1.本发明属于植树机器人领域,具体涉及一种多树苗自动化种植机器人。
背景技术:
2.智能移动机器人技术的发展,为农业机械设备提了发展平台。随着技术的发展,越来越多的机器人用于植树造林。但现有的植树机器人还存在以下缺点:1、自动化程度低,大部分的植树机器人需要人为手动操控,无法实现一体化种植,消耗人力成本高;2、结构庞杂,对于植树任务显得不便、繁杂;3、效率低下,大部分的植树机器人作业一次只能种植一棵树木,种植工作效率低下。
技术实现要素:
3.本发明的目的在于提供一种自动化种植机器人,该机器人自动化程度高,从而使人力成本低;结构简单,操作方便;一次能种植多棵树苗,种植效率高。
4.本发明采用的技术方案是:
5.一种多树苗自动化种植机器人,其包括履带移动车架、储存运输平台、松土种植部、土壤夯实单元;
6.所述履带移动车架用于带动整个自动化种植机器人行走,以及支撑整个自动化种植机器人;
7.所述储存运输平台置于履带移动车架顶部,用于多个树苗同时进行存储、运输;
8.所述松土种植部有多个,置于履带移动车架上,用于对多个种植点的土壤进行松土,以及对松土后的土壤同时进行多个树苗的种植;
9.所述土壤夯实单元设置在履带移动车架底部一侧,用于同时对多个种植后的种植点土壤进行夯实。
10.所述履带移动车架包括车架支撑、连接结构、履带组、履带移动控制单元;
11.所述车架支撑包括4根车架立柱;
12.所述连接结构包括两根履带横向连接杆、履带组连接杆,所述履带横向连接杆平行设置,且与履带组连接杆连接;
13.所述履带组有两个,分别位于履带横向连接杆的两端,其包括履带、支撑侧板、履带驱动轮、承重轮;所述支撑侧板有两个,分别位于履带两侧,且两个支撑侧板通过铜柱连接;每个履带组有2根履带组连接杆,履带组连接杆分别与两侧的支撑侧板连接;四根车架立柱平行设置,分别与履带组连接杆、履带横向连接杆连接;所述履带驱动轮包括履带移动3d打印件和环设在履带移动3d打印件上的环氧树脂环,该履带驱动轮在控制单元的履带移动步进电机作用下驱动履带运动;所述承重轮安设在一个支撑侧板上;
14.所述履带移动控制单元包括履带移动步进电机和履带移动控制器,所述履带移动控制器控制履带移动步进电机工作,从而带动履带运动。
15.按上述方案,所述履带移动3d打印件包括驱动轮本体和位于驱动轮本体上的齿,
该齿与履带上的齿相适配,结构简单,便于制作。
16.按上述方案,所述承重轮包括带轴承的环氧树脂板、铜柱;所述环氧树脂板有两个,通过铜柱连接,形成承重轮本体;所述承重轮本体通过承重轮光轴座和承重轮光轴固定在支撑侧板上,结构简单,安设方便。
17.按上述方案,所述承重轮有多个,安设在支撑侧板下部,以使整个结构在行走时更平稳。
18.按上述方案,所述履带内侧设有放置承重轮,并对承重轮起到左右限位的沟槽,以使整个结构更稳定、可靠。
19.按上述方案,所述履带为xh方形齿同步带,该履带价格低廉,且经久耐用。
20.按上述方案,所述履带横向连接杆通过角码和梯形螺母与履带组连接杆连接;所述履带组连接杆通过梯形螺母与支撑侧板连接;连接非常方便,且牢固。
21.按上述方案,所述履带移动步进电机通过梅花联轴器与履带驱动轮连接;所述履带移动控制器通过安设在支撑侧板上的电子罗盘和红外编码盘传来的数据控制履带移动步进电机工作,进而控制履带运行的速度和方向,增加整个装置是适应性,使其更能适应环境。
22.按上述方案,所述履带移动步进电机和履带移动控制器置于箱体内,能对整个控制单元起到保护和防干扰的作用。
23.按上述方案,储存运输平台包括支撑底板、存储结构、2个用于减少存储结构运动阻力的减阻结构、2个限制存储结构位移轨迹的限位结构、滑移结构、拨动结构、储存运输控制模块;
24.所述支撑底板固定在履带移动车架的车架支撑上,且其上设有至少4个输出口;
25.所述存储结构有两个,对称设置,置于支撑底板上,其包括环形设置的至少20个转筒单元;
26.一个存储结构对应一个减阻结构,所述减阻结构固定在支撑底板上;
27.一个存储结构对应一个限位结构,所述限位结构固定在支撑底板上;
28.所述滑移结构置于支撑底板上;所述拨动结构置于滑移结构上;控制模块控制拨动结构在滑移结构上滑动;
29.所述拨动结构在控制模块的作用下,对2个存储结构的转筒单元同时进行拨动,使转筒单元沿着限位结构的限制轨迹进行运动。
30.按上述方案,所述转筒单元包括塑料管、第一轴承,所述第一轴承套在塑料管上与塑料管过盈配合。
31.按上述方案,所述储存运输控制模块包括储存运输电机、舵机、储存运输控制器;所述储存运输电机、舵机与储存运输控制器电连接;所述储存运输电机通过第一连杆与拨动结构的支撑板连接,储存运输电机驱动第一连杆实现拨动结构的运动(储存运输电机工作带动拨动结构沿滑移结构上滑动);所述舵机控制拨动结构的主动拨杆工作。
