1.本发明涉及用于机场跑道异物扫描及清除系统、方法,应用在民航机场领域。
背景技术:
2.随着现代机场不断的发展和人流量的增加,对于智慧机场的建设日益迫切。机场内跑道异物的发现和清除是靠人为保障和牵引。机场跑道异物(foreing object ofdebris)是指散落在机场跑道上的可能损伤飞机的某种不属于跑道设施的外来物质,如金属固件、防水塑料布、小石块、橡胶块、纸片、落叶等。fod可能造成飞行器轮胎损坏、发动机叶片吸入损坏等故障,从而引起起飞中断、航班延误等事故和损失,甚至会由此引起空难,危及乘客的生命安全,造成巨大的经济损失和影响机场安全运行。人为排查和清理跑道异物时间上会有不及时性以及漏排等问题。因此机场的安全运营对fod可靠探测和快速处置系统提出了迫切需求。本发明可以有效的解决人为排查跑道时间延误和漏排等情况,能够全天候、全时段、及时、准确、全面的解决上述问题。
技术实现要素:
3.针对现有技术的以下不足,目前国外已成功研制出几款不同的检测设备,主要采用雷达检测、视频图像、可见光等技术,国内虽未研制出成品,但也在积极参与探究。国内主要靠人为检测,人为检测存在以下问题:1)在流量高峰期,人和设备很难上跑道;2)在恶略天气下,人为检测难度大;3)人为很难做到全时段检测。
4.为解决上述问题,本发明所采取的技术方案是:
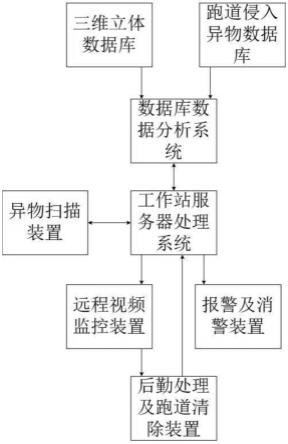
5.本发明是一种用于机场跑道异物(fod)扫描及清除系统,系统包括异物扫描装置、三维立体数据库、跑道侵入异物数据库、数据库分析系统、工作站服务器处理系统、远程视频监控装置、报警及消警装置、后勤处理及跑道清除装置。
6.异物扫描装置的输出接口与三维立体数据库、跑道侵入异物数据库、数据库分析系统、工作站服务器处理系统的输入接口并行连接;
7.三维立体数据库、跑道侵入异物数据库、数据库分析系统、工作站服务器处理系统的输出接口与远程视频监控装置、报警及消警装置的输入接口并行连接;远程视频监控装置、报警及消警装置的输出接口与后勤处理及跑道清除装置的输入接口并行连接;从而完成fod的检测及清除工作。
8.异物扫描装置包括激光雷达扫描设备、视频拍摄设备及计算机设备;激光雷达扫描设备和视频监控设备,将扫描到的数据通过计算机设备进行处理得到物体的物理属性及形态特征;
9.异物扫描装置全天候不间断的对机场跑道进行扫描,进而实时的获取跑道上厘米级(≧2cm)以上的物体位置及形态坐标数据,并通过视频拍摄设备抓取实时图片及录像推送至工作站服务器处理系统。
10.三维立体数据库通过输入本地的外围设备如飞机、跑道及坐标数据、灯杆、连廊等
数据接入到数据库分析系统。
11.跑道侵入异物数据库输入常见的跑道异物如金属碎片、小鸟、落叶、草团等数据接入到数据库分析系统。
12.数据库分析系统通过对接入的数据进行处理从而得到跑道上物体的属性、状态、坐标等信息。
13.工作站服务器处理系统来处理数据库分析系统数据如非外来物体或是跑道异物的威胁程度等级信息,从而推送至远程视频监控装置、报警及消警装置、后勤处理及跑道清除装置处理。
14.远程视频监控装置是把处理好的数据通过大屏显示系统显示出来。
15.报警及消警装置用来显示报警的威胁等级、坐标位置、清除对象及清除确认信息。
16.后勤处理及跑道清除装置用来处理报警的信息,清除跑道上存在威胁的物体,以及可能需要人为现场判断的跑道异物威胁事件的处理。
17.一种后勤处理及跑道清除装置,用于清除跑道上存在威胁;后勤处理及跑道清除装置包括异物处理装置,在异物处理装置上设置有无人驾驶或人工驾驶驱动的行走架体,作为平台,在行走架体上设置有带有负压的清扫部,用于清扫跑道上的异物;
18.在行走架体上设置有存液池及垃圾池,在行走架体上设置有横向导程槽及平行的横向工艺槽,在横向导程槽中横向移动有横向滑块,在横向滑块上升降设置有喷嘴部,用于下探出横向工艺槽并对地面异物喷射,喷嘴部在清扫部前方、侧部或后方;
19.在行走架体上设置有通过管路与存液池连通的混合部,在混合部上设置有文丘里管一进口,文丘里管出口通过管路连接喷嘴部;文丘里管另一进口连接洗涤液。
20.作为上述技术方案的进一步改进:
