1.本技术实施例涉及测量装置领域,特别涉及一种雨量传感器感雨面积测量装置及测量方法。
背景技术:
2.红外光雨量传感器是一种采用红外光全反射原理设计的用于判断是否降雨,以及测量降雨量的传感器。传感器通过粘贴的方法安装在玻璃上,通过光路设计,传感器内的发光二极管发出的红外光经过透镜,到达玻璃上,再经过玻璃的反射,使红外光照射到传感器内的光敏二极管上,当未下雨时,通过光路的设计,红外光在玻璃上能够发生全反射,光敏二极管接收到光的强度最大,其输出的电流也越大;当下雨时,由于雨水的折射作用,破坏了红外光在玻璃上发生全反射的条件,只有部分红外光反射到光敏二极管上,其接收到光的强度大大减弱,输出的电流也相应地变小,并且随着雨量的增大,红外光反射到光敏二极管上光的强度进一步减弱,输出的电流也进一步变小,这就是传感器判断是否降雨,以及测量降雨量的原理。红外光雨量传感器广泛应用于交通、农业、智能城市、楼宇自动化等多个领域。
3.由于红外光雨量传感器采用的是光学原理,所以只有雨滴滴在传感器固定的区域内,传感器才能识别出是否下雨,以及降雨量的大小,降到其他地方的雨滴将无法被传感器所识别。所以传感器感雨面积的大小直接影响传感器的灵敏度及检测精度,感雨面积大的传感器更容易识别是否降雨,以及雨量的大小,也就是其灵敏度相应地就越高,反之其灵敏度就越低;因此,传感器感雨面积的大小是影响传感器性能的一项重要指标。
4.目前,红外光雨量传感器感雨面积的测量装置较少,测量精度较高的测量装置更为缺乏,传感器生产厂家给出的有效感雨面积的指标大多基于光学原理计算的理论数据,缺乏实际的测量手段。因此,设计一种雨量传感器感雨面积自动测量装置及其测量方法具有十分重要的意义。
技术实现要素:
5.本技术提供了一种雨量传感器感雨面积测量装置及测量方法,以解决现有技术中,红外光雨量传感器感雨面积的测量装置较少,测量精度较高的测量装置更为缺乏,传感器生产厂家给出的有效感雨面积的指标大多基于光学原理计算的理论数据,缺乏实际的测量手段的问题。
6.第一方面,本技术提供了一种雨量传感器感雨面积测量装置,包括:平面玻璃板;所述平面玻璃板水平设置,所述平面玻璃板的下方设有支架,所述平面玻璃板底面设有待测雨量传感器,所述平面玻璃板底面上靠近转角的位置设有原点定位组件,所述平面玻璃板的上方区域设有滴水组件,所述滴水组件由一端固定在所述支架上的移动机构驱动,以改变所述滴水组件在所述平面玻璃板的上方区域的位置,所述滴水组件上设有用于感应所述原点定位组件的原点探测器,所述平面玻璃板上表面设有与所述平面玻璃板滑
动连接的刮水组件;所述装置还包括分别与所述待测雨量传感器、所述移动机构、所述原点探测器、滴水组件、刮水组件电连接的控制器,所述控制器被配置为:根据所述原点探测器反馈的第一信号确定用于测量感雨面积的坐标系及坐标原点;所述第一信号用于指示所述原点探测器与所述原点定位组件之间的距离在第一预设值范围内;获取所述滴水组件在所述坐标系中的任意位置时,待测雨量传感器发送的雨量信号,并根据所述雨量信号和所述移动机构发送的位置信号,得到待测雨量传感器的感雨面积。
7.进一步的,所述滴水组件由若干个呈矩阵排布的滴水装置构成,所述滴水装置沿所述坐标系的x轴方向具有n列,沿所述坐标系的y轴方向具有m行,其中,n>1且m>1。
8.进一步的,所述移动机构包括一端与所述支架固定、另一端向远离所述平面玻璃板,并向平面玻璃板上表面方向延伸的移动机构支架,固定于所述移动机构支架上的三轴滑台模组,所述三轴滑台模组包括固定在所述移动机构支架上的z轴滑轨,所述z轴滑轨上设有z轴滑块,所述z轴滑块上设有x轴滑轨,所述x轴滑轨上设有x轴滑块,所述x轴滑块上设有y轴滑轨,所述y轴滑轨上设有y轴滑块,且所述y轴滑块与所述滴水组件固定连接。
