1.本发明主要涉及环卫设备中垃圾压缩车控制系统相关技术领域,具体是一种遥控式垃圾压缩车电控系统及控制方法。
背景技术:
2.垃圾压缩车一般是采用专用汽车底盘改装形成的环卫装备,一般具有垃圾装载功能、垃圾卸载功能、垃圾单次压缩、垃圾连续压缩功能。目前压缩车电控系统通常设置尾部操作按钮盒总成、驾驶室操作盒总成、遥控装置等多种操作方式组合的方式,总体来讲目前这些操作方式操作复杂,电控系统线束结构繁杂、而且不易检修。在功能上来讲,传统的控制方案在垃圾卸载模式时不具备一键自动卸料与清理能力、在垃圾装载模式下不具备压缩与上料桶互锁的能力,导致上料时需要中断压缩,然后上料后再次触发压缩,操作不具备连续性。
技术实现要素:
3.为解决目前技术的不足,本发明结合现有技术,从实际应用出发,提供一种遥控式垃圾压缩车电控系统及控制方法,该电控系统所有压缩车功能仅需一个遥控器实现,而且在垃圾装载模式下的垃圾压缩动作具备与垃圾装载动作耦合,实现连续压缩与装载同步进行;具备维修模式下实现所有动作按照单步执行,提高检修效率。
4.本发明的技术方案如下:
5.一种遥控式垃圾压缩车电控系统,包括遥控器、上装控制器、多个用于检测垃圾压缩车动作的开关量传感器以及输出执行机构;
6.其中,垃圾压缩车需求动作输入均从遥控器发出,经由can方式传送至上装控制器,上装控制器基于收到的can报文数据,依据多个开关量传感器反馈信息,使对应的输出执行机构动作实现单次压缩、连续压缩、动作反转、填装器上升、填装器下降、上料桶提升、上料桶下降、填装器门开、填装器门关、推铲回收、推铲推出、维修模式单步动作、锁钩上锁、锁钩解锁、垃圾清理动作的分步执行。
7.进一步,所述开关量传感器与上装控制器之间通过硬线连接,所述输出执行机构与上装控制器通过硬线连接。
8.进一步,所述开关量传感器包括:锁开到位传感器、刮板开到位传感器、刮板关闭到位传感器、滑板上升到位传感器、滑板下降到位传感器、填装器上升到位传感器、填装器下降到位传感器、推铲回收到位传感器。
9.进一步,所述锁开到位传感器安装锁钩尾部,用于检测填装器锁锁紧状态;
10.所述刮板开到位传感器、刮板关闭到位传感器分别安装于刮板运动极限位置、滑板上升到位传感器、滑板下降到位传感器分别安装在滑板运动极限位置;
11.所以填装器上升到位传感器、填装器下降到位传感器安装与填装器运动极限位置,通过硬线与上装控制器连接,感应填装器举升和下降位置。
12.进一步,所述输出执行机构包括填装器下降阀、填装器举升阀、填装器上锁阀、填装器解锁阀、推铲推出阀、推铲回收阀、滑板下降阀、滑板上升阀、刮板闭合阀、刮板张开阀、提桶下降阀、提桶上升阀。
13.进一步,所述填装器下降阀、填装器举升阀、填装器上锁阀、填装器解锁阀、推铲推出阀、推铲回收阀、滑板下降阀、滑板上升阀、刮板闭合阀、刮板张开阀、提桶下降阀、提桶上升阀安装于驾驶室与垃圾箱体中间电磁阀控制柜中,上述电磁阀均受上装控制器实时控制。
14.进一步,所述遥控器包括上料模式以及卸料模式,上料模式下包括单次压缩、连续压缩、动作反转、上料桶提升、上料桶下降、填装器门开、填装器门关、锁钩上锁、锁钩解锁动作;卸料模式下包括填装器上升、填装器下降、推铲回收、推铲推出、垃圾清理动作;维修模式单步动作、锁钩上锁、锁钩解锁动作。
15.根据本发明另一方面,提供一种使用上述遥控式垃圾压缩车电控系统的控制方法,方法如下:
16.单次压缩、连续压缩动作为上装控制器按照刮板张开信号、滑板下降信号、刮板闭合信号、滑板上升信号顺序依次输出;并实时接收滑板上升到位传感器到位指令、滑板下降到位传感器指令、刮板关闭到位传感器指令、刮板开到位传感器指令;
17.动作反转动时上装控制器依次输出刮板张开信号、滑板上升信号;
18.维修模式单步动作是在维修模式下对每一个动作单独执行,此时遥控器所有按键为自复位按键,按下为输出状态,松开停止输出;
19.收到填装器上升指令和填装器下降指令时,上装控制器控制填装器上升阀和填装器下降阀打开,进而控制填装器升降缸工作;
20.收到推铲回收指令和推铲推出指令时,上装控制器控制推铲推出阀和推铲回收阀打开,进而控制推铲缸工作;
21.收到锁钩上锁指令和锁钩解锁指令时,上装控制器控制填装器上锁阀、填装器解锁阀打开,进而控制锁紧缸工作。