21.在垃圾池上方设置有导向漏斗,在导向漏斗一侧设置有清除机械手;清除机械手包括铰接在行走架体上的第一摆动杆及连接杆,在第一摆动杆端部铰接有俯仰杆的根部,在连接杆的端部铰接俯仰杆的中部;
22.在俯仰杆的头部设置有安装座,在安装座上设置有微动推杆,在微动推杆端部设置有偏心杆部的一端,在偏心杆部的另一端设置有夹持机械手或负压吸盘,用于拾取设定大小的异物;
23.俯仰杆的上扬工位位于导向漏斗上方,用于下落异物于垃圾池中。
24.在行走架体上设置有多普勒传感器和/或雷达;
25.多普勒传感器和/或雷达,用于感知异物的大小及位置。
26.一种后勤处理及跑道清除方法,方法包括以下步骤;
27.s1,三维立体数据库预存已知的跑道物体的三维成像数据并实时更新跑道物体的三维成像数据,并通过输入本地的外围设备的数据接入到数据库分析系统;跑道侵入异物数据库,输入跑道异物的数据接入到数据库分析系统;
28.s2,工作站服务器采集数据库分析系统的预存数据,异物扫描装置,实时扫描异物并与预存信息比较,进行识别;
29.s3,如果认为是异物,报警及消警装置报警,工作站服务器上传异物坐标,远程视频监控装置进行远程监控,观察异物的影像;
30.s4,后勤处理及跑道清除装置,对异物进行清除。
31.作为上述技术方案的进一步改进:
32.在s4中,执行清除步骤;
33.s4.1,首先,根据异物的信息,选择对应的夹持机械手或负压吸盘;然后,行走架体,行走到异物处;其次,第一摆动杆及连接杆摆动,使得俯仰杆下落;再次,微动推杆操控偏心杆部,使得夹持机械手或负压吸盘拾取设定大小的异物;
34.s4.2,俯仰杆抬起到上扬工位,来到导向漏斗上方,使得异物下落于垃圾池中;
35.s4.3,首先,通过推杆驱动横向滑块移动,喷嘴部到达异物离开处;然后,启动泵站,混合部抽取存液池的液体,液体通过文丘里管混合洗涤液,从喷嘴部喷出到异物离开处,进行冲洗;
36.s4.4,启动负压的清扫部,清扫跑道。
37.本发明设计合理、成本低廉、结实耐用、安全可靠、操作简单、省时省力、节约资金、结构紧凑且使用方便。
附图说明
38.图1为机场跑道异物(fod)扫描及清除系统的数据流程处理图
39.图2为异物处理系统。
40.图3是本发明的导向漏斗示意图。
41.其中:1、跑道;2、飞机;3、异物;4、雷达;5、异物处理装置;6、行走架体;7、清扫部;8、混合部;9、存液池;10、横向导程槽;11、喷嘴部;12、文丘里管;13、多普勒传感器;14、垃圾池;15、导向漏斗;16、第一摆动杆;17、俯仰杆;18、连接杆;19、微动推杆;20、夹持机械手;21、偏心杆部。
具体实施方式
42.如图1-3,本发明的基本思路为机场跑道异物检测及清除的一整套系统包括:异物扫描装置、三维立体数据库、跑道侵入异物数据库、数据库分析系统、工作站服务器处理系统、远程视频监控装置、报警及消警装置、后勤处理及跑道清除装置。
43.其中,异物扫描装置安装在跑道两侧边灯位置并根据民航局规定高度安装。异物扫描装置主要为激光雷达设备及数据传输设备,激光雷达水平角度一般在15
°
左右,仰角8
°
,在边灯两侧交替间隔100安装。远程视屏监控设备可采取边灯式安装也可采取灯塔式安装,根据机场跑道实际情况选定安装方式。
44.三维立体数据库采用人工输入及确定的方法输入机场内机场基础设施、跑道基础运营设备、飞机型号物理属性和其他环境,当雷达扫描到这些设备时把数据处理后推送给地勤人员做相应的反应。跑道侵入异物数据库是指常见异物物理属性及后发现异物物理属性等数据,用来确定和区分跑道内物体的危险等级。数据库分析系统是用来处理雷达扫描数据通过对接入的数据进行处理从而得到跑道上物体的属性、状态、坐标等信息。工作站服务器处理系统来处理数据库分析系统数据如非外来物体或是跑道异物的威胁程度等级信息,从而推送至远程视频监控装置、报警及消警装置、后勤处理及跑道清除装置处理。所述的报警及消警装置用来显示报警的威胁等级、坐标位置、清除对象及清除确认信息。后勤处理及跑道清除装置用来处理报警的信息,清除跑道上存在威胁的物体,以及可能需要人为
现场判断的跑道异物威胁事件的处理。
45.如图1-3所示,本实施例的后勤处理及跑道清除装置,用于清除跑道上存在威胁;后勤处理及跑道清除装置包括异物处理装置5,在异物处理装置5上设置有无人驾驶或人工驾驶驱动的行走架体6,作为平台,在行走架体6上设置有带有负压的清扫部7,用于清扫跑道1上的异物3;