9.进一步的,所述刮水组件包括固定在所述支架上的与所述支架一侧边长度相同的双轨直线滑台模组,所述双轨直线滑台模组上设有横梁,所述横梁与所述双轨直线滑台模组滑动连接,所述横梁上设有刮水器,所述刮水器的上方设有吹风机,且所述吹风机的出风口朝向所述平面玻璃板。
10.进一步的,所述原点定位组件包括位于所述平面玻璃板底面,且固定在所述支架上的金属支架,所述金属支架上设有金属柱。
11.第二方面,本发明还提供一种雨量传感器感雨面积测量方法,应用于第一方面所述的一种雨量传感器感雨面积测量装置,所述方法包括:获取原点探测器反馈的第一信号;所述第一信号用于指示所述原点探测器与所述原点定位组件之间的距离在第一预设值范围内;根据所述第一信号确定用于测量感雨面积的坐标系及坐标原点;获取滴水组件在对所述坐标系中不同区域执行滴水操作时,待测雨量传感器发送的雨量信号,同时,获取移动机构反馈的与所述雨量信号对应的在所述坐标系中的位置信号;根据所述雨量信号和所述位置信号进行粗测,生成感雨区域边界位置;根据所述感雨区域边界位置进行精测,生成局部感雨区域面积;根据所述局部感雨区域面积,得到待测雨量传感器的感雨面积。
12.进一步的,根据所述第一信号确定用于测量感雨面积的坐标系及坐标原点的步骤包括:获取移动机构反馈的与所述第一信号对应的位置信息;根据所述位置信息建立坐标系,其中所述坐标系的坐标原点为生成所述第一信号时,原点探测器在平面上的正投影位置。
13.进一步的,根据所述雨量信号和所述位置信号进行粗测,生成感雨区域边界位置
的步骤还包括:生成第一喷水信号;所述第一喷水信号用于指示所述滴水组件沿x轴正方向逐列进行滴水操作;接收所述待测雨量传感器发送的雨量信号;所述雨量信号为未降雨信号和降雨信号之中的一种;若相邻两次接收的雨量信号由未降雨信号转变为降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号;根据位置信号生成左边界位置,左边界位置标记为n,滴水装置沿所述坐标系的x轴方向具有n列,0≤n<n;若相邻两次接收的雨量信号由降雨信号转变为未降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号;根据位置信号生成右边界位置,右边界位置标记为m,0≤m<n;生成第二喷水信号;所述第二喷水信号用于指示所述滴水组件沿y轴正方向逐行进行滴水操作;接收所述待测雨量传感器发送的雨量信号;所述雨量信号为未降雨信号和降雨信号之中的一种;若相邻两次接收的所述雨量信号由未降雨信号转变为降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号;根据位置信号生成下边界位置,下边界位置标记为p,滴水装置沿所述坐标系的y轴方向具有m行,0≤p<m;若相邻两次接收的雨量信号由降雨信号转变为未降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号;根据所述位置信号生成上边界位置,上边界位置标记为q,0≤q<m;根据所述左边界位置、所述右边界位置、所述上边界位置和所述下边界位置生成所述感雨区域边界位置。
14.进一步的,根据所述感雨区域边界位置进行精测,生成局部感雨区域面积的步骤包括:生成第一控制信号;所述第一控制信号用于指示所述移动机构沿x轴正方向周期移动预设距离,以及指示所述滴水组件中位于左边界位置的第n列滴水装置进行滴水操作,所述滴水装置沿所述坐标系的x轴方向具有n列;0≤n<n;接收所述移动机构沿x轴正方向周期移动过程中,所述待测雨量传感器发送的雨量信号;若所述雨量信号显示为降雨信号,生成第二控制信号;所述第二控制信号用于指示所述移动机构沿y轴正方向周期移动预设距离,以及指示所述滴水组件中同时位于所述左边界位置的第n列、下边界位置的第p行的滴水装置进行滴水操作;接收所述移动机构沿y轴正方向周期移动过程中,所述待测雨量传感器发送的雨量信号;若相邻两次接收的所述雨量信号由未降雨信号转变为降雨信号,获取所述移动机构反馈的与所述降雨信号对应的位置信号;根据位置信号生成下边界位置;若相邻两次接收的所述雨量信号由降雨信号转变为未降雨信号,获取所述移动机构反馈的与所述降雨信号对应的位置信号;根据位置信号生成上边界位置;