32.按上述方案,所述拨动结构包括支撑板、主动拨杆、从动拨杆;
33.所述支撑板通过第一连杆与储存运输控制模块的储存运输电机连接,储存运输电机带动支撑板沿滑移结构滑动;
34.所述主动拨杆套在储存运输光轴上,储存运输光轴的一端与储存运输控制模块的
舵机连接,储存运输光轴的另一端与储存运输轴承座连接,储存运输轴承座与支撑板连接;舵机工作,带动主动拨杆运动,使主动拨杆呈水平设置或竖直设置;
35.所述从动拨杆套在储存运输光轴上,储存运输光轴的两端分别与储存运输轴承座连接,储存运输轴承座与支撑板连接;从动拨杆上的齿与主动拨杆上的齿相适配;主动拨杆运动带动从动拨杆运动,使从动拨杆的状态与主动拨杆的状态相同,从而同时拨动2个存储结构的转筒单元。
36.按上述方案,所述储存运输电机、储存运输控制器置于箱体内;所述舵机固定在舵机座上,所述舵机座置于拨动结构的支撑板上。
37.按上述方案,所述减阻结构包括置于支撑底板上的内圈减阻机构和外圈减阻机构,内圈减阻机构置于外圈减阻机构内,且内圈减阻机构和外圈减阻机构之间为存储结构的转筒单元的运动轨迹。
38.按上述方案,所述内圈减阻机构和外圈减阻机构均包括由牛眼轮和转动轴承形成的环形减阻,环形减阻由2个直边和两个弧形边组成,牛眼轮置于弧形边上,转动轴承置于直边上;所述牛眼轮置于支撑底板上;转动轴承固定到轴承固定板上,轴承固定板固定到支撑底板上。
39.按上述方案,所述限位结构包括内圈限位板、外圈限位板和转筒挡板;
40.所述外圈限位板呈环形,固定在支撑底板上,且位于外圈减阻机构上;
41.所述内圈限位板呈环形,置于外圈限位板内,固定在减阻结构的轴承固定板上,且位于内圈减阻机构上;内圈限位板、外圈限位板之间为存储结构的转筒单元的运动轨迹;
42.所述转筒挡板与内圈限位板连接。
43.按上述方案,所述外圈限位板包括呈环形的外圈环氧树脂板和圆柱形3d打印件;所述圆柱形3d打印件的一端与外圈环氧树脂板连接,另一端与支撑底板连接。
44.储存运输平台的工作流程为:
45.拨动结构在舵机的作用下,使主动拨杆、从动拨杆呈水平状态,此时主动拨杆、从动拨杆分别与两侧的转筒单元接触;随后储存运输电机带动连杆运动,进而使拨动结构机构在滑移结构的滑轨上滑动,从而使主动拨杆、从动拨杆拨动转筒单元,使转筒单元在限位结构限定的轨道内运动,实现树苗的运输,并使树苗从输出口输出,在转筒单元运动的过程中,通过减阻结构减少运动的阻力。当需要切换另一组树苗时,舵机转动,使主动拨杆、从动拨杆旋转至竖直状态,储存运输电机驱动整个拨动结构复位;复位后,舵机反向转动,使主动拨杆、从动拨杆再次呈水平状态;随后储存运输电机带动第一连杆运动,进而使拨动结构机构在滑移结构的滑轨上滑动,从而使主动拨杆、从动拨杆拨动转筒单元,再次实现树苗的运输,以及树苗的输出;重复上述动作,就能不停的实现树苗的运输。
46.所述松土植树部有4个,通过安装平台与履带移动车架的4根车架立柱上的松土种植固定板连接,松土种植固定板能沿车架立柱滑动;同一侧的松土种植固定板通过固定板连杆连接,所述固定板连杆上设有同步带安装板;升降同步带固定在同步带安装板,松土植树升降电机通过升降同步带带动固定板连杆上下移动,进而带动松土植树部上下移动;
47.所述松土植树部包括松土单元、种树单元、松土植树控制模块;
48.所述松土单元用于对土壤进行松土,其包括翻转机构、钻头机构、电磁铁机构,所述翻转机构的上端与种树单元连接,所述钻头机构与翻转机构的下端连接,所述电磁体机
构在通电情况下,使翻转机构和种树单元进行固定,在断电情况下,翻转机构能实现翻转;
49.所述种树单元用于输送种植植物,其包括顶部平台和种树管道,种树管道的进口与储存运输平台的支撑底板上的输出口相适配;种树管道穿过安装平台、顶部平台后伸入翻转机构中,当翻转机构翻转后,种树单元才能实现种树;
50.所述松土植树控制模块控制翻转机构、钻头机构、电磁铁机构工作;当松土植树控制模块使电磁铁机构通电时,翻转机构和种树单元进行固定,钻头机构进行松土作业;当松土植树控制模块使电磁铁机构断电时,松土植树控制模块控制翻转机构进行翻转,松土植树控制模块控制种树单元进行种树作业。