22.进一步,上料模式控制流程为:遥控器发送单次压缩请求,上装控制器根据请求指令,首先输出刮板张开信号,控制刮板张开阀打开,执行刮板张开动作,刮板到位传感器实时检测刮板刮到位情况,未到位继续输出刮板张开信号;刮板开到位后立即输出提桶上升信号,未到位继续输出提桶上升信号;提桶上升到位后立即输出滑板下降信号,未到位继续输出滑板下降信号;滑板下降到位信号后立即输出刮板闭合信号,未到位继续输出刮板闭合信号;刮板闭合到位之后立即输出滑板上升信号,未到位继续输出滑板上升信号,到位后完成单次压缩动作;
23.卸料模式控制流程为:遥控器发送填装器上升指令,上装控制器根据填装器上升请求指令,首先输出填装器解锁信号,控制填装器解锁阀打开,执行填装器解锁动作,锁开到位传感器实时检测填装器锁是否开到位,未开到位继续输出填装器解锁信号;填装器解锁到位后立即输出填装器举升信号,控制填装器举升阀打开,执行填装器举升动作,未到位继续输出填装器举升信号;填装器举升到位后进行一次垃圾清理工作,依次执行刮板打开、刮板闭合、滑板上升、滑板下降动作;完成垃圾清理工作后,输出推铲推出信号,完成垃圾卸载步骤。
24.本发明的有益效果:
25.本发明的电控系统及控制方法中,所有压缩车功能仅需一个遥控器即可实现,操作简单方便,而且在垃圾装载模式下的垃圾压缩动作具备与垃圾装载动作耦合,实现连续压缩与装载同步进行;具备维修模式下实现所有动作按照单步执行,提高检修效率。
附图说明
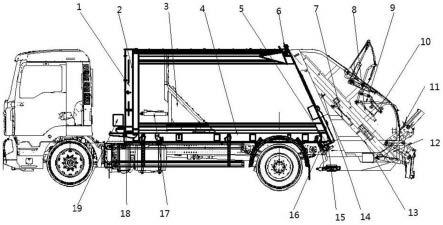
26.附图1是本发明的电器部件布置图。
27.附图2是本发明控制系统中部分电路连接图。
28.附图3是功能复用式遥控器原理图。
29.附图4是上料模式控制流程。
30.附图5是卸料模式控制流程。
31.附图中:1、遥控器模块;2、推铲回收到位传感器;3、推铲机构;4、填装器禁止下降开关;5、锁紧缸;6、填装器上升到位传感器;7、滑板缸;8、刮板缸;9、刮板开到位传感器;10、刮板关闭到位传感器;11、提桶举升油缸;12、提桶升到位传感器;13、滑板下降到位传感器;14、滑板上升到位传感器;15、填装器下降到位传感器;16、锁开到位传感器;17、推铲缸;18、上装控制器;19、电磁阀。
具体实施方式
32.结合附图和具体实施例,对本发明作进一步说明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
33.如图1-3所示,为本发明实施例所提供的一种遥控式垃圾压缩车电控系统相关结构示意图。
34.本系统主要的电气部件及执行结构主要包括图1所示的遥控器模块1;推铲回收到位传感器2;推铲机构3;填装器禁止下降开关4;锁紧缸5;填装器上升到位传感器6;滑板缸7;刮板缸8;刮板开到位传感器9;刮板关闭到位传感器10;提桶举升油缸11;提桶升到位传感器12;滑板下降到位传感器13;滑板上升到位传感器14;填装器下降到位传感器15;锁开到位传感器16;推铲缸17;上装控制器18;电磁阀19等。
35.其中上装控制器18作为控制核心处理所有遥控器发送的操作需求,根据各种传感器的反馈进行动作控制;遥控器具备所有垃圾压缩车的动作操作需求反馈功能,通过can通讯方式把操作需求发送上装控制器18;到位传感器可根据各个动作的实际位置进行限位反馈,上装控制器18根据此信息进行单次压缩、连续压缩、动作反转、填装器上升、填装器下降、上料桶提升、上料桶下降、填装器门开、填装器门关、推铲回收、推铲推出、维修模式单步动作、锁钩上锁、锁钩解锁、垃圾清理等动作的分步执行。在本系统中,仅通过一个遥控器可实现垃圾压缩车所有动作,且压缩车的动作检测通过对应的开关量传感器进行检测。
36.在本系统中,输出执行机构主要包括填装器下降阀、填装器举升阀、填装器上锁阀、填装器解锁阀、推铲推出阀、推铲回收阀、滑板下降阀、滑板上升阀、刮板闭合阀、刮板张开阀、提桶下降阀、提桶上升阀;无线遥控接收端通过can总线与上装控制器18连接;各传感器与上装控制器18通过硬线连接;电磁阀19与上装控制器18通过硬线连接。
