1.本发明属于履带车避障技术领域,具体为一种煤矿井下履带车避障学习方法。
背景技术:
2.现有生活中,煤矿是人类在富含煤炭的矿区开采煤炭资源的区域,一般分为井工煤矿和露天煤矿,当煤层离地表远时,一般选择向地下开掘巷道采掘煤炭,此为井工煤矿,当煤层距地表的距离很近时,一般选择直接剥离地表土层挖掘煤炭,此为露天煤矿,我国绝大部分煤矿属于井工煤矿,煤矿范围包括地上地下以及相关设施的很大区域,煤矿是人类在开掘富含有煤炭的地质层时所挖掘的合理空间,通常包括巷道、井硐和采掘面等等,煤是最主要的固体燃料,是可燃性有机岩的一种,它是由一定地质年代生长的繁茂植物,在适宜的地质环境中,逐渐堆积成厚层,并埋没在水底或泥沙中,经过漫长地质年代的天然煤化作用而形成的,而煤矿井是形成地下煤矿生产系统的井巷、硐室、装备、地面建筑物和构筑物的总称,煤矿井是工人需要对煤矿进行开发而挖掘的一种井道。
3.但是现有的煤矿井往往洞口较小,工作人员无法对错综复杂的煤矿井道进行勘测,这时,则需要履带车对煤矿深层进行勘测并提供检测数据,同时上传给地面上的操作人员,对矿井内的数据进行分析,若无法得到矿井内部的有效的真实数据,很容易对煤矿进行错误的判断与预测,极大的降低了工作人员的安全性,不利于实际的应用与操作。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供一种煤矿井下履带车避障学习方法,解决了背景技术中提到的问题。
5.为了解决上述问题,本发明提供了一种技术方案:
6.一种煤矿井下履带车避障学习方法,包括以下步骤:
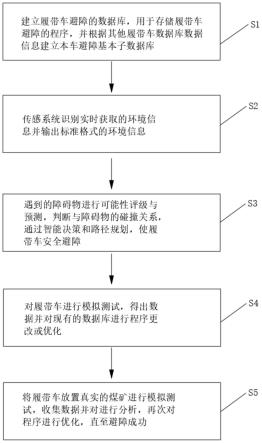
7.s1、建立履带车避障的数据库,用于存储履带车避障的程序,并根据其他履带车数据库数据信息建立本车避障基本子数据库,用于存储不同履带车在其他环境下的避障程序;
8.s2、履带车传感系统识别实时获取的环境信息,通过通讯电路传输至控制中心,控制中心对传感器数据进行分析,输出标准格式的环境信息;
9.s3、再对行驶过程中环境中的运动障碍物进行检测,由车载环境感知系统完成,再对行驶过程中可能遇到的障碍物进行可能性评级与预测,判断与障碍物的碰撞关系,通过智能决策和路径规划,使履带车安全避障,由履带车路径决策系统决定;
10.s4、同时对履带车进行模拟测试,模拟履带车在煤矿下的避障路径与表现,若避障效果不佳,将对履带车的数据库进行程序更改或优化,再次将履带车进行模拟测试,直至履带车避障率为100%;
11.s5、再将履带车放置真实的煤矿进行模拟测试,测试完毕后进行程序优化,直至履带车成功避险,目的让履带车适应煤矿下错综复杂的真实环境。
12.作为优选,所述步骤s1中建立大数据软件信息总数据库的具体操作步骤为:
13.s101、收集履带车避障的数据库,通过履带车数据中心收集所有的履带车类别信息以及各种类别下所有的履带车信息;
14.s102、分别建立所有避障信息数据库,将属于各分类下的避障信息统计入对应的履带车分类子数据层,形成履带车信息总数据库;
15.s103、对避障子数据层的首字母进行记录,并提取子数据库中各首字的首位英文字母,并按照英文字母顺序对其进行先后排列,将每个避障数据库中的首字母的英文归结在同一首字母的英文下,形成避障大数据库信息的字母索引,用于对数据库中的信息进行更改与优化,最后形成一个标准的避障数据库:
16.s111、分别对提取建立的各履带车数据库中的所有的避障信息,并记录各种履带车避障数据的首字母;