46.在行走架体6上设置有存液池9及垃圾池14,在行走架体6上设置有横向导程槽10及平行的横向工艺槽,在横向导程槽10中横向移动有横向滑块,在横向滑块上升降设置有喷嘴部11,用于下探出横向工艺槽并对地面异物3喷射,喷嘴部11在清扫部7前方、侧部或后方;
47.在行走架体6上设置有通过管路与存液池9连通的混合部8,在混合部8上设置有文丘里管12一进口,文丘里管12出口通过管路连接喷嘴部11;文丘里管12另一进口连接洗涤液。
48.在垃圾池14上方设置有导向漏斗15,在导向漏斗15一侧设置有清除机械手;清除机械手包括铰接在行走架体6上的第一摆动杆16及连接杆18,在第一摆动杆16端部铰接有俯仰杆17的根部,在连接杆18的端部铰接俯仰杆17的中部;
49.在俯仰杆17的头部设置有安装座,在安装座上设置有微动推杆19,在微动推杆19端部设置有偏心杆部21的一端,在偏心杆部21的另一端设置有夹持机械手20或负压吸盘,用于拾取设定大小的异物3;
50.俯仰杆17的上扬工位位于导向漏斗15上方,用于下落异物3于垃圾池14中。在行走架体6上设置有多普勒传感器13和/或雷达4;
51.多普勒传感器13和/或雷达4,用于感知异物3的大小及位置。
52.本实施例的后勤处理及跑道清除方法,方法包括以下步骤;
53.s1,三维立体数据库预存已知的跑道物体的三维成像数据并实时更新跑道物体的三维成像数据,并通过输入本地的外围设备的数据接入到数据库分析系统;跑道侵入异物数据库,输入跑道异物3的数据接入到数据库分析系统;
54.s2,工作站服务器采集数据库分析系统的预存数据,异物扫描装置,实时扫描异物3并与预存信息比较,进行识别;
55.s3,如果认为是异物3,报警及消警装置报警,工作站服务器上传异物3坐标,远程视频监控装置进行远程监控,观察异物3的影像;
56.s4,后勤处理及跑道清除装置,对异物3进行清除。
57.在s4中,执行清除步骤;
58.s4.1,首先,根据异物3的信息,选择对应的夹持机械手20或负压吸盘;然后,行走架体6,行走到异物3处;其次,第一摆动杆16及连接杆18摆动,使得俯仰杆17下落;再次,微动推杆19操控偏心杆部21,使得夹持机械手20或负压吸盘拾取设定大小的异物3;
59.s4.2,俯仰杆17抬起到上扬工位,来到导向漏斗15上方,使得异物3下落于垃圾池14中;
60.s4.3,首先,通过推杆驱动横向滑块移动,喷嘴部11到达异物离开处;然后,启动泵站,混合部8抽取存液池9的液体,液体通过文丘里管12混合洗涤液,从喷嘴部11喷出到异物离开处,进行冲洗;混合部8配套有泵站,由于没有选好型,故没有标记,为图3标记6上方示
意图,通过管路连接,为现有技术。s4.4,启动负压的清扫部7,清扫跑道1。
61.作为可以单独或组合使用,异物处理装置5实现自动化移动,实现对异物的拾取,行走架体6,为示意图,可以根据机场的等级及当地特点进行适应性改造,清扫部7为现有技术,作为改进,混合部8实现了液体与洗涤液的混合,存液池9可以为清水,横向导程槽10实现横向移动,配合纵向行走,实现了固定支撑,避免了车辆必须横向移动,喷嘴部11进行高压喷射清理,文丘里管12实现了自动清水与对应的洗涤液配合,避免池体中的清水被污染,多普勒传感器13或雷达实现了扫描与测距,垃圾池14实现了异物的下落,导向漏斗15实现了导向,本发明通过第一摆动杆16,俯仰杆17,连接杆18实现了夹持机械手20的俯仰,微动推杆19实现了微调,偏心杆部21实现了避免挡碍。本发明实现了自动异物拾取或清理,多功能,效率高。
62.本发明充分描述是为了更加清楚的公开,而对于现有技术就不再一一列举。
63.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;作为本领域技术人员对本发明的多个技术方案进行组合是显而易见的。而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。本发明未详尽描述的技术内容均为公知技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。