51.所述松土植树控制模块包括翻转控制模块,所述翻转控制模块包括翻转控制平台、翻转控制电机、第一翻转光轴、翻转齿轮组、第二翻转光轴、翻转同步轮、第一翻转同步带、第二翻转同步带、第一翻转传动轴、第二翻转传动轴;所述翻转控制平台通过翻转铜柱与安装平台连接,所述翻转控制电机置于翻转控制平台上,翻转控制电机通过第一翻转光轴与翻转齿轮组的第一翻转齿轮连接,第二翻转光轴与翻转齿轮组的第二翻转齿轮连接,第二翻转齿轮、第一翻转齿轮相啮合;第一翻转同步带套在第一翻转光轴上的翻转同步轮和第一翻转传动轴上的翻转同步轮上;第二翻转同步带套在第二翻转光轴上的翻转同步轮和第二翻转传动轴上的翻转同步轮上;翻转传动轴(第一翻转传动轴、第二翻转传动轴)的两端分别与同侧的两个翻转机构的翻转轴承座、侧板连接;第二翻转光轴置于翻转光轴轴承座上;翻转控制电机工作,带动第一翻转光轴转动,第一翻转光轴带动第一翻转齿轮转动,第一翻转齿轮带动第二翻转齿轮,第二翻转齿轮带动第二翻转光轴转动,第一翻转光轴、第二翻转光轴分别带动第一翻转同步带、第二翻转同步带运动,第一翻转同步带、第二翻转同步带分别带动第一翻转传动轴、第二翻转传动轴转动,第一翻转传动轴带动同侧的两个翻转机构翻转,第二翻转传动轴带动同侧的两个翻转机构翻转;
52.所述翻转机构包括翻转轴承座、侧板和底板;
53.所述翻转轴承座与种树单元固定连接;所述侧板有2个,分别位于种树管道的两侧,且通过强度支撑件连接,强度支撑件(强度支撑件为铜柱、打印件、螺栓)既起到支撑作用,又起到连接作用,使侧板构成的翻转机构结构更稳定可靠;所述底板与2个侧板的下端连接;翻转控制电机带动翻转传动轴转动,翻转传动轴带动侧板、底板旋转;
54.松土植树控制模块控制第一电机工作,第一电机带动光轴转动,光轴带动侧板转动,实现翻转;
55.所述钻头机构包括第二电机、钻头,所述第二电机安设在翻转机构的底板上;钻头的中心线与种树管道的中心线在同一条直线上;松土植树控制模块控制第二电机工作,第二电机带动钻头进行松土作业。
56.更进一步的方案是,所述钻头13为微型单头钻头,其中心轴直径为8mm;所述第二电机为无刷7字电机,其输出轴直径为5mm,轴与轴通过联轴器连接。采用该钻头和电机,能很好的实现松土,便于后续的种植。
57.更进一步的方案是,所述电磁铁机构包括电磁铁、铁片;所述电磁铁安设在种树单元的连接过渡件上,所述铁片安设在翻转机构的侧板上,当需要松土单元进行松土工作时,电磁铁通电,紧吸铁片;当需要种树单元工作时,电磁铁断电,松土单元被驱动翻转。
58.更进一步的方案是,所述种树管道通过管道固定打印件固定在顶部平台上;所述
顶部平台下部与连接过渡件连接。
59.更进一步的方案是,所述种树管道的下端设有阀门,所述阀门通过管夹固定在种树管道上;所述管夹的内径与种树管道相等,厚度为2mm;当种树单元工作时,植物输送至种树管道后,植物在重力的作用下,将阀门推开,种植在被钻头机构翻松过的土壤里。
60.更进一步的方案是,所述阀门包括2个阀门侧板、阀门顶板、阀门本体、弹力带;2个阀门侧板分别位于阀门顶板的两侧,2个阀门侧板、阀门顶板、阀门本体通过六面螺母进行固定;阀门本体置于种树管道的斜管口处,且该阀门本体与种树管道的斜管口相适配;2个阀门侧板、阀门顶板为环氧树脂板;
61.每个阀门侧板的中部设有安装孔,尾部设有弹性带连接孔;管夹上的圆柱穿过安装孔后由螺母固定,阀门侧板能绕圆柱转动(阀门的旋转圆心便是圆柱圆心);弹力带的一端固定在一侧阀门侧板上的弹性带连接孔上,弹力带的另一端穿过管夹上的孔后,与另一侧的阀门侧板上的弹性带连接孔固定连接,保证阀门不受作用力的情况下闭合,受到树苗重力压迫下打开,树苗掉落后再关闭。
62.更进一步的方案是,所述松土植树控制模块外套设有箱体。
63.松土植树部的工作流程为:
64.1)通过松土植树控制模块控制电磁铁带电,电磁铁紧吸铁片,使翻转机构与种植单元固定连接;
65.2)通过松土植树控制模块控制第二电机工作,第二电机带动钻头对土壤进行松土;
66.3)松土完毕后,通过松土植树控制模块控制电磁铁断电,电磁铁与铁片断开连接,通过翻转控制模块控制翻转控制电机工作,翻转控制电机带动翻转传动轴转动,翻转传动轴带动侧板翻转,进而使整个翻转机构、钻头机构翻转90
°
;翻转机构翻转后,种树管道不再置于翻转机构内;
67.4)种树管道中的植物(树苗)在重力作用下,冲开种树管道端部的阀门本体,种植在被翻松的土壤内;阀门本体在弹力带的作用下回位;
68.5)将整个装置移动到另一个需要种植的地方;
69.6)通过翻转控制模块控制翻转控制电机工作,翻转控制电机带动翻转传动轴转动,翻转传动轴带动侧板翻转,进而使整个翻转机构、钻头机构翻转回位;
70.7)重复步骤1)-6),直至完成种植。
71.按上述方案,所述土壤夯实单元包括至少两组压土轮组和一根土壤夯实连接杆;所述土壤夯实连接杆通过第二连杆固定在履带移动车架的履带横向连接杆上;