17.s112、并按照英文字母顺序分别对各种避障信息的首字的首位英文字母进行先后排列,将履带车数据中的信息首字母进行归纳,并在对应的避障信息下建立信息文件夹,形成避障基本子数据库;
18.s113、并利用各个避障数据库中信息首字的首位英文字母进行先后排序,在各个避障子数据库中形成索引。
19.作为优选,所述步骤s1中履带车避障的数据库与各个避障基本子数据库通过数据层级进行交互性连接。
20.作为优选,所述步骤s2中传感系统识别实时获取的环境信息的具体操作步骤为:
21.s21、传感系统包括超声波传感器、红外传感器、扩展编码器、视觉传感器、程序修改器和碰撞传感器,其中碰撞传感器与扩展编码器均为优先级传感器,用于处理避障情况下的;红外传感器、超声波传感器和视觉传感器均为低先级传感器,则是为当前路段进行检测距离与路径规划及类别进行相应处理的避障手段,以实现面对面实时的针对当下障碍物进行避障操作的步骤;而程序修改器是针对履带车经过检测后无法进行避障的必经手段,对无法避障的程序进行修改及优化,以实现避障的成功率达100%;
22.s22、根据通讯电路传送数据至控制中心,再由控制中心对避障数据进行分级分析,从而能够得到标准格式的环境信息,便于控制中心能够以此作为后面执行的标准。
23.作为优选,所述步骤s3中可能性评级与预测的具体操作步骤为:
24.s31、在车载系统感知系统下,将匹配好后的场景模型与标准化的避障数据库中的信息一一比对,从而对现有的行驶过程中履带车遇到的障碍进行评级与预测,若障碍物庞大,需要规划多重的行进路线且行程速度较慢则评级为s,若障碍物众多,行进路线需要交叉行进且中途需要进行多角度调节与多重感应的情况下评级a,若行驶过程中,道路平坦,翻越障碍物无需其他紧急处理措施则为b;
25.s32、同时履带车内部的感应系统会对此次路径进行预前规划与重组,为后面多重障碍路段作最有选择。
26.作为优选,所述步骤s4中对履带车进行模拟测试的具体操作步骤为:
27.结合现有的避障数据信息将对履带车在特定环境下进行行驶,并在障碍物模拟物中插入感应器,以及重力感应,当履带车行驶过程中对障碍物撞击的次数与力度,并将实时数据实时上传至避障大数据后台中,利用计算机算法对多次碰撞数据进行前后对比,重新
对履带车的程序进行优化与更改。
28.作为优选,所述步骤s5中的对履带车进行真实的模拟测试的具体操作步骤为:
29.在对模拟环境下履带车避障次数与撞击力度的基础上,再将履带车放置于真实的煤矿背景下进行模拟测试,感应系统会将此次的真实数据上传至云端,而感应系统会规划行进路径并运用于此次的行驶路程中,直至履带车避障完整通过。
30.本发明的有益效果是:本发明通过建立履带车避障数据库以及本车避障基本子数据库,同时在接收数据时,与数据库中的数据进行对比分析,从而筛选提取出与之符合的避障信息进行一一匹配,然后再将该数据录于该履带车系统中,同时对履带车进行多次模拟测试,得到模拟场景中,履带车的行驶数据、路径层级和碰撞次数及力度,不仅降低了履带车数据处理量,而且还避免了没有路径规划下履带车行驶路程较远且路程任务繁重,有利于实际的应用与操作。
附图说明:
31.为了易于说明,本发明由下述的具体实施及附图作以详细描述。
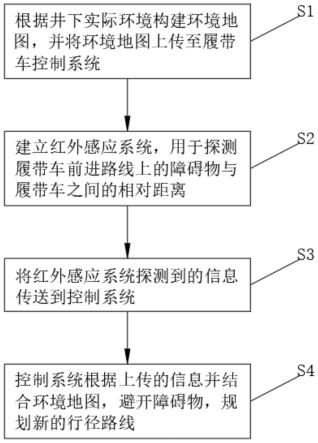
32.图1是本发明基于一种煤矿井下履带车避障学习方法流程示意图。