37.如图1所示,上述上装控制器18安装在车辆驾驶室与后箱体之间的电控箱内部。上述无线遥控器的接收端与上装控制器18通过can总线连接。手持无线遥控器发送端具备压缩车所有功能控制请求,包括单次压缩、连续压缩、动作反转、填装器上升、填装器下降、上料桶提升、上料桶下降、填装器门开、填装器门关、推铲回收、推铲推出、维修模式单步动作、锁钩上锁、锁钩解锁、垃圾清理等动作的分步执行。
38.上述锁开到位传感器16安装锁钩尾部,用于检测填装器锁锁紧状态,通过硬线与上装控制器18连接。
39.上述刮板开到位传感器9、刮板关闭到位传感器10分别安装于刮板运动极限位置,滑板上升到位传感器14、滑板下降到位传感器13分别安装在滑板运动极限位置,通过硬线与上装控制器18连接共同执行压缩车压缩动作完成。
40.上述填装器上升到位传感器5、填装器下降到位传感器15安装于填装器运动极限位置,通过硬线与上装控制器18连接,感应填装器举升和下降位置。
41.上述填装器下降阀、填装器举升阀、填装器上锁阀、填装器解锁阀、推铲推出阀、推铲回收阀、滑板下降阀、滑板上升阀、刮板闭合阀、刮板张开阀、提桶下降阀、提桶上升阀安装于驾驶室与垃圾箱体中间电磁阀控制柜中,电磁阀18均受上装控制器18实时控制。
42.本发明使用的是功能复用式遥控器其原理图如图2所示,该遥控器在上料模式下包括单次压缩、连续压缩、动作反转、上料桶提升、上料桶下降、填装器门开、填装器门关、锁钩上锁、锁钩解锁动作;在卸料模式下包括填装器上升、填装器下降、推铲回收、推铲推出、垃圾清理动作;维修模式单步动作、锁钩上锁、锁钩解锁、等动作的分步执行。
43.上述遥控式垃圾压缩车的控制方法,如下:
44.一、单次压缩、连续压缩为上装控制器18按照刮板张开信号、滑板下降信号、刮板闭合信号、滑板上升信号顺序依次输出;并实时接收滑板上升到位传感器14到位指令、滑板下降到位传感器13指令、刮板关闭到位传感器10指令、刮板开到位传感器9指令;动作反转动时上装控制器18依次输出刮板张开信号、滑板上升信号。
45.二、上述单步动作是在维修模式下对每一个动作单独执行,此时遥控器所有按键为自复位按键,按下为输出状态,松开停止输出。
46.三、收到填装器上升指令和填装器下降指令时,上装控制器18控制填装器上升阀和填装器下降阀打开,进而控制填装器升降缸工作。
47.四、收到推铲回收指令和推铲推出指令时,上装控制器18控制推铲推出阀和推铲回收阀打开,进而控制推铲缸工作。
48.收到锁钩上锁指令和锁钩解锁指令时,上装控制器18控制填装器上锁阀、填装器解锁阀打开,进而控制锁紧缸工作。
49.本实施例控制逻辑中,上料模式控制流程如图4所示,功能复用遥控器发送单次压缩请求,上装控制器18根据请求指令,首先输出刮板张开信号,控制刮板张开阀打开,执行刮板张开动作,刮板关闭到位传感器10、刮板开到位传感器9实时检测刮板刮到位情况,未到位继续输出刮板张开信号;刮板开到位后立即输出提桶上升信号,未到位继续输出提桶上升信号;提桶上升到位后立即输出滑板下降信号,未到位继续输出滑板下降信号;滑板下降到位信号后立即输出刮板闭合信号,未到位继续输出刮板闭合信号;刮板闭合到位之后立即输出滑板上升信号,未到位继续输出滑板上升信号,到位后完成单次压缩动作。在上料
过程中上料桶与刮板、滑板动作关联,可实现在多循环压缩过程中持续上料。
50.本实施例控制逻辑中卸料模式控制流程如图5所示,功能复用遥控器发送填装器上升指令,上装控制器18根据填装器上升请求指令,首先输出填装器解锁信号,控制填装器解锁阀打开,执行填装器解锁动作,锁开到位传感器16实时检测填装器锁是否开到位,未开到位继续输出填装器解锁信号;填装器解锁到位后立即输出填装器举升信号,控制填装器举升阀打开,执行填装器举升动作,未到位继续输出填装器举升信号;填装器举升到位后进行一次垃圾清理工作,依次执行刮板打开、刮板闭合、滑板上升、滑板下降动作;完成垃圾清理工作后,输出推铲推出信号,完成垃圾卸载步骤。在卸料模式下填装器上升到位后会自动执行垃圾清理动作。
51.本实施例的电控系统级及控制方法,所有压缩车功能仅需一个遥控器实现,而且在垃圾装载模式下的垃圾压缩动作具备与垃圾装载动作耦合,实现连续压缩与装载同步进行;具备维修模式下实现所有动作按照单步执行,提高检修效率。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。