根据所述下边界位置和所述上边界位置生成所述预设距离范围对应的局部感雨区域面积;重复执行所述生成第一控制信号的步骤,直至所述滴水装置移动至右边界位置,得到整个x轴方向上所有的局部感雨区域面积。
15.进一步的,执行一次所述滴水操作的步骤包括:控制滴水组件向平面玻璃板的方向滴水;当接收所述待测雨量传感器发送的雨量信号之后,生成第三控制信号,所述第三控制信号用于指示所述刮水组件对位于平面玻璃板表面的水进行清除。
16.由上述技术方案可知,本技术的有益效果为:1)通过采用针管滴水、判断雨量传感器输出信号的方法,找出雨量传感器的感雨区域的轮廓,进而通过累加的方法计算雨量传感器的感雨面积,为雨量传感器感雨面积提供了有效的实测手段;2)采用粗测与精测相结合的测量方法,既提高了测量精度,又保证了测量效率;3)采用行、列针管同时滴水和单针管滴水相结合的方法测试传感器的感雨区域,可以大大提高面积测量的效率;4)采用三轴滑台模组在x轴、y轴、z轴三个方向上精确移动,进而带动滴水组件在三个方向上精确移动,可以大大提高面积测量的精度,以及测量的灵活性;5)采用刮水器、吹风机对水滴进行清除处理,避免上组测量对下组测量的影响,可以大大提高面积测量的精度;6)采用原点探测器定位三轴滑台模组的位置,进而定位滴水组件的位置,可以确保滴水组件位于待测雨量传感器的正上方;7)采用直径0.3mm的针管作为滴水器件,测试传感器的感雨面积,可以大大提高面积测量的精度。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的获得其他的附图。
18.图1为本技术一种雨量传感器感雨面积测量装置的结构示意图;图2为本技术一种雨量传感器感雨面积测量装置的部件与控制器的连接示意图;图3为本技术一种雨量传感器感雨面积测量装置的滴水组件的结构示意图;图4为本技术一种雨量传感器感雨面积测量装置的具体结构示意图;图5为本技术一种感雨面积测量方法的流程图;图6为本技术一种感雨面积测量方法的粗测示意图;图7为本技术一种感雨面积测量方法的精测示意图。
19.附图标记:1-平面玻璃板,11-待测雨量传感器,12-原点定位组件,13-金属柱,14-刮水组件,141-双轨直线滑台模组,142-刮水器,143-吹风机,144-横梁,15-支架,17-金属支架,2-滴
水组件,21-滴水装置,22-原点探测器,3-移动机构,31-三轴滑台模组,32-移动机构支架,311-z轴滑轨,312-z轴滑块,313-x轴滑轨,314-x轴滑块,315-y轴滑轨,316-y轴滑块。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.现有技术中,红外光雨量传感器感雨面积的测量装置较少,测量精度较高的测量装置更为缺乏,传感器生产厂家给出的有效感雨面积的指标大多基于光学原理计算的理论数据,缺乏实际的测量手段,为了解决以上技术问题,本技术提供了一种雨量传感器感雨面积测量装置及测量方法。
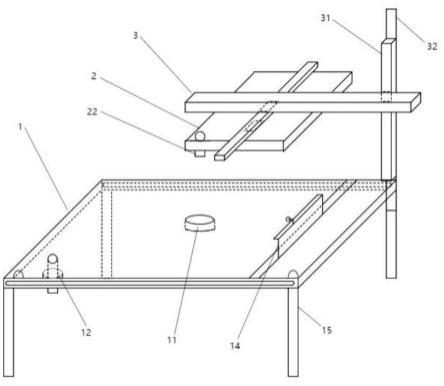