72.所述压土轮组包括两组对称设置的夯土轮、固定机构、拉簧机构;每个夯土轮分别通过固定机构与土壤夯实连接杆连接,使每个夯土轮与对夯土轮的称轴呈一定夹角;每个土轮对应一个拉簧机构,且拉簧机构的一端与固定机构连接,另一端与土壤夯实连接杆连接,拉簧机构使夯土轮紧贴土壤实现土壤夯实。
73.按上述方案,所述夯土轮与对称轴的夹角为25-35
°
,以便更好的实现夯土。
74.按上述方案,所述固定机构包括对称设置的2个固定单元和与固定单元连接的轮子光轴;
75.所述固定单元包括从外到内依次连接的固定侧板、支撑打印件、支撑光轴座;所述
固定侧板与土壤夯实连接杆连接。
76.按上述方案,所述支撑打印件的竖截面为直角梯形,直角梯形的直腰与固定侧板连接,直角梯形的斜腰与支撑光轴座连接,以便于使夯土轮与对称轴呈一定夹角,达到更好的夯土效果。
77.按上述方案,在直角梯形的斜腰上,靠近下底边处被切去一角,形成一个竖直边;采用竖直边,以便于确保两个支撑打印件的平行度,以便更好的控制夯土轮的倾斜角度。
78.按上述方案,所述固定侧板上设有轴承,光轴的一端与压土轮组光轴座连接,另一端依次穿过压土轮组的固定侧板上的轴承后,与另一个压土轮组光轴座连接;两个压土轮组光轴座与连接杆连接;结构简单,安装方便。
79.按上述方案,所述轮子光轴与水平面呈25-35
°
夹角,以便于使夯土轮与对称轴呈一定夹角,达到更好的夯土效果。
80.按上述方案,所述支撑打印件交错安装,以便轮子光轴与水平面呈一定夹角,以便能更稳定的完成夯土工作。
81.按上述方案,所述拉簧机构包括张紧拉簧和拉簧固定件,所述张紧拉簧的一端固定在固定机构的固定侧板上,另一端通过拉簧固定件与土壤夯实连接杆连接;通过设置张紧拉簧和拉簧固定件,使得夯土轮能始终贴紧土壤,起到夯土作用。
82.将树苗种植进种植点后,通过成对的夯土轮对种植点的土壤进行压实,压实后,通过履带移动车架将整个机器人移动到下一个种植点进行种植。
83.本发明的有益效果在于:
84.通过设置多个松土种植部,从而可以实现一次种植多棵树苗,种植效率高;
85.仅通过人工补充储存运输平台上的树苗,其余全部自动化,自动化程度高,人力成本低;
86.将松土单元、种树单元集成为一体,缩小了体积;
87.在松土阶段,种树单元的种树管道置于翻转机构中;在种植阶段,翻转机构处于翻转状态,种树单元进行种植,结构简单,操作方便;
88.运动速度快、种树效率高;
89.多处结构采用中心对称结构布置,结构平稳、可靠;
90.具有两个存储结构,且每个存储结构至少20个转筒单元,树苗储存量非常大,减少了工人工作强度,提高了树苗种植效率;
91.通过设置减阻结构,以减少树苗运输过程中的阻力,进而减少能源的消耗;
92.通过设置限位结构,使转筒单元能沿预定轨迹运动,提高了整个结构的稳定性;
93.通过设置滑移结构,便于移动整个拨动结构,从而拨动转筒单元,实现树苗的运输;
94.通过一个拨动结构同时拨动两个转筒单元,从而提高树苗的运输效率;
95.支撑底板起到支撑起整个储存运输平台的作用;
96.限位结构起到限制转筒单元位移轨迹的作用;
97.减阻结构可以将转筒单元运动过程中的滑动摩擦转变为转动摩擦,大大减少了树苗运输过程中的阻力;
98.转动单元在运动过程中,围绕着限位结构旋转,从而减少运输阻力;
99.存储结构对称布置,摩擦小、效率高、运动速度快、保养与修缮轻松;
100.通过少量的定制件(履带移动3d打印件)和标准件构成,使得整体价格便宜;
101.通过履带移动步进电机驱动驱动轮运动,进而驱动整个履带转动,耗能小,便于推广应用;
102.相比于现有的通过轮子作为行走机构的植树机器人,其采用履带,更能适用于荒漠的复杂地形;
103.结构简单,安装方便,便于推广应用;
104.采用两个履带组,起到支撑、行驶、避障的作用;
105.采用两块支撑侧板,对履带起到固定、支撑的作用;
106.通过设置承重轮起到承重的作用;
107.驱动轮采用3d打印件堆叠而成,制作成本低,效果好;
108.因采用履带结构,整个行走机构的重心偏低,能够平稳避障,适用于荒漠地形;
109.通过设置对称的夯土轮,从而实现一个种植点土壤的夯实,结构非常简单;
110.仅通过对称的夯土轮实现土壤的夯实,无需设置电机驱动,能源消耗低;
111.采用特殊结构是支撑打印件,从而使压土轮组的两个夯土轮呈一定夹角,从而更好的实现夯土;
112.采用拉簧使夯土轮紧贴土壤,从而实现良好的夯土效果;
113.通过设置多个压土轮组,从而实现多个种植点的土壤夯实,大大提高了植树效率;
114.压土轮组的夯土轮始终与土地接触,呈相切状态,具有良好的夯土效果。
附图说明
115.下面将结合附图及实施例对本发明作进一步说明,附图中:
116.图1是多树苗自动化种植机器人的结构示意图;
117.图2是多树苗自动化种植机器人的松土工作姿态示意图;
118.图3是多树苗自动化种植机器人的种树工作示意图;
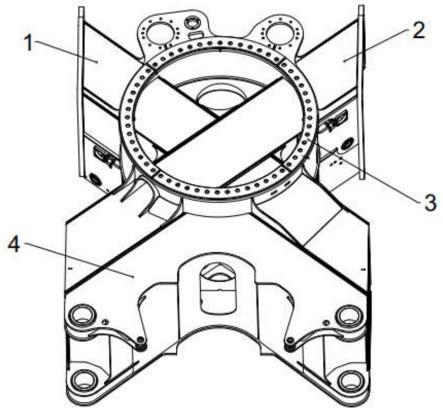
119.图4是履带移动车架的结构示意图;
120.图5是松土植树部、安装平台的结构示意图;
121.图6是翻转控制模块的结构示意图;
122.图7是履带移动车架(无车架立柱)的结构示意图;
123.图8是履带组、履带组连接杆的连接结构示意图;
124.图9是履带组的内部结构示意图;
125.图10是承重轮的结构示意图;
126.图11是驱动轮的结构示意图;
127.图12是储存运输平台(主动拨杆、从动拨杆呈水平状态)的结构示意图;
128.图13是储存运输平台(主动拨杆、从动拨杆呈垂直状态)的结构示意图;
129.图14是储存运输平台(无转筒结构、滑移结构、拨动结构、控制模块)的结构示意图;
130.图15是转筒单元的结构示意图;
131.图16是滑移结构、拨动结构的结构示意图;
132.图17是松土植树部的结构示意图;
133.图18是松土植树部的翻转机构翻转后的示意图;
134.图19是翻转机构、电磁铁、连接过渡件的结构示意图;
135.图20是种树管道和阀门的连接结构示例图;
136.图21是土壤夯实单元的结构示意图;
137.图22是土壤夯实单元的另一个视角的结构示意图;
138.图23是夯土轮单元的结构示意图;
139.图24是夯土轮单元(无夯土轮)的结构示意图;
140.图25是支撑打印件的结构示意图;
141.图中:1、履带移动车架;2、安装平台;3、同步带安装板;4、松土种植固定板;5、升降同步带;6、松土种植升降电机;7、储存运输平台;9、土壤夯实单元;1.2、升降滑轨;1.4、车架立柱;1.5、松土种植固定支座;2.2、翻转控制平台;2.3、第一翻转同步带;2.4、第一翻转传动轴;2.2.1、第二翻转齿轮;2.2.2、翻转光轴轴承座;2.2.3、第一翻转光轴;2.2.4、翻转铜柱;2.2.6、翻转控制电机;
142.l1、履带组;l1.1、履带;l1.2、支撑侧板;l1.3、履带驱动轮;l1.31、履带移动3d打印件;l1.32、环氧树脂环;l1.4、驱动轮光轴座;l1.5、承重轮;l1.51、环氧树脂板;l1.52、承重轮光轴;l1.53、轴承;l1.6、承重轮光轴座;l1.7、铜柱;l2、履带移动步进电机;l3、连接结构;l3.1、履带横向连接杆;l3.2履带组连接杆;l4、角码;l5、梅花联轴器;
143.t1、支撑底板;t2、支撑结构;t2.1、牛眼轮;t2.2、外圈限位板;t2.3、3d打印支撑;t2.4、轴承固定板;t2.5、六面螺母;t2.6、内圈限位板;t2.7、转动轴承;t2.8、转筒挡板;t3、拨动结构;t3.1、主动拨杆;t3.2、拨杆轴承座;t3.3、支撑板;t3.4、从动拨杆;t3.5、固定铰支座;t3.6、舵机座;t4、转筒单元;t4.1、塑料管;t4.2、第一轴承;t5、滑移结构;t6、第一连杆;t7、储存运输电机;t8、舵机;
144.p1、管道固定打印件;p2、顶部平台;p3、电磁铁;p4、铁片;p6、六面螺母;p7、管夹;p7.1、圆柱;p7.2、孔;p9、侧板;p10、种树管道;p11、第二电机;p12、阀门;p12.1、阀门侧板;p12.1.1、安装孔;p12.1.2、弹性带连接孔;p12.2、阀门顶板;p12.3、阀门本体;p13、钻头;p14、连接件;p15、翻转轴承座;p16、连接过渡件,p17、底板;
145.c1、土壤夯实连接杆;c2、压土轮组光轴座;c3、张紧拉簧;c4、夯土轮单元;c4.1、支撑打印件;c4.2、固定侧板;c4.3、轮子光轴;c4.4、夯土轮;c4.5、支撑光轴座;c4.6、轴承;c5、光轴;c6、拉簧固定件。
具体实施方式
146.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
147.参见图1-图25,一种多树苗自动化种植机器人,其包括履带移动车架1、储存运输平台7、松土种植部、土壤夯实单元。履带移动车架1用于带动整个机器人行走,以及支撑整个机器人。储存运输平台7置于履带移动车架1顶部,用于多个树苗同时进行存储、运输。松土种植部有多个,置于履带移动车架1上,用于对多个种植点的土壤进行松土,以及对松土
后的土壤同时进行多个树苗的种植。土壤夯实单元设置在履带移动车架1底部一侧,用于同时对多个种植后的种植点土壤进行夯实。
