1.本发明的领域是医疗技术和工程,特别是接骨术和矫形器。本发明结合了医学成像来创建处理过的骨骼的原型,以塑造形成接骨术或矫形器的板。本发明还包括用于处理具有轻微水平和垂直运动的金属板和联轴器的机械工程,可用于矫形器和机器人技术。
背景技术:
2.目前,用于接骨的板是通过铸造手术用钢或钛制造的,在这些钢或钛上开有孔,用螺钉将它们固定在骨头上。孔允许定位螺钉。它们针对每种通用类型的骨骼和骨折以各种厚度、形状和尺寸制造。供应商根据骨骼和骨折的类型提供通用表格,包括用于对齐、钻孔和拧紧的螺钉和器械。
3.本领域的接骨术和矫形器将一块板固定到骨头的一侧,以在愈合和治疗期间将其固定在适当的位置。在手术室里,对准器、导板、钻头和螺钉将金属板固定在骨头上。这些板是刚性钛或不锈钢,按骨骼和骨折类型通用,带有螺钉孔。有些具有适合骨骼形状的轮廓和曲线。板的厚度为2至4毫米,宽度为10至15毫米,长度根据需要而定。
4.在关节和椎骨的情况下,需要将部件保持在适当的位置并保持既定的距离,也可以使用带有螺钉的板,以限制椎骨或关节的运动。
5.用螺钉固定的板有几个缺点:它们是刚性的,它们不适应骨骼的轮廓。更昂贵的弯曲和轮廓板并没有显示出比非轮廓板更好。它们不是最佳解决方案,因为骨骼中的螺钉会降低其结构强度。在有限的情况和限制下,手术需要时间来对齐、钻出各种孔并拧紧。由于身体中存在刚性板和螺钉、静电和张力,它们会给患者带来不适。在某些情况下,必须卸下板或一些螺钉。
6.有大量关于接骨术和矫形器的专利以及将它们固定在骨骼上的方法。以下是示例。
7.us2019059962是一种用螺钉固定的接骨板,可以倾斜以更好地抓住骨头。它与本发明提出的不同,因为它是用螺钉固定的板。
8.wo2019018397建议根据骨骼的解剖结构调整接骨板,并建议使用3d成像将接骨板调整到骨骼的形状。它与本发明的不同之处在于使用了用螺钉固定的板,并且形状是指弯曲的板,而不是模制在骨头原型上的金属板。
9.us2009292317a1提出了一种连接椎骨的方法,允许椎骨之间的相对运动。它包括一个带有两个自由端的柔性系带、一个椎骨之间的垫片和一个夹紧机构。它与本发明的不同之处在于,在后者中,系泊是用夹子完成的,它没有引入垫片,但它使它们保持分开,并且水平和垂直运动是通过旋转形成矫形器。
10.us2005010214a1涉及一种腰椎骨缝合系统,其允许角度高于垂直方向。它与本发明的不同之处在于它不被夹子支撑。
11.wo2018191527a1涉及可生物降解的金属合金、它们的制备方法以及它们在医疗器械和患者植入物中的应用。它们将适用于本发明,因为薄膜比板更易于生物降解。
12.一种技术建议使用螺栓较少的板,仅在端部,并用八形电缆加固以提高抗拉强度。
13.没有发现专利或文献提出基于预成型金属板、模制并如本发明所建议的用夹具固定的骨缝合术或矫形器。
技术实现要素:
14.本发明提出了一种用于接骨术的金属板和夹具的机构,该机构保持位置并连接骨骼的骨折部分以进行修复,并提出一种矫形方式以保持椎骨和关节就位、分离和可移动。所提出的接骨术由一块或几块本领域所用材料的薄金属板组成,预成型并模制成骨折骨的尺寸和形状,放置在骨头周围。
15.金属板具有波浪形状、通道和起伏,以使结构弯曲、扭转和剪切应力具有一致性和强度。用夹子固定的接骨术和矫形器,位于骨骼周围的金属板中形成的通道中;它们在愈合过程中保持骨板金属组件的固定和刚性,并且不使用螺钉来固定它。
附图说明
16.图1显示了薄板底座1的透视图,具有用于夹具的通道2、接触骨骼的微接触点3和允许接骨术延伸至附近的小骨折,如踝关节。
17.图2显示了三个平面基本金属板的透视图,它们连接在一起形成带有用于夹具的通道2的接骨术。