22.第一方面,由图1所示,本技术提供了一种雨量传感器感雨面积测量装置,包括:平面玻璃板1;所述平面玻璃板1水平设置,所述平面玻璃板1的下方设有支架15,平面玻璃板1用于固定待测雨量传感器11,还要接收滴水组件2滴落的水滴,所述平面玻璃板1底面设有待测雨量传感器11,待测雨量传感器11用于感应平面玻璃板1上是否有水滴,所述平面玻璃板1底面上靠近转角的位置设有原点定位组件12,原点定位组件12用于与原点探测器22配合使用,确定滴水组件2的零点位置,所述平面玻璃板1的上方区域设有滴水组件2,所述滴水组件2由一端固定在所述支架15上的移动机构3驱动,以改变所述滴水组件2在所述平面玻璃板1的上方区域的位置,所述滴水组件2上设有用于感应所述原点定位组件12的原点探测器22,所述平面玻璃板1上表面设有与所述平面玻璃板1滑动连接的刮水组件14,刮水组件14用于刮去测量时滴水组件2滴落在平面玻璃板1上的水滴;由图2所示,所述测量装置还包括分别与所述待测雨量传感器11、所述移动机构3、所述原点探测器22、滴水组件2、刮水组件14电连接的控制器,其中,控制器通过通讯接口与移动机构3和刮水组件14相连接,所述控制器被配置为:根据所述原点探测器22反馈的第一信号确定用于测量感雨面积的坐标系及坐标原点;所述第一信号用于指示所述原点探测器22与所述原点定位组件12之间的距离在第一预设值范围内;获取所述滴水组件2在所述坐标系中的任意位置时,待测雨量传感器11发送的雨量信号,并根据所述雨量信号和所述移动机构3发送的位置信号,得到待测雨量传感器11的感雨面积。
23.在本实施例中,控制器控制移动机构3驱动滴水组件2,使滴水组件2可以在平面玻璃板1的上方进行移动,滴水组件2上的原点探测器22若靠近平面玻璃板1上的原点定位组件12并小于一定距离后,原点探测器22向控制器输出闭合信号,控制器记录并存储此时移动机构3的位置,此位置也就是滴水组件2的零点位置,当控制器控制滴水组件2进行滴水时,待测雨量传感器11向控制器发送雨量信号,且移动机构3向控制器发送该雨量信号对应的位置信号,根据雨量信号和位置信号计算出待测雨量传感器的感雨面积。
24.由图3所示,所述滴水组件2由若干个呈矩阵排布的滴水装置21构成,所述滴水装置21沿所述坐标系的x轴方向具有n列,沿所述坐标系的y轴方向具有m行,其中,n>1且m>1。在本实施例中,滴水装置21可为针管也可为其他可以滴水的结构,在此不多做限制,针管
的滴水速率比较稳定,且针管的孔径为0.3mm,如将n与m设为10为例进行说明,可知滴水组件2内的针管被排为10行10列,且每个针管之间的间距被配置为3mm。那么,滴水装置21分别以行和列表示被配置为20个组,以坐标形式表示各组分别为:h[0]:针管(0,0)、针管(1,0)、针管(2,0)、针管(3,0)、针管(4,0)、针管(5,0)、针管(6,0)、针管(7,0)、针管(8,0)、针管(9,0);h[1]:针管(0,1)、针管(1,1)、针管(2,1)、针管(3,1)、针管(4,1)、针管(5,1)、针管(6,1)、针管(7,1)、针管(8,1)、针管(9,1);h[2]:针管(0,2)、针管(1,2)、针管(2,2)、针管(3,2)、针管(4,2)、针管(5,2)、针管(6,2)、针管(7,2)、针管(8,2)、针管(9,2);h[3]:针管(0,3)、针管(1,3)、针管(2,3)、针管(3,3)、针管(4,3)、针管(5,3)、针管(6,3)、针管(7,3)、针管(8,3)、针管(9,3);h[4]:针管(0,4)、针管(1,4)、针管(2,4)、针管(3,4)、针管(4,4)、针管(5,4)、针管(6,4)、针管(7,4)、针管(8,4)、针管(9,4);h[5]:针管(0,5)、针管(1,5)、针管(2,5)、针管(3,5)、针管(4,5)、针管(5,5)、针管(6,5)、针管(7,5)、针管(8,5)、针管(9,5);h[6]:针管(0,6)、针管(1,6)、针管(2,6)、针管(3,6)、针管(4,6)、针管(5,6)、针管(6,6)、针管(7,6)、针管(8,6)、针管(9,6);h[7]:针管(0,7)、针管(1,7)、针管(2,7)、针管(3