1.本发明涉及航天器姿态控制技术领域,尤其涉及一种在轨航天器纯三轴磁控方法。
背景技术:
2.航天器研制技术的飞速发展使一大批飞行器姿态控制相关的控制理论和控制执行器件被应用到实际的工程中。在传统航天器在轨操控任务中,通常使用惯性推力进行相对运动控制,推进剂储量会影响航天器在轨工作能力和寿命。另一方面,惯性推力存在羽流污染,对光学测量设备等存在干扰隐患。因此,利用地磁场来控制航天器姿态作为一种既简单又可靠的方法开始引起人们的关注,该方法特别适合处于地磁场强度较强区域的地球低轨道航天器姿态控制系统。同时,考虑到作为执行机构的磁力矩器具有质量轻、能耗低、结构简单、可靠性高等优点,越来越多的航天器都把磁力矩器用在航天器的姿态控制系统中。
3.然而,现有大部分研究是通过将磁力矩器与飞轮组合使用的方法实现航天器姿态控制,采用纯磁控方法进行航天器姿态控制的相关研究则较少。同时,在以往的研究中,磁力矩器主要应用于低精度稳定、动量交换装置卸载及航天器去翻滚控制等情况。随着航天器技术和应用的飞速发展,简单、可靠的磁力矩器用于航天器姿态控制系统的需求将会越来越大。资料显示,在已发射的小卫星中,有2/3的小卫星都把磁力矩器用于卫星的姿态控制系统中,在航天器对接分离、在轨组装、编队飞行、故障航天器救援和废弃航天器离轨等领域具有广泛应用前景。因此,加强性能优异、可靠性高的纯磁控算法研制工作,并进行纯磁控算法的可控性分析具有重要的研究意义。
技术实现要素:
4.本发明提供了一种在轨航天器纯三轴磁控方法,包括以下步骤:
5.步骤1:给出纯磁控条件下航天器执行器力矩方程。
6.步骤2:给出航天器姿态运动学和姿态误差运动学模型。
7.步骤3:在步骤1和步骤2的基础上,构建纯磁控条件下的姿态控制器使执行机构输出控制力矩并施加在航天器姿态误差动力学模型上完成姿态控制。
8.作为本发明的进一步改进,在所述步骤1中,所述的磁力矩器力矩方程为:
9.t=m
×bꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
10.其中m是磁力矩器通过控制线圈中的电流来产生指定方向的磁偶极矩,磁偶极矩与地球磁场相互作用,产生与地球磁场b矢量垂直的控制外力矩t。
11.作为本发明的进一步改进,在所述步骤2中,考虑到纯磁控算法中磁力矩器的特殊性,采取了如下设置:
12.u=[u1,u2,u3]
t
,|ui|≤0.005n
·mꢀꢀ
i=1,2,3
ꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0013]
其中,u表示控制力矩,i的值1,2,3分别对应磁力矩器输出力矩在体坐标系x轴,y轴,z轴方向上的分量。。
[0014]
作为本发明的进一步改进,在所述步骤2中,还包括:
[0015]
步骤2.1,给出的航天器姿态运动学模型为:
[0016][0017][0018]
其中,表示固定坐标系相对于惯性坐标系姿态方向的单位四元数,r4表示四维向量,q0为姿态四元数的实数部分,q为四元数的虚数部分,并且满足ω表示在固定坐标系中表示的角速度,j表示对称惯性矩阵,u表示航天器受到的控制力矩,d表示航天器受到的外部干扰,ω
x
表示坐标角速度的叉乘矩阵形式,ω表示航天器的三轴角速度,u为控制输入,i3表示三阶单位矩阵。
[0019]
步骤2.2,给出的航天器姿态误差运动学模型为:
[0020][0021][0022]
其中,表示误差四元数,其中r4表示误差四元数是一个四维数,包括一个实部和三个虚部,其中q
e0
表示误差四元数的实部,qe表示误差四元数的虚部,ωe=ω-rωd表示角速度误差,wd表示角速度的期望值,表示角速度期望值的导数值,j表示卫星的转动惯量,u为控制输入,r表示旋转矩阵,定义为:
[0023][0024]
作为本发明的进一步改进,在所述步骤2.1中,所使用的航天器模型转动惯量为j=[1966.7 1160 2903.3 727.8-106.3 47.1];初始角速度为w0=[0 0 0]
°
/s;初始欧拉角为初始欧拉角euler0=[0 0 0]
°
;初始轨道六根数为elements0_up=[7179910,0,86,0,0,0]。
[0025]
作为本发明的进一步改进,还包括:
[0026]
步骤3.1,对控制器相关情况做出假设;
[0027]
假设1:ωd和始终有界并且满足||ωd||≤ξ1,其中ξ1,ξ2为两个正常数。
[0028]
假设2:对于转动惯量矩阵j,存在jm>0和jm>0,使得
