技术特征:
1.一种作业机械的定位系统,其使用了实时动态定位,所述实时动态定位使用卫星定位系统,所述作业机械的定位系统的特征在于,具备:计算部,其基于所述作业机械的作业机的位置,计算配置于所述作业机械的卫星定位系统的天线的位置,所述作业机与作业现场中已定位的已知的基准点位置重合;以及初始化控制部,其向通过实时动态定位来进行定位计算的卫星定位系统的接收机输出控制指令,所述控制指令用于使所述接收机使用所述计算部计算出的所述卫星定位系统的天线的位置,来执行将各卫星的整数偏差与所述卫星定位系统的天线的位置作为未知数的、定位计算的初始化处理。2.根据权利要求1所述的作业机械的定位系统,其特征在于,所述计算部基于所述基准点的位置、以及表示所述作业机的姿态的角度,计算所述卫星定位系统的天线的位置。3.根据权利要求1或2所述的作业机械的定位系统,其特征在于,所述计算部基于所述作业机的包括侧倾角、俯仰角以及横摆角的姿态角,计算所述卫星定位系统的天线的位置。4.根据权利要求1至3中任一项所述的作业机械的定位系统,其特征在于,所述计算部基于已与所述基准点位置重合的所述作业机的齿尖的位置,计算所述卫星定位系统的天线的位置。5.一种作业机械,其特征在于,具备:行走部,其搭载所述作业机并进行行走;以及权利要求1至权利要求4中任一项所述的作业机械的定位系统。6.一种作业机械的定位方法,其为使用了实时动态定位的作业机械的定位方法,所述实时动态定位使用卫星定位系统,所述作业机械的定位方法的特征在于,包括:将作业机的一部分的位置与作业现场中已定位的已知的基准点重合;由与所述作业机的一部分的位置重合后的所述基准点的位置,计算配置于所述作业机械的卫星定位系统的天线的位置;以及向通过实时动态定位来进行定位计算的卫星定位系统的接收机输出控制指令,所述控制指令用于使所述接收机使用计算出的所述卫星定位系统的天线的位置,来执行将各卫星的整数偏差与所述卫星定位系统的天线的位置作为未知数的、定位计算的初始化处理。
技术总结
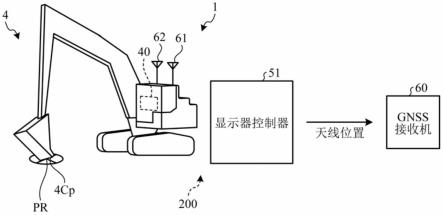
一种使用了使用卫星的定位系统的RTK定位的作业机械1的定位系统200,其具备:作为计算部的传感器控制器40,其基于与作业现场中已定位的已知的基准点PR位置重合的作业机械1的作业机4的位置,对配置于作业机械1的卫星定位系统的天线的位置进行计算;以及作为初始化控制部的显示器控制器51,其向通过RTK定位来进行定位计算的卫星定位系统的接收机输出控制指令,该控制指令用于使所述接收机使用计算出的卫星定位系统的天线的位置,来执行将各卫星的整数偏差与卫星定位系统的天线的位置作为未知数的、定位计算的初始化处理。定位计算的初始化处理。定位计算的初始化处理。
技术研发人员:近藤俊一郎 藤井悠人 田上健
受保护的技术使用者:株式会社小松制作所
技术研发日:2021.04.14
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。