,7)、针管(4,7)、针管(5,7)、针管(6,7)、针管(7,7)、针管(8,7)、针管(9,7);h[8]:针管(0,8)、针管(1,8)、针管(2,8)、针管(3,8)、针管(4,8)、针管(5,8)、针管(6,8)、针管(7,8)、针管(8,8)、针管(9,8);h[9]:针管(0,9)、针管(1,9)、针管(2,9)、针管(3,9)、针管(4,9)、针管(5,9)、针管(6,9)、针管(7,9)、针管(8,9)、针管(9,9);l[0]:针管(0,0)、针管(0,1)、针管(0,2)、针管(0,3)、针管(0,4)、针管(0,5)、针管(0,6)、针管(0,7)、针管(0,8)、针管(0,9);l[1]:针管(1,0)、针管(1,1)、针管(1,2)、针管(1,3)、针管(1,4)、针管(1,5)、针管(1,6)、针管(1,7)、针管(1,8)、针管(1,9);l[2]:针管(2,0)、针管(2,1)、针管(2,2)、针管(2,3)、针管(2,4)、针管(2,5)、针管(2,6)、针管(2,7)、针管(2,8)、针管(2,9);l[3]:针管(3,0)、针管(3,1)、针管(3,2)、针管(3,3)、针管(3,4)、针管(3,5)、针管(3,6)、针管(3,7)、针管(3,8)、针管(3,9);l[4]:针管(4,0)、针管(4,1)、针管(4,2)、针管(4,3)、针管(4,4)、针管(4,5)、针管(4,6)、针管(4,7)、针管(4,8)、针管(4,9);l[5]:针管(5,0)、针管(5,1)、针管(5,2)、针管(5,3)、针管(5,4)、针管(5,5)、针管(5,6)、针管(5,7)、针管(5,8)、针管(5,9);l[6]:针管(6,0)、针管(6,1)、针管(6,2)、针管(6,3)、针管(6,4)、针管(6,5)、针管(6,6)、针管(6,7)、针管(6,8)、针管(6,9);l[7]:针管(7,0)、针管(7,1)、针管(7,2)、针管(7,3)、针管(7,4)、针管(7,5)、针管(7,6)、针管(7,7)、针管(7,8)、针管(7,9);
l[8]:针管(8,0)、针管(8,1)、针管(8,2)、针管(8,3)、针管(8,4)、针管(8,5)、针管(8,6)、针管(8,7)、针管(8,8)、针管(8,9);l[9]:针管(9,0)、针管(9,1)、针管(9,2)、针管(9,3)、针管(9,4)、针管(9,5)、针管(9,6)、针管(9,7)、针管(9,8)、针管(9,9)。
[0025]
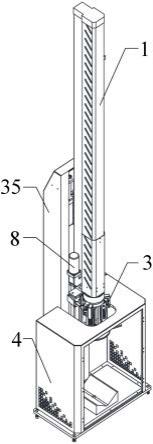
如图4所示,在一些实施例中,所述移动机构3包括一端与所述支架15固定,另一端向远离所述平面玻璃板1,并向平面玻璃板1上表面方向延伸的移动机构支架32,固定于所述移动机构支架32上的三轴滑台模组31,其中,所述三轴滑台模组31包括固定在所述移动机构支架32上的z轴滑轨311,所述z轴滑轨311上设有z轴滑块312,所述z轴滑块312上设有x轴滑轨313,所述x轴滑轨313上设有x轴滑块314,所述x轴滑块314上设有y轴滑轨315,所述y轴滑轨315上设有y轴滑块316,且所述y轴滑块316与所述滴水组件2固定连接。在本实施例中,三轴滑台模组31可以带动滴水组件2沿x轴、y轴、z轴三个方向自由移动,移动机构支架32用于固定支承三轴滑台模组31,滴水组件2面向平面玻璃板1设置,便于通过滴水组件2滴水来测量待测雨量传感器的感雨面积。
[0026]