[0029]jm
i3×3≤j≤jmi3×3ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0030]
其中jm和jm为转动惯量矩阵的下界和上界,为两个常数矩阵,i
3x3
表示三阶单位矩阵。
[0031]
步骤3.2,引入非线性饱和函数向量
[0032][0033]
其中表示任意一个三维列向量z,ε为正常数。
[0034]
步骤3.3,给出纯磁控航天器姿态控制器
[0035][0036]
其中k1,k2是可选择的正常数。
[0037]
作为本发明的进一步改进,在所述3.2中,常数ε>0,通过调节参数ε的大小可以改变函数向量φ(z,ε)的梯度值,从而实现控制有界又能提高系统响应速度的目的,φ(z,ε)关于z连续可微,并且满足如下性质:
[0038]-φ(z,ε)=φ(-z,ε),||φ(z,ε)||≤1
ꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0039][0040]
对于任意的坐标转换矩阵d,有
[0041]
φ(dz,ε)=dφ(z,ε)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0042]
作为本发明的进一步改进,在所述步骤3.3中,k1=50,k2=500,ε=13。
[0043]
本发明的有益效果是:1.本发明的在轨航天器纯三轴磁控方法可只利用磁力矩器提供相比传统推力设备较小的力矩实现航天器姿态的精确调整,稳态误差较小;2.本发明的在轨航天器纯三轴磁控方法提高了磁控航天器系统的安全性与可靠性。
附图说明
[0044]
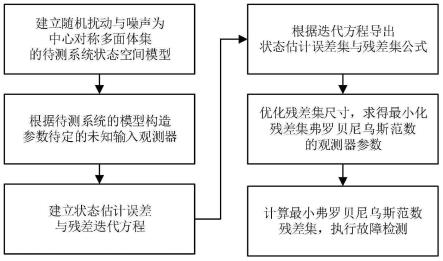
图1是本发明所用方法的流程图;
[0045]
图2是本发明所设计条件下的姿态角变化图;
[0046]
图3是本发明所设计条件下的姿态角速度示意图;
[0047]
图4是本发明所设计条件下磁力矩器提供的控制力矩示意图。
具体实施方式
[0048]
如图1所示,本发明公开了一种在轨航天器纯三轴磁控方法,包括以下步骤:
[0049]
步骤1:给出纯磁控条件下航天器执行器力矩方程。
[0050]
所述的磁力矩器力矩方程为:
[0051]
t=m
×bꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0052]
磁力矩器的本质是一个可控的电磁线圈,可分为空芯磁力矩器和磁芯磁力矩器两类。空芯磁力矩器具有制作简单、成本低、剩磁小、质量和功耗小等优点,其缺点在于产生的磁矩较小。磁芯磁力矩器在工作磁矩、体积、质量及安装方式等方面有明显的优点,缺点在于对磁棒的要求高,制作成本高,质量和功耗大。磁力矩器的工作原理都是利用其自身产生的磁矩与地球磁场相互作用从而产生控制航天器姿态的磁力矩。具体表现为:磁力矩器通过控制线圈中的电流来产生指定方向的磁偶极矩m,磁偶极矩与地球磁场相互作用,产生与地球磁场矢量b垂直的控制外力矩t。
[0053]
由于质量、体积、能耗、剩磁、磁性材料、线圈形状匝数和通入电流大小等方面的限
制,磁力矩器可以生成的磁偶极矩是存在峰值约束的,即
[0054]
|m|≤m
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0055]
式中,m
max
表示最大磁偶极矩。
[0056]
因此与传统的推力设备不同,单纯使用磁力矩器所提供的控制力矩小。力矩大小在千分之五以内。即:
[0057]
u=[u1,u2,u3]
t
,|ui|≤0.005n
·mꢀꢀ
i=1,2,3
ꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0058]
其中,u表示控制力矩,i的值1,2,3分别对应磁力矩器输出力矩在体坐标系x轴,y轴,z轴方向上的分量。
[0059]
步骤2:给出航天器姿态运动学和姿态误差运动学模型。
[0060]
步骤2.1给出的航天器姿态运动学模型为:
[0061][0062][0063]
其中,表示固定坐标系相对于惯性坐标系姿态方向的单位四元数,r4表示四维向量,q0为姿态四元数的实数部分,q为四元数的虚数部分,并且满足ω表示在固定坐标系中表示的角速度,j表示对称惯性矩阵,u表示航天器受到的控制力矩,d表示航天器受到的外部干扰,ω
x
表示坐标角速度的叉乘矩阵形式,ω表示航天器的三轴角速度,i3表示三阶单位矩阵。