具体实施方式:
33.如图1所示,本具体实施方式采用以下技术方案:
34.实施例:
35.一种煤矿井下履带车避障学习方法,包括以下步骤:
36.s1、建立履带车避障的数据库,用于存储履带车避障的程序,并根据其他履带车数据库数据信息建立本车避障基本子数据库,用于存储不同履带车在其他环境下的避障程序,便于收集其他车型避障程序;
37.s2、履带车传感系统识别实时获取的环境信息,通过通讯电路传输至控制中心,控制中心对传感器数据进行分析,输出标准格式的环境信息,便于后面以此标准进行对此分析;
38.s3、再对行驶过程中环境中的运动障碍物进行检测,由车载环境感知系统完成,再对行驶过程中可能遇到的障碍物进行可能性评级与预测,判断与障碍物的碰撞关系,通过智能决策和路径规划,使履带车安全避障,由履带车路径决策系统决定,便于判断碰撞关系且规划优先路径;
39.s4、同时对履带车进行模拟测试,模拟履带车在煤矿下的避障路径与表现,若避障效果不佳,将对履带车的数据库进行程序更改或优化,再次将履带车进行模拟测试,直至履带车避障率为100%,便于收集数据并进行优化;
40.s5、再将履带车放置真实的煤矿进行模拟测试,测试完毕后进行程序优化,直至履带车成功避险,目的让履带车适应煤矿下错综复杂的真实环境,便于在真实情况下,检测履带车行驶数据。
41.其中,所述步骤s1中建立履带车避障的数据库的具体操作步骤为:
42.s101、收集履带车避障的数据库,通过履带车数据中心收集所有的履带车类别信息以及各种类别下所有的履带车信息,便于快速寻找信息类别;
43.s102、分别建立所有避障信息数据库,将属于各分类下的避障信息统计入对应的履带车分类子数据层,形成履带车信息总数据库,便于收集避障信息;
44.s103、对避障子数据层的首字母进行记录,并提取子数据库中各首字的首位英文字母,并按照英文字母顺序对其进行先后排列,将每个避障数据库中的首字母的英文归结在同一首字母的英文下,形成避障大数据库信息的字母索引,用于对数据库中的信息进行更改与优化,最后形成一个标准的避障数据库,便于后期进行数据更改及优化。
45.其中,所述步骤s1中建立避障基本子数据库的具体操作步骤为:
46.s111、分别对提取建立的各履带车数据库中的所有的避障信息,并记录各种履带车避障数据的首字母,便于数据记录及归纳;
47.s112、并按照英文字母顺序分别对各种避障信息的首字的首位英文字母进行先后排列,将履带车数据中的信息首字母进行归纳,并在对应的避障信息下建立信息文件夹,形成避障基本子数据库;
48.s113、并利用各个避障数据库中信息首字的首位英文字母进行先后排序,在各个避障子数据库中形成索引,便于后期更改信息。
49.其中,所述步骤s1中履带车避障的数据库与各个避障基本子数据库通过数据层级进行交互性连接。
50.其中,所述步骤s2中传感系统识别实时获取的环境信息的具体操作步骤为:
51.s21、传感系统包括超声波传感器、红外传感器、扩展编码器、视觉传感器、程序修改器和碰撞传感器,其中碰撞传感器与扩展编码器均为优先级传感器,用于处理避障情况下的;红外传感器、超声波传感器和视觉传感器均为低先级传感器,则是为当前路段进行检测距离与路径规划及类别进行相应处理的避障手段,以实现面对面实时的针对当下障碍物进行避障操作的步骤;而程序修改器是针对履带车经过检测后无法进行避障的必经手段,对无法避障的程序进行修改及优化,以实现避障的成功率达100%,便于对当前路段行驶数据进行对比及反馈;