所述刮水组件14包括固定在所述支架15上的与所述支架15一侧边长度相同的双轨直线滑台模组141,所述双轨直线滑台模组141上设有横梁144,所述横梁144与所述双轨直线滑台模组141滑动连接,所述横梁144上设有刮水器142,所述刮水器142的上方设有吹风机143,且所述吹风机143的出风口朝向所述平面玻璃板1。在本实施例中,刮水器142固定在横梁144上,可以在双轨直线滑台模组141的带动下做直线往复运动,刮去测量时滴水组件2滴落在平面玻璃板1上的水滴,刮水器142上设置的吹风机143可以吹干刮水器142刮水后剩余的水痕。
[0027]
所述原点定位组件12包括位于所述平面玻璃板1底面,且固定在所述支架15上的金属支架17,及设置在所述金属支架17上的金属柱13。在本实施例中,金属支架17用于将金属柱13固定在平面玻璃板1的底面,金属柱13用于与原点探测器22配合使用来确定滴水组件2的零点位置。
[0028]
第二方面,如图5所示,本发明还提供一种雨量传感器感雨面积测量方法,应用于第一方面所述的一种雨量传感器感雨面积测量装置,所述方法包括:s100,获取原点探测器反馈的第一信号;所述第一信号用于指示所述原点探测器与所述原点定位组件之间的距离在第一预设值范围内;在步骤s100中,以只有一个圆形感雨区域,且感雨区域在滴水组件涵盖范围(即30mm
×
30mm)以内的待测雨量传感器为例,对待测雨量传感器感雨面积的测量方法进一步进行说明,在此实施例中,三轴滑台模组每移动一步的距离被设置为0.5mm。控制器控制三轴滑台模组沿z轴移动,目视原点探测器在距离平面玻璃板5mm以内时,控制三轴滑台模组沿x、y轴移动,当原点探测器与金属柱对齐时,原点探测器会输出第一信号,并将第一信号传送至控制器。
[0029]
s200,根据所述第一信号确定用于测量感雨面积的坐标系及坐标原点;在步骤s200中根据所述第一信号确定用于测量感雨面积的坐标系及坐标原点的步骤包括:获取移动机构反馈的与所述第一信号对应的位置信息;根据所述位置信息建立坐标系,其中所述坐标系的坐标原点为生成所述第一信号时,原点探测器在平面上的正投影
位置。其中,记录滴水组件在坐标系中的相对位置,并根据滴水组件的位置建立相对坐标系。
[0030]
在实际应用场景中,当接收原点探测器反馈的第一信号后,此时使三轴滑台模组停止移动,控制器记录并存储此时三轴滑台模组的位置,并根据此位置确定滴水组件的初始零点位置。
[0031]
s300,获取滴水组件在对所述坐标系中不同区域执行滴水操作时,待测雨量传感器发送的雨量信号,同时,获取移动机构反馈的与所述雨量信号对应的在所述坐标系中的位置信号。
[0032]
s400,根据所述雨量信号和所述位置信号进行粗测,生成感雨区域边界位置;在步骤s400中,如图6所示,根据所述雨量信号和所述位置信号进行粗测,生成感雨区域边界位置的步骤还包括:生成第一喷水信号;所述第一喷水信号用于指示所述滴水组件沿x轴正方向逐列进行滴水操作;接收所述待测雨量传感器发送的雨量信号;所述雨量信号为未降雨信号和降雨信号之中的一种;若相邻两次接收的雨量信号由未降雨信号转变为降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号;根据位置信号生成左边界位置,左边界位置标记为n,滴水装置沿所述坐标系的x轴方向具有n列,0≤n<n;若相邻两次接收的雨量信号由降雨信号转变为未降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号;根据位置信号生成右边界位置,右边界位置标记为m,0≤m<n;生成第二喷水信号;所述第二喷水信号用于指示所述滴水组件沿y轴正方向逐行进行滴水;接收所述待测雨量传感器发送的雨量信号;所述雨量信号为未降雨信号和降雨信号之中的一种;若相邻两次接收的所述雨量信号由未降雨信号转变为降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号;根据位置信号生成下边界位置,下边界位置标记为p,滴水装置沿所述坐标系的y轴方向具有m行,0≤p<m;若相邻两次接收的雨量信号由降雨信号转变为未降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号;根据所述位置信号生成上边界位置,上边界位置标记为q,0≤q<m;根据所述左边界位置、所述右边界位置、所述上边界位置和所述下边界位置生成所述感雨区域边界位置。