、在将作业机4的齿尖4cp与基准点pr重合的状态下检测到的缸行程传感器5a的检测值、以及imu30的检测值中的至少一方,在车身坐标系中计算液压挖掘机1的gnss天线61的位置。传感器控制器40将计算出的gnss天线61的位置输出至显示器控制器51。
61.显示器控制器51将从传感器控制器40获取的gnss天线61的位置输出至gnss接收机60(步骤sp2)。
62.gnss接收机60从显示器控制器51获取gnss天线61的位置(步骤st1)。
63.显示器控制器51向gnss接收机60输出控制指令,以使其使用传感器控制器40计算出的gnss天线61的位置,来执行将各gnss卫星的整数偏差与gnss天线61的位置作为未知数的、初始化处理(步骤sp3)。
64.gnss接收机60中断正在执行的初始化处理(步骤st2)。
65.gnss接收机60基于获取的gnss天线61的位置,重新进行初始化处理(步骤st3)。
66.显示器控制器51对由gnss接收机60进行的初始化处理是否完成进行判断(步骤sp4)。在判定由gnss接收机60进行的初始化处理已完成的情况下(步骤sp4:是),前进至步骤sp5。在没有判定由gnss接收机60进行的初始化处理已完成的情况下(步骤sp4:否),再次执行步骤sp4的处理。
67.显示器控制器51向gnss接收机60输出控制指令,以使其解除gnss天线61的位置固定模式(步骤sp5)。
68.gnss接收机60将gnss天线61的位置固定模式解除(步骤st4)。在gnss接收机60的初始化处理中,模式被设定为固定模式,由此,将gnss天线61的位置视作固定的位置而进行处理。在设定为固定模式期间,无法通过rtk定位来测定液压挖掘机的位置。通过解除固定模式,能够通过rtk定位来测定可移动的液压挖掘机1的高精度的位置。
69.由此,由于在gnss接收机60的初始化处理中,未知的变数减少,使得整数偏差的计算变得容易收敛,因此gnss接收机60能够适当地完成初始化处理。在gnss接收机60完成初始化处理后,即使液压挖掘机1移动,也能够求取搭载于液压挖掘机1的gnss天线61的高精度的位置。
70.此外,图7的流程图为一个示例,在其他实施方式中,也可以不一定执行所有的步骤。例如,已对gnss接收机60一直不完成初始化处理的情况的示例进行了说明,但也可以在不处于gnss接收机60一直不完成初始化处理的情况下执行。这种情况下,例如,可以不执行步骤st2、步骤sp3。
71.效果
72.如上所述,在本实施方式中,使通过rtk定位来进行定位计算的gnss接收机60,基于由已知的基准点pr的位置计算出的gnss天线61的位置,执行定位计算的初始化处理。根据本实施方式,在gnss接收机60中,能够使用gnss天线61的位置,通过迭代计算来推算并确定各gnss卫星的整数偏差。根据本实施方式,能够抑制出现gnss接收机60一直不完成初始化处理的状态。本实施方式能够适当地执行gnss接收机60的初始化处理。
73.以上,对实施方式进行了说明,但实施方式并不限于上述的内容。此外,上述的结构要素包括:本领域技术人员能够容易想到的要素、实质上相同的要素以及通常所说的均等范围的要素。进一步地,能够对上述的结构要素进行适当的组合。进一步地,在不脱离实施方式的主旨的范围内,能够对结构要素进行各种省略、替换以及变更中的至少一种。例如,作为由传感器控制器40执行的处理而进行了说明的各个处理,也可以由显示器50的显示器控制器51或这些以外的控制器来执行。例如,作为由显示器50的显示器控制器51执行的处理而进行了说明的各个处理,也可以由传感器控制器40或这些以外的控制器来执行。例如,还可以将传感器控制器40及显示器50的显示器控制器51的功能,安装在一个控制器中。
74.在本实施方式中进行的、将作业机4的齿尖4cp与已知的基准点pr进行位置重合的
作业,也是以往在作业开始时进行的作业。在本实施方式中,由于驾驶员不进行新的作业,因此能够抑制增加作业负担。
75.此外,在上述实施方式中,作为作业机械,以液压挖掘机1为例进行了说明,但并不限于此,也可以为推土机或轮式装载机等其他的作业机械。
76.此外,在上述实施方式中,对将作业机4的齿尖4cp与已知的基准点pr位置重合的情况进行了说明,但并不限于此,也可以将作业机4的其他部分与已知的基准点pr进行位置重合。
77.在上述实施方式中,对由显示器控制器51计算得到横摆角的情况进行了说明,但也可以由传感器控制器40计算得到横摆角。具体而言,显示器控制器51将gnss接收机60求取的天线方位角输出至传感器控制器40,传感器控制器40基于天线方位角以及gnss天线61、62在车身上的配置关系计算出横摆角即可。
78.在上述实施方式中,对使gnss天线61用于求取液压挖掘机1的位置的情况进行了说明,但并不限于此。例如,也可以使gnss天线62用于求取液压挖掘机1的位置。这种情况下,可以使gnss天线61用于求取液压挖掘机1的车身的方位角,即横摆角。此外,还可以设置gnss天线61及gnss天线62以外的gnss天线,并用该gnss天线来求取液压挖掘机1的位置。
79.在上述实施方式中,对gnss天线为两根的情况进行了说明,但并不限于此,gnss天线也可以为一根。例如,在作业机械为推土机的情况下,也可以基于一根gnss天线检测到的速度矢量,计算车身的方位。
80.上述实施方式的作业机为一个示例,也能够适用于推土机的推土铲、以及轮式装载机的铲斗等其他的作业机械的作业机。
81.符号说明
[0082]1…
液压挖掘机(作业机械),2
…
下部行走体,3
…
上部回转体,4
…
作业机,4a
…
动臂,4b
…
斗杆,4c
…
铲斗,5
…
液压缸,5a
…
动臂缸,5aa
…
动臂缸传感器,5b
…
斗杆缸,5ba
…
斗杆缸传感器,5c
…
铲斗缸,5ca
…
铲斗缸传感器,6
…
驾驶室,9
…
驾驶座椅,10
…
操作部,11
…
左作业杆,12
…
右作业杆,13
…
左行走杆,14
…
右行走杆,15
…
左脚踏板,16
…
右脚踏板,30
…
imu,40
…
传感器控制器(计算部),50
…
显示器,51
…
显示器控制器(初始化控制部),52
…
显示部,60
…
gnss接收机(卫星定位系统的接收机),61
…
gnss天线(卫星定位系统的天线),62
…
gnss天线(卫星定位系统的天线),200
…
定位系统,1000
…
计算机系统,1001
…
处理器,1002
…
主内存,1003
…
存储器,1004
…
接口,ax
…
动臂旋转轴,bx
…
斗杆旋转轴,cx
…
铲斗旋转轴,rx
…
回转轴。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
