1.本发明属于结构轻量化设计与优化技术领域,具体涉及一种新型高刚度高强度高韧性点阵的设计方法。
背景技术:
2.桁架式点阵结构具有高比强度、高比刚度、高能量吸收和轻质等许多优异的力学性能,广泛应用于航空航天、武器弹药、生物医学、车辆工程、运动装备等诸多领域。增材制造技术的发展为桁架点阵提供了更大的设计空间。
3.然而,现阶段对桁架点阵的优化设计存在如下难点:一是大部分优化设计的依据源于仿生机理、设计经验或仿真结果,对点阵结构系统的理论性的优化机理推导较少,难以获得理论意义上的某性能最优的点阵结构;二是由于强度、刚度及韧性三者之间固有的制衡关系,导致在优化设计时,往往只能对其中一个或两个性能进行提升,其余性能下降,即难以实现刚度、强度及韧性的全面提升。
技术实现要素:
4.本发明所要解决的技术问题是针对上述现有技术的不足,提供一种新型高刚度高强度高韧性点阵的设计方法,基于所推导的桁架点阵单向压缩模量计算公式,获得模量最大时的倾角。对传统桁架点阵基于该倾角进行倾斜优化以使单向刚度最大化。同时,为了避免因倾斜设计导致其余方向刚度损失的问题,取倾斜点阵局部进行镜像及组合设计。镜像组合结构的中心单元,即为高强度、刚度、韧性的新型点阵结构,获得了一种对传统桁架点阵的通用优化方法,对传统桁架点阵均有效,可解决传统设计理论薄弱,经验及仿真依赖性强的缺点。
5.为实现上述技术目的,本发明采取的技术方案为:
6.一种新型高刚度高强度高韧性点阵的设计方法,包括:
7.s1:建立需要优化的传统桁架点阵结构作为初始点阵结构;
8.s2:推导初始点阵结构单向刚度与倾斜角度的计算公式;
9.s3:利用所推导的公式计算出初始点阵结构单向刚度最大时的最佳倾斜角度;
10.s4:对初始点阵结构基于最佳倾角进行倾斜变换,获得单向刚度最大化的倾斜优化点阵结构;
11.s5:对倾斜优化点阵结构取其1/4并进行镜像及组合设计,获得镜像组合改进结构,以保证单向刚度最大的前提下,弥补其余方向刚度损失;
12.s6:对镜像组合改进结构提取中心单元,得到新型点阵单胞;
13.s7:对新型点阵单胞进行阵列,得到新型点阵结构;
14.s8:输出s7得到的新型点阵结构。
15.为优化上述技术方案,采取的具体措施还包括:
16.上述的s1构建需要优化的传统桁架点阵结构,包括确定点阵类型,单胞尺寸,点阵
规模,相对密度,杆径,结构所用材料的弹性模量ec,泊松比υ,密度ρ,结构底端完全固定,顶端受竖直向下的位移载荷p。
17.上述的s2中推导初始点阵结构单向刚度与倾斜角度的计算公式的过程如下:
18.(1)对点阵结构进行受力分析,对受压后得到的倾斜点阵中的各杆,按受力不同进行分类,并求得各类杆的变形力;
19.(2)根据受力求出应力,根据变形求出应变;
20.(3)根据应力、应变求出单向压缩刚度,得到单向刚度与倾斜角度的计算公式。
21.上述的s2中,初始点阵结构为sc-bcc点阵时,单向刚度e
sc-bcc
与倾斜角度α的计算公式e
sc-bcc
=f(α)的推导过程如下:
22.(a)对受压后的倾斜点阵中的各杆,按受力不同进行分类,并求得各类杆的变形力:
[0023][0024][0025][0026][0027]
(b)根据受力求出应力,根据变形求出应变:
[0028][0029][0030]
(c)根据应力、应变求出单向压缩刚度:
[0031][0032]
代入得:
[0033][0034]
其中,f
12
、f
15
、f
17
、f
53