其中,执行一次所述滴水操作的步骤包括:控制滴水组件向平面玻璃板的方向滴水;当控制器接收到所述待测雨量传感器发送的雨量信号之后,生成第三控制信号,所述第三控制信号用于指示所述刮水组件对位于平面玻璃板表面的水进行清除。
[0033]
在实际应用场景中,控制器从x=0到x=9沿x轴正方向控制每一列排列的针管同时滴水,并读取待测雨量传感器的雨量信号,如果首次读取雨量信号为降雨信号,则表明此列针管中有1个或多个针管处于感雨区域内,但由于每个针管之间相距3mm,此行针管所在的位置与待测雨量传感器的真正感雨区域的左边界位置存在最大一个针管距离(3mm)的不确定性,因此,把前一列针管的位置设置为感雨区域的左边界位置;如果雨量信号为未降雨信号,则表明此行针管中没有针管处于感雨区域内,则控制器控制下一列针管同时滴水,直至待测雨量传感器输出的雨量信号首次为降雨信号;由于待测雨量传感器采用光全反射原理制成,待测雨量传感器的感雨区域是连续的,所以在判断完某列针管中有1个或多个针管处于感雨区域内后,接下来就是判断何时离开感雨区域,进而确定进入感雨区域和离开感雨区域中间区域,即传感器的感雨区域。
[0034]
当左边界位置确定后,控制器控制下一列针管同时滴水,并读取待测雨量传感器
的雨量信号,如果雨量信号为降雨信号,则表明此列针管依然处于感雨区域内,控制器将控制下一列针管同时滴水,重复上述操作,直至待测雨量传感器输出的雨量信号为未降雨信号,此列针管就处于感雨区域之外了,因此,把这一列针管的位置设置为感雨区域的右边界位置。
[0035]
在确定左边界位置和右边界位置之后,控制器从y=0到y=9沿y轴正方向控制每一行排列的针管同时滴水,并读取待测雨量传感器的雨量信号,如果首次读取雨量信号为降雨信号,则表明此行针管中有1个或多个针管处于感雨区域内,但由于每个针管之间相距3mm,此行针管所在的位置与待测雨量传感器真正感雨区域的下部边界存在最大一个针管距离(3mm)的不确定性,因此,把前一行针管的位置设置为感雨区域的下边界位置;如果雨量信号为未降雨信号,则表明此行针管中没有针管处于感雨区域内,则控制器控制下一行针管同时滴水,直至待测雨量传感器输出的雨量信号首次为降雨信号;当下边界位置确定后,控制器控制下一行针管同时滴水,并读取待测雨量传感器的雨量信号,如果雨量信号为降雨信号,则表明此行针管依然处于感雨区域内,控制器将控制下一行针管同时滴水,重复上述操作,直至待测雨量传感器输出的雨量信号为未降雨信号,此行针管就处于感雨区域之外了,因此,把这一行针管的位置设置为感雨区域的上边界位置。
[0036]
在本实施例中,当x=4时,也就是第4列的针管滴水后,待测雨量传感器发送的是未降雨信号,当x=5时,也就是位于第5列的针管滴水后,待测雨量传感器发送的是降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号,也就是位于x=4,即第4列的针管所对应的位置信号;根据位置信号生成左边界位置,此时左边界位置为n=4;当x=7时,也就是第7列的针管滴水后,待测雨量传感器发送的是降雨信号,当x=8时,也就是位于第8列的针管滴水后,待测雨量传感器发送的是未降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号,也就是位于x=8,即第8列的针管所对应的位置信号;根据位置信号生成右边界位置,此时右边界位置为m=8;当y=3时,也就是第3行的针管