52.s22、根据通讯电路传送数据至控制中心,再由控制中心对避障数据进行分级分析,从而能够得到标准格式的环境信息,便于控制中心能够以此作为后面执行的标准。
53.其中,所述步骤s3中可能性评级与预测的具体操作步骤为:
54.s31、在车载系统感知系统下,将匹配好后的场景模型与标准化的避障数据库中的信息一一比对,从而对现有的行驶过程中履带车遇到的障碍进行评级与预测,若障碍物庞大,需要规划多重的行进路线且行程速度较慢则评级为s,若障碍物众多,行进路线需要交叉行进且中途需要进行多角度调节与多重感应的情况下评级a,若行驶过程中,道路平坦,翻越障碍物无需其他紧急处理措施则为b,便于后期判断处理层级关系;
55.s32、同时履带车内部的感应系统会对此次路径进行预前规划与重组,为后面多重障碍路段作最有选择。
56.其中,所述步骤s4中对履带车进行模拟测试的具体操作步骤为:
57.结合现有的避障数据信息将对履带车在特定环境下进行行驶,并在障碍物模拟物中插入感应器,以及重力感应,当履带车行驶过程中对障碍物撞击的次数与力度,并将实时数据实时上传至避障大数据后台中,利用计算机算法对多次碰撞数据进行前后对比,重新对履带车的程序进行优化与更改,便于对多次碰撞数据进行前后对比,重新对程序进行优
化设定。
58.其中,所述步骤s5中的对履带车进行真实的模拟测试的具体操作步骤为:
59.在对模拟环境下履带车避障次数与撞击力度的基础上,再将履带车放置于真实的煤矿背景下进行模拟测试,感应系统会将此次的真实数据上传至云端,而感应系统会规划行进路径并运用于此次的行驶路程中,直至履带车避障完整通过,便于履带车规划合理的行驶路径。
60.具体的:在实际的应用中,首先建立履带车避障的数据库,用于存储履带车避障的程序,并根据其他履带车数据库数据信息建立本车避障基本子数据库,用于存储不同履带车在其他环境下的避障程序,对避障子数据层的首字母进行记录,并提取子数据库中各首字的首位英文字母,并按照英文字母顺序对其进行先后排列,将每个避障数据库中的首字母的英文归结在同一首字母的英文下,形成避障大数据库信息的字母索引,用于对数据库中的信息进行更改与优化,最后形成一个标准的避障数据库,并利用各个避障数据库中信息首字的首位英文字母进行先后排序,在各个避障子数据库中形成索引;
61.当履带车在模拟环境下进行行驶时,车载系统感知系统将匹配好后的场景模型与标准化的避障数据库中的信息一一比对,从而对现有的行驶过程中履带车遇到的障碍进行评级与预测,若障碍物庞大,需要规划多重的行进路线且行程速度较慢则评级为s,若障碍物众多,行进路线需要交叉行进且中途需要进行多角度调节与多重感应的情况下评级a,若行驶过程中,道路平坦,翻越障碍物无需其他紧急处理措施则为b;
62.同时履带车内部的感应系统会对此次路径进行预前规划与重组,为后面多重障碍路段作最优选择;
63.结合现有的避障数据信息将对履带车在特定环境下进行行驶,并在障碍物模拟物中插入感应器,以及重力感应,当履带车行驶过程中对障碍物撞击的次数与力度,并将实时数据实时上传至避障大数据后台中,利用计算机算法对多次碰撞数据进行前后对比,重新对履带车的程序进行优化与更改;最后在真实煤矿背景下再次进行测试,最终得到履带车此次行驶数据,操作人员对此进行数据分析优化,直至履带车避障完整通过。
64.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。