分别为杆12、杆15、杆17、杆53受压缩后的变形力;i为圆杆转动惯量;δ为各杆受压缩后的应变;ec为基材弹性模量;r为杆半径;d为杆直径;α为倾斜角度;γ1、γ2、γ3分别为不同杆的空间角,与倾斜角度α有关;l
12
、l
15
、l
17
、l
53
分别为杆12、杆15、杆17、杆53的杆长;σ为点阵整体等效应力;a为点阵受压缩方向截面面积;ε为点阵整体
等效应变;h为点阵受压缩方向初始高度;e为压缩方向等效弹性模量;e
sc-bcc
为sc-bcc点阵结构倾斜α角度后的压缩方向等效弹性模量;l为初始点阵杆长;le为倾斜点阵等效杆长。上述的(c)中空间角γ1、γ2、γ3采用空间坐标法获得,倾斜点阵等效杆长le利用立体几何法获得:
[0035][0036][0037][0038][0039]
上述的s5取倾斜点阵1/4进行镜像及组合设计,获得镜像组合改进结构,并保证阵列规模n
×n×
n中n≥n’,n’的取值由初始点阵结构点阵规模n
’×n’×
n’得到,且n为偶数;
[0040]
镜像后的各部分组合采用布尔并运算,该运算将所取的倾斜点阵的1/4部分与其镜像后的部分沿镜像面合并到一起,得到一个完整的镜像组合改进结构,并采用结构孪晶面个数n
tb
来评价性能提升效果。
[0041]
上述的s6对镜像组合改进结构提取中心单元,中心单元具体提取方法为:以镜像组合改进结构中心点为基准进行正方形框选,正方形边长为a:
[0042][0043]
其中,l
imp
为镜像组合改进结构边长;n即上述阵列规模n
×n×
n中的n。
[0044]
上述的s7对新型点阵单胞进行阵列,阵列数为n,n=n/2,即获得新型点阵结构,其孪晶面个数n
tb
为2n。
[0045]
本发明具有以下有益效果:
[0046]
本发明通过从理论角度推导传统桁架点阵的单向压缩模量—倾角的计算公式e=f(α),求得单向压缩模量最大时的倾角,对点阵作基于该倾角的倾斜设计以使单向刚度最大化;其次,通过镜像组合设计,增加结构孪晶面个数进而增强结构稳定性,实现保证单向刚度最大化的同时,消除由于倾斜导致结构其余方向力学性能损失的缺陷;最后取结构中心单元进行阵列,获得新型点阵结构,新型点阵结构进一步增加了结构孪晶面个数,相比初始点阵结构实现了刚度、强度及韧性的全面提升。
[0047]
本发明推导出了传统桁架点阵刚度计算一般公式,创新性地引入倾角变量,基于公式实现单向刚度优化,提高了设计效率;解决了因倾斜设计导致的其余方向刚度损失的问题,实现三维意义上的刚度提升;提出了获得高强度、刚度、韧性的新型点阵结构的方法,新型点阵结构实现了对传统结构强度、刚度、韧性的全面性能提升。
附图说明
[0048]
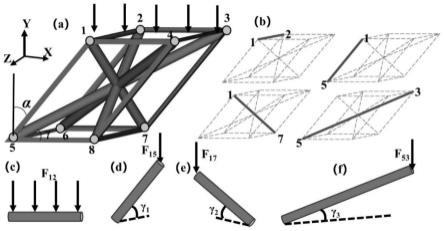
图1为受压后的倾斜点阵中的各杆受力分析图。
[0049]
图2为本发明的流程图。
[0050]
图3为等效杆长le示意图。
[0051]
图4为基于最佳倾角的倾斜设计过程图。
[0052]
图5为镜像组合设计获取镜像组合改进结构过程图。
[0053]
图6为提取中心单元进行阵列获取新型点阵结构过程图。
[0054]
图7为利用本发明方法得到的几种新型点阵结构图。
具体实施方式
[0055]
以下结合附图对本发明的实施例作进一步详细描述。
[0056]
一种新型高刚度高强度高韧性点阵的设计方法,包括:
[0057]
s1:建立需要优化的传统桁架点阵结构作为初始点阵结构;
[0058]
构建需要优化的传统桁架点阵结构,包括确定点阵类型,单胞尺寸,点阵规模,相对密度,杆径,结构所用材料的弹性模量ec,泊松比υ,密度ρ,结构底端完全固定,顶端受竖直向下的位移载荷p。