18.图3显示了几个垂直关节16示例的透视图和俯视图,用于连接薄板底座1的几个部分并扩大需要断裂的覆盖区域。显示夹具的通道2,微接触点3。
19.图4显示了由两个部分形成的水平关节的透视图,这两个部分通过滑动连接在一起。这些关节中的每一个都固定在形成接骨术的金属板上。
20.图5显示了另一种形式的金属板的前视图,该金属板用夹子模制和固定以保持椎骨和关节分开。关节可防止垂直位移并允许接骨术的轻微旋转和倾斜。
21.图6显示了夹具的透视图,用于将用于接骨的金属板紧固到骨头、椎骨或关节,其定位在接骨通道2中。显示夹具的放大部分。
22.图7显示了用于将接骨术固定到骨头、椎骨或关节的另一个夹具的透视图,该夹子被插入到接骨术的通道2中。
23.图8示出了用于收紧和锁定夹具以将接骨术或模制矫形器固定到骨折骨和椎骨的器械示例的透视图。
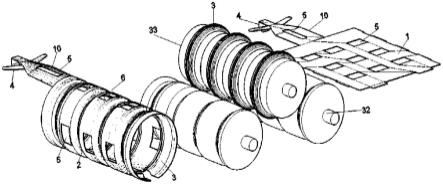
24.图9显示了接骨金属板机器和预成型接骨的透视图。
25.图10显示了用于在骨折骨上进行接骨术的成型机的机构的透视图。
26.图11显示了钣金成型机的前视图,它由压力轮40组成,通过将之前成型的钣金压在骨折骨17的原型上,压印轮廓、起伏和骨折骨的金属板表面差异。
27.图12显示了机器及其压力轮的透视图。
28.图13显示了成型机的正面视图。
29.图14显示了三种形状的微接触点的细节。
30.图15显示了用钢板接骨和螺钉治疗的腓骨和胫骨骨折的伦琴图像。同一图像显示了用本发明的接骨术治疗的骨折,没有螺钉。
具体实施方式
31.本发明的用于接骨术的金属板和与夹子耦合的机构由单件或多个连接件的扁平金属板形成。将金属板切割成要治疗的骨骼的适当尺寸,制成波浪形,然后将几块金属板连接起来,将它们模制成骨折骨的宽度和长度。垂直关节位于骨骼的侧面,水平关节位于其轴线周围。
32.基本的接骨术是用一块扁平的金属板进行的,金属板是根据骨折骨的尺寸和特征模制而成的,可能有也可能没有突起,包括夹子和紧固件。狭窄的基本接骨术,不与其他接骨,在性能合适、没有通道或不方便介入骨间膜的地方使用。
33.用本发明完成的接骨也由垂直连接的几个基本金属板的结合形成,以加宽它。它包括夹子及其闭合件。
34.通过改变片材的规格、其材料、位置和在片材中制成的起伏和通道的数量以及夹具的数量,可以使骨部分的结构强度和紧固适应各种情况。这种形式的接骨术允许使用现有技术中其他材料的金属板。本领域技术人员正在考虑可以使用的各种其他材料。根据材料的性质,下面描述的成型和成型过程会发生变化,并且可能会更容易。
35.骨骼的3d图像和原型是根据艺术制作的;现在有几种方法可用于获取可用于打印骨骼原型的3d图像。
36.本发明提出了一种用于将骨折部分骨保持在适当位置和位置以进行修复的接骨术,以及一种使椎骨和关节保持在适当位置、分离和可移动的矫形器方式,包括:
37.1.本领域中用于接骨术的材料的一块或几块薄金属板,以柔性形式连接,预成型,并模制成骨折骨的尺寸和形状,围绕骨折骨排列。它们可以是较厚的金属板。它也可以只是一个金属板。
38.2.金属板具有起伏、通道和低起伏,以使结构弯曲、扭转和剪切应力具有一致性和强度。通道在其内侧有微点,接骨术或矫形器与骨骼接触。总而言之,金属板和夹具的高度约为2至3.5毫米,类似于本领域的接骨术。
39.3.用于固定接骨术和矫形器的夹具,位于金属板制成的通道中,围绕骨骼,在愈合过程中保持骨-金属板接头的固定和刚性。
40.4.金属板有视点,可以在手术过程中观察骨折块的位置,然后用于x射线控制。