148.履带移动车架1作为机器人的行走机构,其包括车架支撑、连接结构l3、履带组l1、履带移动控制单元。车架支撑包括4根车架立柱1.4。连接结构l3包括履带横向连接杆l3.1、履带组连接杆l3.2。履带横向连接杆l3.1有两根,且平行设置。履带横向连接杆l3.1通过角码l4和梯形螺母与履带组连接杆l3.2连接,组成底盘。履带组l1有两个,分别位于履带横向连接杆l3.1的两端,其包括履带l1.1、支撑侧板l1.2、履带驱动轮l1.3、承重轮l1.5。支撑侧板l1.2有两个,分别位于履带l1.1两侧,且两个支撑侧板l1.2通过铜柱l1.7(100mm)连接。每个履带组有2根履带组连接杆l3.2,履带组连接杆l3.2通过梯形螺母与支撑侧板l1.2连接。四根车架立柱1.4平行设置,分别与履带组连接杆l3.2、履带横向连接杆l3.1连接;履带驱动轮l1.3包括履带移动3d打印件l1.31和环设在履带移动3d打印件l1.31上的环氧树脂环l1.32。承重轮l1.5通过承重轮光轴座l1.6和承重轮光轴l1.52固定在支撑侧板l1.2上。履带l1.1内侧设有放置承重轮,并对承重轮起到限位的沟槽。
149.履带移动控制单元包括置于箱体内的履带移动步进电机l2和履带移动控制器;履带移动步进电机l2通过梅花联轴器l5与履带驱动轮l1.3连接,履带移动控制器控制履带移动步进电机l2工作,履带移动步进电机l2带动履带驱动轮l1.3运动,从而带动履带l1.1运动。履带移动控制器通过安设在支撑侧板l1.2上的电子罗盘和红外编码盘传来的数据控制履带移动步进电机l2工作,进而控制履带运行的速度和方向。
150.本实施例中,履带移动3d打印件l1.31包括驱动轮本体和位于驱动轮本体上的齿,该齿与履带l1.1上的齿相适配。承重轮l1.5包括带轴承l1.53的环氧树脂板l1.51、铜柱l1.7(32mm);环氧树脂板l1.51有两个,通过铜柱l1.7连接形成承重轮本体。本实施例中,承重轮l1.5有多个,安设在支撑侧板l1.2下部。履带l1.1为xh方形齿同步带。
151.储存运输平台7包括支撑底板t1、存储结构、2个用于减少存储结构运动阻力的减阻结构、2个限制存储结构位移轨迹的限位结构、滑移结构t5(滑块导轨组)、拨动结构、储存运输控制模块。减阻结构和减阻结构构成支撑结构t2。支撑底板t1固定在履带移动车架1的车架支撑上,且其上设有至少4个输出口。存储结构有两个,对称设置,置于支撑底板t1上,其包括环形设置的至少20个转筒单元t4。每个转筒单元t4包括塑料管t4.1、第一轴承t4.2;第一轴承t4.2套在塑料管t4.1上,与塑料管t4.1过盈配合。采用第一轴承t4.2套在塑料管t4.1上的方式是便于转筒单元在减阻结构的作用下实现减阻,减少能量的消耗。一个存储结构对应一个减阻结构。减阻结构包括置于支撑底板t1上的内圈减阻机构和外圈减阻机构,内圈减阻机构置于外圈减阻机构内,且内圈减阻机构和外圈减阻机构之间为存储结构的转筒单元t4的运动轨迹。内圈减阻机构和外圈减阻机构均包括由牛眼轮t2.1和转动轴承t2.7形成的环形减阻,环形减阻由2个直边和两个弧形边组成,牛眼轮t2.1置于弧形边上,转动轴承t2.7置于直边上;牛眼轮t2.1置于支撑底板t1上;转动轴承t2.7与轴承固定板t2.4连接,轴承固定板t2.4与支撑底板t1固定连接。本实施例中,减阻结构采用四组牛眼轮和八组转动轴承,一组牛眼轮至少包括28个牛眼轮t2.1,通过螺母固定到支撑底板上;一组转动轴承至少包括18个转动轴承t2.7、9个六面螺母t2.5、一块轴承固定板t2.4,转动轴承t2.7通过螺栓固定到轴承固定板t2.4上,轴承固定板t2.4通过六面螺母t2.5和螺栓固定到支撑底板t1上。一个存储结构对应一个限位结构。限位结构包括内圈限位板t2.6、外圈限位
板t2.2和转筒挡板t2.8。外圈限位板t2.2呈环形,固定在支撑底板t1上,且位于外圈减阻机构上。内圈限位板t2.6呈环形,置于外圈限位板t2.2内,利用螺栓固定在减阻结构的轴承固定板t2.4上,且位于内圈减阻机构上。内圈限位板t2.6、外圈限位板t2.2之间为存储结构的转筒单元t4的运动轨迹。转筒挡板t2.8与内圈限位板t2.6连接。在本实施例中,外圈限位板t2.2包括呈环形的环氧树脂板和呈圆柱形的3d打印支撑t2.3;3d打印件支撑t2.3的一端通过螺栓与环氧树脂板连接,另一端通过螺栓螺母与支撑底板t1连接。滑移结构t5包括滑轨和滑块,滑轨置于支撑底板t1上,滑块与拨动结构t3的支撑板t3.3连接,滑块能在滑轨上滑动。拨动结构t3包括支撑板t3.3、主动拨杆t3.1、从动拨杆t3.4。