[0059]
s2:推导初始点阵结构单向刚度与倾斜角度的计算公式;过程如下:
[0060]
(1)对点阵结构进行受力分析,对受压后得到的倾斜点阵中的各杆,按受力不同进行分类,并求得各类杆的变形力;
[0061]
(2)根据受力求出应力,根据变形求出应变;
[0062]
(3)根据应力、应变求出单向压缩刚度,得到单向刚度与倾斜角度的计算公式。
[0063]
初始点阵结构为sc-bcc点阵时,单向刚度e
sc-bcc
与倾斜角度α的计算公式e
sc-bcc
=f(α)的推导过程如下:
[0064]
(a)对受压后的倾斜点阵中的各杆,按受力不同进行分类,并求得各类杆的变形力:
[0065][0066][0067][0068][0069]
(b)根据受力求出应力,根据变形求出应变:
[0070]
[0071][0072]
(c)根据应力、应变求出单向压缩刚度:
[0073][0074]
代入得:
[0075][0076]
其中,f
12
、f
15
、f
17
、f
53
分别为杆12、杆15、杆17、杆53受压缩后的变形力;i为圆杆转动惯量;δ为各杆受压缩后的应变;ec为基材弹性模量;r为杆半径;d为杆直径;α为倾斜角度;γ1、γ2、γ3分别为不同杆的空间角,与倾斜角度α有关;l
12
、l
15
、l
17
、l
53
分别为杆12、杆15、杆17、杆53的杆长;σ为点阵整体等效应力;a为点阵受压缩方向截面面积;ε为点阵整体等效应变;h为点阵受压缩方向初始高度;e为压缩方向等效弹性模量;e
sc-bcc
为sc-bcc点阵结构倾斜α角度后的压缩方向等效弹性模量;l为初始点阵杆长;le为倾斜点阵等效杆长。上述推导以sc-bcc点阵为例,但该过程对桁架点阵均通用,可以获得任意初始点阵结构单向刚度e与倾斜角度α的计算公式e=f(α)。
[0077]
空间角γ1、γ2、γ3采用空间坐标法获得,倾斜点阵等效杆长le利用立体几何法获得:
[0078][0079][0080][0081][0082]
s3:利用所推导的公式计算出初始点阵结构单向刚度最大时的最佳倾斜角度;
[0083]
s4:对初始点阵结构基于最佳倾角进行倾斜变换,获得单向刚度最大化的倾斜优化点阵结构;
[0084]
s5:对倾斜优化点阵结构取其1/4并进行镜像及组合设计,获得镜像组合改进结构,以保证单向刚度最大的前提下,弥补其余方向刚度损失;
[0085]
取倾斜点阵1/4进行镜像及组合设计,获得镜像组合改进结构,并保证阵列规模n
×n×
n中n≥n’,n’的取值由初始点阵结构点阵规模n
’×n’×
n’得到,且n为偶数;
[0086]
镜像后的各部分组合采用布尔并运算,该运算将所取的倾斜点阵的1/4部分与其镜像后的部分沿镜像面合并到一起,得到一个完整的镜像组合改进结构,并采用结构孪晶
面个数n
tb
来评价性能提升效果;
[0087]
镜像组合改进结构孪晶面个数n
tb
为2。
[0088]
s6:对镜像组合改进结构提取中心单元,得到新型点阵单胞;
[0089]
对镜像组合改进结构提取中心单元,其提取准则为保证提取后的中心单元为镜像组合改进结构中最大重复单元。
[0090]
对镜像组合改进结构提取中心单元,中心单元具体提取方法为:以镜像组合改进结构中心点为基准进行正方形框选,正方形边长为a:
[0091][0092]
其中,l
imp
为镜像组合改进结构边长;n即为列规模n
×n×
n中的n。
[0093]
中心单元孪晶面个数n
tb
为2。
[0094]