41.5.手术前,金属板在骨折骨骼的通用原型或患者的骨骼上成型和模制,从数字图像以3d形式打印。在这个原型上,金属板是圆形的,并根据患者骨骼的形状、尺寸和表面变化进行模制。接骨术和矫形器必须精确地调整到治疗骨骼的形状。夹具和应力组件经过校准以在特定情况下使用,以实现精确配合和最佳结构性能。结构性能可以在计算机中进行理论上的测量,将其与推荐的要求进行比较,模拟选项,并引入成型和成型的变化,直到获得每种情况下具有最佳性能的接骨术或成型和成型矫形器。专业人员根据专家的指示和要求进行这些调整。
42.6.外科医生使用特殊仪器或本领域中的仪器将模制的接骨术固定在骨折的骨头、椎骨或关节周围,拧紧并锁定夹子。它不使用螺钉将其固定在骨头上。
43.7.一旦用夹子将接骨固定在骨折的一端,另一端被校准以改善骨折部分的纵向接近和对齐,夹子将收紧并锁定在另一端。所有夹子都将被固定,对所有夹子重复拉紧和闭合。
44.8、卡箍拉紧锁紧装置有突起,可穿过卡箍两端的孔,拧紧锁紧。它有一个指示施加的张力的指示器。
45.9.另一种方式是模制矫形器,可将椎骨和关节保持在适当位置并保持间距。这种矫形器允许轻微的水平和垂直运动。通过将水平关节放置在椎骨或关节之间,将成型矫形器的每个部分固定在骨骼上。这些关节使椎骨保持一定距离并允许水平运动。关节可以有微型轴承,在机器人和机电一体化中也很有用。
46.10.获得与骨折的骨头、椎骨或关节精确配合的接骨和模制矫形器的过程如下:
47.a.它从骨折的骨头、椎骨或关节的数字图像开始,就像目前所做的那样。
48.b.专科医生和助理技术人员在计算机辅助成像系统中对图像进行评估,以确定需要修复的内容。
49.c.将骨折的骨头模拟成健康的骨头。专家和技术人员评估力和张力以达到健康骨骼,并确定创建和模制由外科医生固定的接骨术或矫形器的指南。该模拟将使用从骨骼数据库中绘制健康骨骼作为模型的算法来完成。
50.d.制作健康骨骼,并在其上模制预成型的金属板,使用生产过程中描述的设备和过程。根据年龄、性别、种族和骨折类型或要治疗的病例,每种类型的长骨、椎骨和关节都需要进行接骨和矫形。该艺术具有人类和动物骨骼的数据库和工程。如果这些数据库被证明具有实际用途,它们将会得到提升。
51.根据数据库的不同,使用通用原型可能就足够了,而无需3d打印患者骨折的骨骼、椎骨或关节。
52.e.如果是生产通用接骨器和矫形器,一旦成型完成,将被灭菌并放置在灭菌包装中。
53.f.在接骨术和普通矫形器的情况下,如有必要,该过程包括在手术室前调整金属板和矫形器。
54.材料切割、预成型、成型和调整过程可以通过基于特定图像或数据库和算法的人工智能进行手动、机械化或机器人自动化。
55.下图显示了钣金零件和矫形器的组成、制造和功能;它们是对本发明的说明并且不限于此。
56.图1显示了薄板底座1的透视图,具有用于通道2的通道、接触骨骼的微接触点3、允许延长接骨到附近的小骨折的延伸部10,例如作为踝关节,其末端4用于固定骨折,以及延伸夹具11以固定在骨骼周围。已经绘制了四个扩展把手11,但每个案例将确定需要多少个。它显示了钣金中的观察孔5、手术期间和控制图像中的观察孔,以及连接多个薄板底座1的垂直耦合接头8和水平耦合接头9给出要覆盖的区域的形状。这些关节的折叠不超过接骨的高度,尽管它们在图中被夸大以突出它们。它显示了用于固定的夹具7和保持孔12所在的通道6,如图7所示。
57.图2显示了三个薄板底座1的结合部的透视图,这些薄板底座1结合在一起形成一个接骨装置,带有用于夹子的通道2、接触骨骼的微接触点3、允许的延伸部10将接骨术延伸到附近的小骨折,如踝关节,以及用于固定该骨折的末端4,薄板底座1中的观察孔5,以便在手术期间和对照图像中查看。它显示了图7中所示的夹具7所在的通道6。它显示了两个延伸部10以固定与主要骨折相邻的小骨折,每个延伸部分都有两个侧向延伸夹具11以固定到骨
头上。延伸部10和侧向延伸夹具11的数量和形状适合骨骼和骨折的类型。这种形状还允许使用夹子和这些扩展在小骨折上使用接骨术。