[0064]
本发明所使用的航天器转动惯量为j=[1966.7 1160 2903.3 727.8
ꢀ‑
106.3 47.1];初始角速度为w0=[0 0 0]
°
/s;初始欧拉角为初始欧拉角euler0=[0 0 0]
°
;初始轨道六根数为elements0_up=[7179910,0,86,0,0,0]。
[0065]
步骤2.2给出的航天器姿态误差运动学模型为:
[0066][0067][0068]
其中,表示误差四元数,其中r4表示误差四元数是一个四维数,包括一个实部和三个虚部,其中q
e0
表示误差四元数的实部,qe表示误差四元数的虚部,ωe=ω-rωd表示角速度误差,wd表示角速度的期望值,表示角速度期望值的导数值,j表示卫星的转动惯量,u为控制输入,r表示旋转矩阵,定义为:
[0069][0070]
其中,表示误差四元数实部的平方。
[0071]
步骤3:在步骤1和步骤2的基础上,构建纯磁控条件下的姿态控制器使执行机构输
出控制力矩并施加在航天器姿态误差动力学模型上完成姿态控制。
[0072]
步骤3.1对控制器相关情况做出假设
[0073]
假设1:ωd和始终有界并且满足||ωd||≤ξ1,其中ξ1,ξ2为两个正常数。
[0074]
假设2:对于转动惯量矩阵j,存在jm>0和jm>0,使得
[0075]jm
i3×3≤j≤jmi3×3ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0076]
其中jm和jm为转动惯量矩阵的下界和上界,为两个常数矩阵,i
3x3
表示三阶单位矩阵。
[0077]
步骤3.2引入非线性饱和函数向量
[0078][0079]
其中表示任意一个三维列向量z,ε为正常数。
[0080]
这里,常数ε>0。通过调节参数ε的大小可以改变函数向量φ(z,ε)的梯度值,从而实现控制有界又能提高系统响应速度的目的。φ(z,ε)关于z连续可微,并且满足如下性质:
[0081]-φ(z,ε)=φ(-z,ε),||φ(z,ε)||≤1
ꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0082][0083]
对于任意的坐标转换矩阵d,有
[0084]
φ(dz,ε)=dφ(z,ε)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0085]
ε本身是个常数,但是是可以调节的常数,就是说一旦选定不许变,这是个常数,但是在选定时候可以任意调节,是函数向量的参数。
[0086]
步骤3.3给出纯磁控航天器姿态控制器
[0087][0088]
其中k1,k2是可选择的正常数,下方有其选值。
[0089]
本发明所设计的k1=50,k2=500,ε=13;
[0090]
本发明设计的仿真初始时间utc0=[2021,7,22,00,00,00];仿真时间24400s;仿真步长0.125s;得到以下结果:
[0091]
结合图2滚转角和俯仰角基本收敛于0
°
附近,而偏航角由于z轴上的不可控区较多,只能提供偏弱的磁力矩,因此偏航角会有所波动,当运行至不可控区时,偏航角略微发散,当运行至可控区时,偏航角又会收敛,但偏航角最终收敛于1
°
之内,由此可知三轴的控制精度都小于1
°
。从图中可以看到控制器控制下的姿态角变化收敛很快,超调较低,实现了预定控制效果。
[0092]
结合图3看到滚转角速度和俯仰角速度基本收敛在0附近,而偏航角速度由于不可控区的原因产生波动,本专利所提出的算法下的姿态角速度收敛很快。
[0093]
结合图4磁力矩器提供的控制力矩示意图,力矩大小在千分之五以内,满足实际情况。
[0094]
本发明为在轨航天器三轴纯磁控技术,仅仅将磁力矩器作为执行器,并且考虑到为解决航天器在实际工作环境中所受到的执行器输入饱和的限制,设计了控制器实现对于航天器的姿态进行有效控制,提高了磁控航天器系统的安全性与可靠性。在航天器对接分
离、在轨组装、编队飞行、故障航天器救援和废弃航天器离轨等领域具有广泛应用前景。
[0095]
本发明的有益效果是:1.本发明的在轨航天器纯三轴磁控方法可只利用磁力矩器提供相比传统推力设备较小的力矩实现航天器姿态的精确调整,稳态误差较小;2.本发明的在轨航天器纯三轴磁控方法提高了磁控航天器系统的安全性与可靠性。
[0096]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。