s7:对新型点阵单胞进行阵列,得到新型点阵结构,新型点阵结构相比初始点阵结构刚度、强度及韧性均有所提高;
[0095]
对新型点阵单胞进行阵列,新型点阵单胞边长为初始点阵的两倍,故为了保证阵列后点阵总尺寸一致,此处新型点阵的阵列数n=n/2,n即为所述阵列规模n
×n×
n中的n。获得的新型点阵结构孪晶面个数n
tb
为2n。理论上,相同设计空间内,其余条件一致的情况下,n越大,则n
tb
越多,则结构机械性能提升效果越好。
[0096]
s8:输出s7得到的新型点阵结构,即为新型高刚度、高强度、高韧性点阵结构。
[0097]
实施例1
[0098]
如背景技术中所述,现有的点阵优化及设计方法,对经验及仿真结果依赖性强,难以实现性能的全面改善。为了解决上述问题,本发明实施例提供了一种获得新型高刚度高强度高韧性点阵的设计方法,如图2所示,图2为本发明的流程图。
[0099]
具体的:下面以sc-bcc点阵优化为例说明本发明。
[0100]
s1:构建sc-bcc点阵,单胞尺寸为10mm
×
10mm
×
10mm,点阵规模为6
×6×
6,相对密度为27%,杆径为1mm,结构所用材料的弹性模量ec为2136mpa,泊松比υ为0.41,密度ρ为1.38e-9g/mm3,结构底端完全固定,顶端受竖直向下的位移载荷p=2.5mm。
[0101]
s2:基于上述建立的模型及边界、载荷条件,对点阵结构进行受力分析,如图1所示。首先对受压后的倾斜点阵中的各杆,按受力不同进行分类,并求得各类杆的变形力:
[0102][0103][0104]
[0105][0106]
接着根据受力求出应力,根据变形求出应变:
[0107][0108][0109]
最后根据应力应变求出单向压缩刚度:
[0110][0111]
代入得:
[0112][0113]
其中,f
12
、f
15
、f
17
、f
53
分别为杆12、杆15、杆17、杆53受压缩后的变形力;i为圆杆转动惯量;δ为各杆受压缩后的应变;ec为基材弹性模量;r为杆半径;d为杆直径;α为倾斜角度;γ1、γ2、γ3分别为不同杆的空间角,与倾斜角度α有关;l
12
、l
15
、l
17
、l
53
分别为杆12、杆15、杆17、杆53的杆长;σ为点阵整体等效应力;a为点阵受压缩方向截面面积;ε为点阵整体等效应变;h为点阵受压缩方向初始高度;e为压缩方向等效弹性模量;e
sc-bcc
为sc-bcc点阵结构倾斜α角度后的压缩方向等效弹性模量;l为初始点阵杆长;le为倾斜点阵等效杆长。
[0114]
如图3,根据立体几何法求得等效杆长:
[0115][0116]
如图1,根据空间坐标法求得空间角γ1、γ2、γ3:
[0117][0118][0119][0120]
s3-s4:利用s2推导的公式e
sc-bcc
=f(α),求得sc-bcc点阵单向压缩模量最大时的最优倾角α,对sc-bcc作基于该倾角的倾斜设计,如图4。
[0121]
s5:对倾斜优化点阵取其1/4并进行镜像及组合设计,获得镜像组合改进结构,改进结构相对密度及阵列规模与初始sc-bcc点阵一致,如图5。
[0122]
s6-s7:对镜像组合改进结构提取中心单元,获得新型点阵单胞,再对新型点阵单
胞进行阵列,即获得新型点阵结构,新型点阵结构相对密度与结构尺寸与初始sc-bcc点阵一致,如图6。
[0123]
s8:输出上述新型点阵结构。图7为利用本发明方法输出的四种新型点阵结构。
[0124]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。