支撑板t3.3通过第一连杆t6与储存运输控制模块的储存运输电机t7连接,储存运输电机t7带动支撑板t3.3沿滑移结构t5滑动。主动拨杆t3.1套在主动拨杆光轴上,主动拨杆光轴的一端与储存运输控制模块的舵机t8连接,主动拨杆光轴的另一端与拨杆轴承座t3.2连接,拨杆轴承座t3.2与支撑板t3.3连接;舵机t8工作,带动主动拨杆t3.1运动,使主动拨杆t3.1呈水平状态或竖直状态。从动拨杆t3.4套在从动拨杆光轴上,从动拨杆光轴的两端分别与拨杆轴承座t3.2连接,拨杆轴承座t3.2与支撑板t3.3连接;从动拨杆t3.4上的齿与主动拨杆t3.1上的齿相适配;主动拨杆t3.1运动带动从动拨杆t3.4运动,使从动拨杆t3.4的状态与主动拨杆t3.1的状态相同(即同时处于水平状态或竖直状态),从而同时拨动2个存储结构的转筒单元t4。
152.储存运输控制模块包括储存运输电机t7、舵机t8、储存运输控制器。储存运输电机t7安设在支撑底板t1上,与储存运输控制器电连接。储存运输电机t7与第一连杆t6的一端连接,第一连杆t6的另一端通过固定铰支座t3.5与拨动结构的支撑板t3.3连接,储存运输电机t7驱动第一连杆t6运动,进而带动拨动结构沿滑移结构滑动。舵机t8安设在舵机座t3.6上,舵机座t3.6安设在支撑板t3.3上,舵机t8与储存运输控制器电连接。舵机t8控制拨动结构的主动拨杆t3.1工作,即使主动拨杆t3.1呈水平状态或竖直状态。拨动结构在储存运输控制模块的作用下,对2个存储结构的转筒单元t4同时进行拨动,使转筒单元t4沿着限位结构的限制轨迹进行运动,使转筒单元t4内的树苗沿着输出口输出。在较佳实施例中,储存运输电机t7、储存运输控制器可置于箱体内。
153.松土植树部有4个,通过安装平台2与履带移动车架1的4根车架立柱104上的松土种植固定板4固定连接(安装平台2通过松土种植固定支座1.5固定在松土种植固定板4上),松土种植固定板4上设有滑块,车架立柱1.4上设有升降滑轨1.2,松土种植固定板4通过滑块、滑轨沿车架立柱1.4滑动;同一侧的松土种植固定板4通过固定板连杆连接,固定板连杆上设有同步带安装板3;升降同步带5固定在同步带安装板3,松土植树升降电机6通过升降同步带5带动固定板连杆上下移动,进而带动松土植树部上下移动。
154.松土植树部包括种树单元、松土单元、松土植树控制模块。种树单元用于输送种植植物,其包括顶部平台p2、种树管道p10、阀门p12。种树管道的进口与储存运输平台7的支撑底板t1上的输出口相适配;种树管道p10穿过安装平台2、顶部平台p2后伸入翻转机构中,当翻转机构翻转后,种树单元才能实现种树。种树管道p10的上端通过管道固定打印件p1固定在顶部平台p2上;顶部平台p2下部与连接过渡件p16连接。种树管道p10的下端设有阀门p12,阀门p12通过管夹p7固定在种树管道p10上。管夹p7的内径与种树管道p10相等,厚度为2mm。阀门p12包括2个阀门侧板p12.1、阀门顶板p12.2、阀门本体p12.3、弹力带;2个阀门侧板p12.1分别位于阀门顶板p12.2的两侧,2个阀门侧板p12.1、阀门顶板p12.2、阀门本体
p12.3通过六面螺母进行固定;阀门本体p12.3置于种树管道p10的斜管口处,且该阀门本体p12.3与种树管道p10的斜管口相适配;2个阀门侧板p12.1、阀门顶板p12.2为环氧树脂板。每个阀门侧板p12.1的中部设有安装孔p12.1.1,尾部设有弹性带连接孔p12.1.2;管夹p7上的圆柱p7.1穿过安装孔p12.1.1后由螺母固定,阀门侧板p12.1能绕圆柱p7.1转动(阀门p12的旋转圆心便是圆柱p7.1圆心);弹力带的一端固定在一侧阀门侧板p12.1上的弹性带连接孔p12.1.2上,弹力带的另一端穿过管夹p7上的孔p7.2后,与另一侧的阀门侧板p12.1上的弹性带连接孔p12.1.2固定连接,保证阀门不受作用力的情况下闭合,当种树单元工作时,植物输送至种树管道p10后,阀门p12受到树苗重力压迫下打开,树苗掉落后再关闭。
