技术特征:
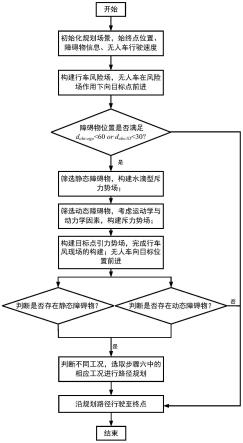
1.基于改进人工势场法的无人车局部实时避障路径规划方法,其特征在于:具体包括以下步骤:步骤一、针对履带式无人车所在的局部避障行驶环境,对车辆传感器检测到的障碍物分别进行筛选,基于障碍物与车辆之间的距离去除对车辆轨迹规划无影响的障碍物,然后评估剩余的静态和动态障碍物以及目标行驶目标点对轨迹规划的影响风险用于后续建立行车势场环境;步骤二、针对筛选的静态障碍物建立其对车辆的斥力势场函数模型,考虑车速与车辆—障碍物相对位置的夹角α对斥力势场进行改进,得到以下改进后的水滴形斥力势场函数模型u
rep
::式中,k
rep
为斥力势场正比例系数,d
obs
为车辆与静态障碍物距离,d0为障碍物对车辆产生斥力的最大影响范围,k
d
为调节因子,m
d
为常数;步骤三、针对筛选的动态障碍物建立其对车辆的斥力势场函数模型,考虑其与车辆的相对位置、相对速度以及相对加速度对斥力场进行改进,得到以下改进后的动态障碍物斥力势场函数u
rep
:式中,v
eo
为动态障碍物相对于车辆的相对速度,k
v
为相对速度比例系数,a
eo
为动态障碍物相对于车辆的相对加速度,k
a
为相对加速度比例系数,β为动态障碍物和车辆的相对速度与相对位置的夹角,γ为动态障碍物和自主车辆的相对加速度与相对位置的夹角;步骤四、针对行驶目标点建立其对车辆的引力势场函数模型;步骤五、利用所建立的斥力势场函数模型和引力势场函数模型计算车辆所受的引力与斥力,并由所述引力与斥力构建行车环境风险场势力函数模型;结合障碍物运动速度和方位设置动态路径规划周期、安全距离阈值、碰撞风险约束条件,以进行避障路径规划并实时滚动获取车辆位置与速度控制量;步骤六、进行避障工况试验,包括静态障碍物的换道避障、侧向动态障碍物的减速避障工况;利用贝塞尔曲线对所规划的避障路径中的车辆位置进行平滑处理,从而得到完整的无人车局部避障规划路径。
2.如权利要求1所述的方法,其特征在于:步骤一中对车辆传感器检测到的障碍物分别进行筛选具体包括以下过程:首先建立一条自我车辆到目标点的虚拟直线,记为l
st
,其表达式如下:其中,为直线l
st
的斜率,为直线l
st
的截距,(x
ego
,y
ego
)、(x
target
,y
target
)分别为车辆以及目标点的位置坐标;设障碍物到车辆的距离为d
obs-ego
,障碍物到直线l
st
的距离为d
obs-st
,d
obs-ego
与d
obs-st
的表达式如下:达式如下:其中,d
obs-ego
和d
obs-st
对应的安全阈值分别为d
obs-ego*
和d
obs-st*
。3.如权利要求2所述的方法,其特征在于:步骤四针对行驶目标点建立其对无人车的引力势场函数模型具体包括以下过程:设车辆在二维坐标系中的当前位置坐标为(x,y),目标点坐标为(x
g
,y
g
),则该引力势场函数u
att
的表达式为:式中,k
att
为为引力势场正比例系数,d
goal
为车辆当前位置坐标与目标点坐标之间的距离矢量,方向为从车辆指向目标点。4.如权利要求3所述的方法,其特征在于:步骤五中车辆所受的引力与斥力计算过程具体包括:对水滴形斥力势场函数模型u
rep
求导得到镜头障碍物对车辆的斥力函数:对于动态障碍物的斥力势场,将其看作由相对位置势场函数u
rep-d
、相对速度势场函数u
rep-v
、相对加速度势场函数u
rep-a
三部分构成,分别为:三部分构成,分别为:
对相对位置势场函数u
rep-d
求导得到相对位置斥力函数为:将车辆当前位置坐标为(x,y)由原坐标系转换到以动态障碍物位置坐标为原点,以障碍物和车辆相对速度方向为x轴的坐标系下,得到坐标(m,n),转换关系为:则相对速度势场函数u
rep-v
分别对位置和速度求导得到相对速度斥力函数为:分别对位置和速度求导得到相对速度斥力函数为:其中,相对速度斥力f
rep-v1
的大小与车辆和障碍物距离d
obs
有关,方向与车辆和障碍物的连线垂直;相对速度斥力f
rep-v2
的大小与相对速度有关,方向在车辆和障碍物的连线上;表示相应势场的梯度;相对速度势场函数u
rep-a
分别对位置和速度求导得到相对速度斥力函数为:分别对位置和速度求导得到相对速度斥力函数为:其中,相对加速度斥力f
rep-a1
的大小与车辆和障碍物距离d
obs
有关,方向与车辆和障碍物的连线垂直;相对加速度斥力f
rep-a2
的大小与相对加速度有关,方向在车辆和障碍物的连线上;
得到动态障碍物对车辆的总斥力为:将行驶目标对车辆的引力势场函数模型u
att
求导得到引力函数:5.如权利要求4所述的方法,其特征在于:步骤五中由目标点引力势场、镜头障碍物和动态障碍物斥力势场共同作用构成行车环境风险势场函数:u=u
att
∑u
rep
对其求导得到行车环境风险场势力函数模型:6.如权利要求1所述的方法,其特征在于:步骤五中采用以下形式的贝塞尔曲线对所规划的避障路径中的车辆位置进行平滑处理:其中,p(s)为控制点,s为变量,p(i)代表位置点坐标,b
i,n
(s)为n次伯恩斯坦多项式,可表示为:式中,n表示贝塞尔曲线的阶数,位置点个数为n 1,控制点个数为n-1。
技术总结
本发明提供了一种基于改进人工势场法的无人车局部实时避障路径规划方法,其通过改进人工势场法静态障碍物的斥力势场函数,加入改进的距离调节因子,构建了水滴形斥力势场,可显著提高路径规划的精度与效率。方法在路径规划过程中,考虑了车辆运动学与动力学影响因素,在动态障碍物势场函数中加入了相对速度函数、相对加速度函数,解决了传统势场法对于动态避障工况无解的问题,规划的路径实时性和平顺性较好。通过对道路环境中存在复杂动态障碍物的工况进行分析,分别针对静态障碍物进行换道避障,针对侧向动态障碍物进行减速避障,规划算法静态规划效率高,且在动态规划中也有较高的适用性和有效性。高的适用性和有效性。高的适用性和有效性。
技术研发人员:翟丽 刘畅 张雪莹
受保护的技术使用者:北京理工大学
技术研发日:2022.09.05
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。