58.接骨术可以由所需的金属板数量、尺寸和形状组成。数量取决于需要覆盖的区域、切割的形状和延伸的数量,具体取决于骨骼的尺寸以及骨折的位置、类型和大小。确定上述参数的信息是从骨折骨的数字图像中获得的。根据主治医生的指示,将金属板切割、预成型,然后成型,构成接骨器,将其包裹在患者的骨骼上并用夹子固定。
59.图3显示了垂直关节16的各种示例的透视图和俯视图,以连接薄片底座1的部分并扩大需要断裂的待覆盖区域。显示夹具的通道2,微接触点3。为了更好地说明,垂直关节16的尺寸被夸大了。其高度为3至3.5毫米,不大于通道2的高度。基底金属板通过横向滑动将它们统一起来,并将在地层中变平。
60.这些垂直关节允许金属板的横向延伸和成型到长骨折所需的尺寸,将金属板保持在一起,使组件更加灵活,并增强金属板的结构强度以抵抗剪切、扭转和纵向。
61.图4显示了由两个部分形成的水平关节17的透视图,这两个部分通过滑入而连接。这些关节中的每一个都固定在形成矫形器的金属板上。与之前的一样,将板材切割成一定尺寸,在板材上进行折叠以形成接头。关节具有微型轴承18,微型轴承18安装在水平关节19中,它们在其中移动,这些微型轴承由减少摩擦的材料制成。它们还有一个衬垫20以将轴承保持在适当位置。
62.由于关节通过滑动插入两个部分,并且由于其结构的几何形状,它可以缓冲冲击,使拉伸更加灵活,并防止两个部分相互接触。这种保持垂直分离并允许旋转和倾斜的接头,以及接头中的轴承和减震器,可用于机器和机械臂的延伸。容纳轴承18的水平关节19的内部可以在内部具有止动件(未示出),以在受控距离处调节旋转,这在机器人和机器中有用,以调节运动。
63.图5显示了矫形器的透视图,该矫形器在另一种模制金属板形式中用夹子固定,以保持分离的椎骨和关节。矫形器是由放置夹具的关节和部分组成的主体。组装的支撑接头可防止垂直位移并允许矫形器轻微旋转和倾斜。它显示了用于夹子的通道2,以及作为固定夹子的椎骨17的下四分之一。关节被放置在数量上,以提供结构强度并允许在手术期间和控制图像上进行可视化。组装的支撑连杆21的宽度将决定水平位移的长度。垂直倾斜可以适用于不同的度数。
64.水平关节是椎骨和关节矫形器的一部分,它们使被夹紧的部分保持稳定和分离。模制矫形器用夹子固定在两个或多个椎骨上,接头位于椎骨之间,在设定的距离处,防止它们垂直接触并允许旋转和倾斜运动。
65.由于断面在椎骨的垂直轴上以90
°
切割,关节和骨骼不是完美的圆周,并且由于需要有骨骼的观察孔,因此带或不带轴承18的水平关节不会覆盖整个在椎骨的外围,几个支撑连杆21位于足以提供结构强度的外围,允许观察孔5和运动自由度。有多少关节及其位置由专家决定。
66.该矫形器的制造过程与接骨术相同。首先是金属板的切割和成型,延伸部分是形成支撑关节9(图4)的基础,支撑关节9(图4)滑入以形成套件。根据评估,它可以是一个或几个金属板组成的集合,垂直连接,如图3所示。
67.图6显示了一个夹具的透视图,用于将接骨术固定到骨头或矫形器上,固定到椎骨
或关节上,该夹具插入图1所示的金属板的通道2中,在其周围拧紧并锁定与图8所示的手术器械一起使用。它显示了形成延伸部10的主体的金属板,图8中所示的手术器械的夹持突起34插入保持孔12的位置。它还显示了插入图1所示金属板的锁定孔14中的夹持突起34。
68.夹具具有与基本金属板中创建的通道相同的形状,其尺寸略小于金属板的通道2的尺寸,因此它可以精确地接合在其中,当拧紧时,将接骨术或矫形器固定到骨头
69.夹子高约3毫米,连接到骨骼周围的接骨器上,外科医生使用如图8所示的手术器械通过压力将它们拧紧并锁定。