155.松土植树控制模块包括翻转控制模块。翻转控制模块包括翻转控制平台2.2、翻转控制电机2.2.6、第一翻转光轴2.2.3、翻转齿轮组、第二翻转光轴、翻转同步轮、第一翻转同步带2.3、第二翻转同步带、第一翻转传动轴、第二翻转传动轴。翻转控制平台2.2通过翻转铜柱2.2.4与安装平台2连接,翻转控制电机2.2.6置于翻转控制平台2.2上,翻转控制电机2.2.6通过第一翻转光轴2.2.3与翻转齿轮组的第一翻转齿轮连接,第二翻转光轴与翻转齿轮组的第二翻转齿轮2.2.1连接,第二翻转齿轮2.2.1、第一翻转齿轮相啮合;第一翻转同步带2.3套在第一翻转光轴2.2.3上的翻转同步轮和第一翻转传动轴2.4上的翻转同步轮上;第二翻转同步带套在第二翻转光轴上的翻转同步轮和第二翻转传动轴上的翻转同步轮上;翻转传动轴(第一翻转传动轴2.4、第二翻转传动轴)的两端分别与同侧的两个翻转机构的翻转轴承座p15、侧板p9连接;第二翻转光轴置于翻转光轴轴承座2.2.2;翻转控制电机2.2.6工作,带动第一翻转光轴2.2.3转动,第一翻转光轴2.2.3带动第一翻转齿轮转动,第一翻转齿轮带动第二翻转齿轮2.2.1,第二翻转齿轮2.2.1带动第二翻转光轴转动,第一翻转光轴、第二翻转光轴分别带动第一翻转同步带2.3、第二翻转同步带运动,第一翻转同步带2.3、第二翻转同步带分别带动第一翻转传动轴2.4、第二翻转传动轴转动,第一翻转传动轴2.4带动同侧的两个翻转机构翻转,第二翻转传动轴带动同侧的两个翻转机构翻转。
156.松土单元用于对土壤进行松土,其包括翻转机构、钻头机构、电磁铁机构。翻转机构包括翻转轴承座p15、侧板p9和底板p17。翻转传动轴与轴承座p15、侧板p9的上端连接;翻转轴承座p15与种树单元的连接过渡件p16固定连接。侧板p9有2个,分别位于种树管道p10的两侧,且通过强度支撑件p14(铜柱、打印件、螺栓)连接;底板p17通过六面螺母固定在2个侧板p9下端。翻转控制电机带动翻转传动轴转动,翻转传动轴带动侧板、底板旋转。
157.钻头机构包括第二电机p11、钻头p13,第二电机p11安设在翻转机构的底板上;钻头p13的中心线与种树管道p10的中心线在同一条直线上。钻头p13为微型单头钻头,其中心轴直径为p8mm;第二电机p11为无刷p7字电机,其输出轴直径为5mm。控制模块控制第二电机p11工作,第二电机p11带动钻头p13进行松土作业。
158.电磁铁机构包括电磁铁p3、铁片p4。电磁铁p3安设在种树单元的连接过渡件p16上;铁片p4通过六面螺母p6安设在翻转机构的侧板p9上,当需要松土单元进行松土工作时,松土植树控制模块使电磁铁p3通电,电磁铁p3紧吸铁片p4;当需要种树单元工作时,电磁铁3断电,松土单元被驱动翻转。
159.松土植树控制模块控制翻转机构、钻头机构、电磁铁机构工作;当松土植树控制模块使电磁铁p3通电时,翻转机构的侧板和种树单元的连接过渡件p16固定,钻头机构的钻头p13进行松土作业;当松土植树控制模块使电磁铁p3断电时,松土植树控制模块控制翻转机
构进行翻转,松土植树控制模块控制种树单元进行种树作业。
160.土壤夯实单元9在无能耗的条件下完成土壤夯实,其包括两组压土轮组和一根土壤夯实连接杆c1,土壤夯实连接杆c1通过第二连杆固定在履带移动车架1的履带横向连接杆l3.1上。当然,可根据需要多设置几组压土轮组,以便能同时多压实几个种植点。
161.压土轮组包括两组对称设置的夯土轮单元c4。该夯土轮单元c4包括夯土轮c4.4、固定机构、拉簧机构。每个夯土轮c4.4分别通过固定机构与土壤夯实连接杆c1连接,使每个夯土轮c4.4与对称轴呈30
°
夹角;每个夯土轮c4.4对应一个拉簧机构。
162.固定机构包括对称设置的2个固定单元和8mm的轮子光轴c4.3。固定单元包括从外到内依次连接的固定侧板c4.2、支撑打印件c4.1、支撑光轴座c4.5,轮子光轴c4.3分别与固定单元的支撑光轴座c4.5连接。固定侧板c4.2上设有轴承c4.6;光轴c5的一端与压土轮组光轴座c2连接,另一端依次穿过压土轮组的固定侧板c4.2上的轴承c4.6后,与另一个压土轮组光轴座c2连接;两个压土轮组光轴座c2与土壤夯实连接杆c1连接。
163.本实施例中,支撑打印件c4.1的竖截面为直角梯形,直角梯形的直腰通过螺栓螺母与固定侧板c4.2连接,直角梯形的斜腰通过螺栓与支撑光轴座c4.5连接。在直角梯形的斜腰上,靠近下底边处被切去一角,形成一个竖直边;采用竖直边,以便于确保两个支撑打印件的平行度,以便更好的控制夯土轮c4.4的倾斜角度,从而稳定的完成夯土工作。
164.本实施例中,支撑打印件c4.1交错安装(一个支撑打印件c4.1的竖直边在上部,一个支撑打印件c4.1的竖直边在下部),以便使轮子光轴c4.3与水平面呈30
°
夹角。
165.本实施例中,拉簧机构包括张紧拉簧c3和拉簧固定件c6,张紧拉簧c3的一端固定在固定机构的固定侧板c4.2上,另一端与拉簧固定件c6连接,拉簧固定件c6通过螺栓和梯形螺母与土壤夯实连接杆c1连接。通过张紧拉簧c3以及拉簧固定件c6张紧,使得夯土轮c4.4能始终贴紧土地,起到夯土作用。
166.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。