70.图7显示了另一种类型的夹子的透视图,用于将接骨术固定到骨头、椎骨或关节上,该夹子插入金属板的通道2中。它具有与前一个相同的特征,具有不同的闭合系统,由同一片中的穿孔金属板组成,然后折叠形成闭合,放大显示。
71.它显示了带有折叠和锁定孔14的平板15的锁定。切割成形状和尺寸,这些部件被模制以形成夹具的另一端穿过的通道,使得夹持突起13接合在锁定孔14中。褶皱部分被硬压以完成闭合。
72.夹具有许多替代品,包括安装在接骨金属板的通道2中的电缆。它们可以有不同形式的闭包,未显示。在图7中,保持孔12可以钻在通道2的底部,夹具底部的夹子插入其中并锁定。该锁定模式未示出。
73.图8显示了用于收紧和锁定夹具以将接骨术或模制矫形器固定到骨折骨上的器械示例的透视图。该仪器具有在旋转轴23上支撑杠杆的手柄20,夹持突起34插入位于夹具一端的保持孔12中,另一端插入锁定孔14如图(图3)所示,它们刺穿以拧紧夹具。夹持突起34具有旋转接头22,以便于将它们插入锁定孔中。
74.它显示了带有数字指示器31的张力传感器30,用于测量施加在夹具上的张力。它具有安全挡块26以避免过度紧张,可通过转动蜗杆中的轮子27进行调整。显示在手术器械中常用的手柄棘轮24。该仪器可以用现有技术制造,手动或用电机、齿轮和命令操作,通过屏幕控制和显示张力值。张力指示器可以是数字的或模拟的,并且必须以这样的方式固定,以便在对张力仪器进行清洁和消毒时可以将其移除。
75.图9显示了用于成形用于接骨术的金属板和预成形金属板的机器的透视图,其中薄板底座1为待处理的骨骼切割和钻孔,其具有观察孔5和一个延伸部10以固定周围的小裂缝、板和固定末端4的方法。板材成型机是由三个气缸组成的卷材机,两个下圆柱体32具有用于夹具的通道2和已经描绘的特征。创建与骨骼接触的微接触点3的浮雕。上圆柱体33具有相同的特征,以高浮雕雕刻。平板在这20个圆柱体之间通过,它们通过压力在板上打印通道和特征,然后卷成弯曲形状,并根据需要具有尺寸和数量的延伸部10和末端4。该预成型接骨术将如下图所示模制。
76.图10显示骨折骨17上的金属板成型机的透视图,该成型机由压力轮40组成,通过将先前成型的金属板压在骨折骨17上来成型,打印断骨表面的轮廓、起伏和差异。显示了通过液压装置或弹簧在前轮上产生压力的压力缸41、车轮支架43和与压力缸的连接、支撑车轮的轴44和裂缝42。
77.由于截面与骨骼、椎骨和关节的垂直轴成90
°
切开,不是完美的圆周,并且它们的表面不光滑,因此需要使用压力机迫使预成型的片材形成形状、轮廓和表面变化的骨头。
78.使用的夹子越多,金属板就越接近骨骼的实际形状。它们是非常小的压力机,由液
压缸或弹簧提供动力。
79.该图示不包括用于成型机的液压缸、齿轮、液压泵和其他部件的支撑结构,因为在现有技术中有许多制造它们的方法。
80.它是一台宽约30厘米、高约25厘米、宽约20厘米的小型机器,包括底座、支架、骨固定器、齿轮、轴、导轨和其他必要元件。支撑圆柱体的轴将允许它们纵向移动,以将它们调整到预成型的片材上。
81.图11显示了由压力轮40组成的成型机的前视图,该成型机通过将先前形成的金属板压在骨折骨17上来成型,打印骨折骨的轮廓、起伏和表面差异。它显示了压在前轮上的压力缸41、车轮支架43以及与压力缸、轮轴44和裂缝42的连接。它还显示了薄板底座1、将容纳夹具的通道2、微接触点3和观察孔5的特性。
82.图12显示了由压力轮40组成的模制机的透视图,通过将它们压在骨折骨17上来模制先前形成的金属板,打印骨折骨表面的轮廓、起伏和差异。显示了通过液压装置或弹簧在前轮上产生压力的液压压力缸41、车轮支架43和与压力缸的连接、支撑车轮的轴44和裂缝42。它还显示了薄板底座1、将容纳夹具的通道2、微接触点3和观察孔5的特性。折痕
83.图13显示了由压力轮40组成的模制机的透视图,以通过将先前形成的金属板压在骨折骨17上来模制它们。显示了在前轮、车轮支架43和压力缸、支撑车轮的轴44上产生压力的压力缸41。
84.图14显示了与骨接触的三种形式的微接触点3的细节,布置在方便的距离处。这些微接触点是在生产过程中通过罢工形成的。它还显示了薄板底座1、通道2的通道、观察孔5,以便在手术期间和控制图像中透视。也可以在片材的表面上制造微孔,未示出。
85.图15显示了腓骨和胫骨骨折通过钢板接骨和螺钉愈合的伦琴图像。同一图像显示了使用本发明的接骨术愈合的骨折,没有螺钉。图片中不包括夹子。说明了本发明的两种形式的骨缝合术。如图所示,腓骨上的一个用金属板夹固定,胫骨上的一个用线夹固定。
86.可以观察到,骨的微小骨折0没有整合到钢板和螺钉的愈合中。也可以看出,骨折的进路没有完成,也没有对齐。
87.如果应用本发明的接骨术,这些微小的骨折0可以与金属板结合到骨中,并且可以改进接近和对齐。
88.用于骨合成的金属板的生产和成型
89.举例说明了手术用不锈钢或钛金属板或其他用于接骨术和长骨骨折的金属板的生产和成型,包括:
90.步骤0.工厂供应规格、厚度0.38至0.30毫米的钣金。
91.步骤1.根据每种骨骼和骨折类型的设计和尺寸,使用水射流或激光切割金属板。
92.步骤2.使用激光或水射流切割在设计形状和尺寸的板材上打孔。这种切割可以在步骤1中同时进行。
93.步骤3.用压板机对金属板进行预成型,其表面刻有起伏、通道、微接触点和任何其他设计。卷板机在其所有长度上都可以具有相同或不同的半径以模仿骨骼的形状。
94.此步骤根据每种类型的骨骼和骨折的设计和尺寸创建具有起伏、通道、微接触点的弯曲金属板,它只是接骨术的预成型,因为在每个接触点处都是一个半径等于滚压机的圆柱体,不会复制骨骼形状和表面的起伏。
95.步骤4.创建水平和垂直弯曲以连接两个或多个金属板。
96.步骤5.通过使用液压或机械压力轮在患者骨骼3d原型上沿骨骼原型及其周围放置的片材上按压预成型金属板来成型接骨术。骨合成具有与预成型金属板相同的波形、通道形状。压力轮从顶部移动到底部,迫使金属板复制骨骼原型的轮廓和起伏。压轮的支撑可以纵向移动,以将它们调整到位于骨头上的预成型片材。这种位移可以是手动的或电子的和人工智能的。
97.当它围绕骨头上的金属板移动和按压时,每个压力轮都会复制它所按压的表面的轮廓和不规则性,因此旋转尖端越窄,使用的压力轮越多,成型的形状就越准确。此步骤创建接骨术的最终形状。在这两种情况下,在成型和成型中,都可以使用热量来促进该过程,尤其是在使用塑料材料或金属金属板的情况下。
98.步骤6.模具夹在通道和轮廓上,它们的长度和闭合等级,与用于金属板预成型的板材滚压机相同的滚轮。该步骤产生由外科医生连接的弯曲夹具,以将接骨术固定到骨骼上。
99.步骤7.在手术器械使用的温度和时间下,用高压灭菌的方法来对成型的接骨器和支架进行消毒。
100.步骤8.将最终的接骨术放入无菌包装中,密封并包装。
101.步骤9.交付给外科医生或发送到目的地。
102.步骤10.为了形成夹具,根据每种骨骼和骨折类型的设计和尺寸,使用水射流或激光切割金属板。
103.步骤11.使用激光或水射流切割在设计形状和尺寸的板材上打孔。可以在步骤10中同时进行此切割。
104.步骤12.创建水平和垂直弯曲以连接两个或多个金属板。
105.步骤13.用于3d打印要修复的骨折骨的图像。
106.步骤14.健康骨骼各部分的3d印象,现在已分离。自动对齐骨折骨的算法,不包括在本发明中。
107.步骤15.将接骨术和夹具预调整到3d骨骼模型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。