滴水后,待测雨量传感器发送的是未降雨信号,当y=4时,也就是位于第4行的针管滴水后,待测雨量传感器发送的是降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号,也就是位于y=3,即第3行的针管所对应的位置信号;根据位置信号生成下边界位置,此时下边界位置为p=3;当y=6时,也就是第6行的针管滴水后,待测雨量传感器发送的是降雨信号,当y=7时,也就是位于第7行的针管滴水后,待测雨量传感器发送的是未降雨信号,获取所述移动机构反馈的与未降雨信号对应的位置信号,也就是位于y=7,即第7行的针管所对应的位置信号;根据所述位置信号生成上边界位置,此时上边界位置为q=7。
[0037]
s500,根据所述感雨区域边界位置进行精测,生成局部感雨区域面积;在步骤s500中,如图7所示,根据所述感雨区域边界位置进行精测,生成局部感雨区域面积的步骤包括:生成第一控制信号;所述第一控制信号用于指示所述移动机构沿x轴正方向周期移动预设距离,以及指示所述滴水组件中位于左边界位置的第n列滴水装置进行滴水操作,所述滴水装置沿所述坐标系的x轴方向具有n列;0≤n<n;接收所述移动机构沿x轴正方向周期移动过程中,所述待测雨量传感器发送的雨量信号;若所述雨量信号显示为未降雨信号,说明第n列滴水装置未在感雨区域内,重复执行所述生成第一控制信号的步骤,若所述雨量信号显示为降雨信号,说明第n列滴水装置已进入感雨区域内,生成第二控
制信号;所述第二控制信号用于指示所述移动机构沿y轴正方向周期移动预设距离,以及指示所述滴水组件中同时位于所述左边界位置的第n列、下边界位置的第p行的滴水装置进行滴水操作;接收所述移动机构沿y轴方向周期移动过程中,所述待测雨量传感器发送的雨量信号;若相邻两次接收的所述雨量信号由未降雨信号转变为降雨信号,获取所述移动机构反馈的与所述降雨信号对应的位置信号;根据位置信号生成下边界位置;若相邻两次接收的所述雨量信号由降雨信号转变为未降雨信号,获取所述移动机构反馈的与所述降雨信号对应的位置信号;根据位置信号生成上边界位置;根据所述下边界位置和所述上边界位置生成所述预设距离范围对应的局部感雨区域面积;重复执行生成第一控制信号的步骤,直至所述滴水装置移动至所述右边界位置,得到整个x轴方向上所有的局部感雨区域面积。
[0038]
在实际应用场景中,从经过粗测得到的待测雨量传感器感雨区域的左边界位置开始,直至待测雨量传感器感雨区域的右边界位置结束,精细控制三轴滑台模组以每步细小位移向x轴正方向进行移动,进而带动滴水组件以每步细小位移向x轴正方向进行移动,采用列针管同时滴水和单针管单独滴水相结合的方式,对待测雨量传感器感雨面积进行精确的测量。为了便于阐述,将经过粗测测得的传感器感雨区域左边界位置列针管(即第n列针管)称为测量列针管,将同时位于传感器感雨区域左边界位置列针管(即第n列针管)和位于传感器感雨区域下部边界行针管(即第p行针管)称为测量针管(即针管(n,p))。
[0039]
第一步,控制器控制测量列针管同时滴水,也就是第n列针管同时滴水,并读取待测雨量传感器的雨量信号,如果雨量信号为未降雨信号,则表明测量列针管未处于感雨区域内,控制器控制滴水组件向x轴正方向移动一步,重复控制测量列针管同时滴水,继续读取待测雨量传感器的雨量信号,如果雨量信号为未降雨信号,则表明测量列针管仍未处于感雨区域内,控制器继续控制滴水组件向x轴正方向移动一步,重复控制测量列针管同时滴水,直至待测雨量传感器的雨量信号为降雨信号,表明此时测量列针管真正进入了待测雨量传感器的感雨区域。
[0040]
第二步,控制器控制测量针管(即针管(n,p))单独滴水,并读取待测雨量传感器的雨量信号,如果雨量信号为未降雨信号,则表明测量针管未处于感雨区域内,控制器控制滴水组件向y轴正方向移动一步,重复控制测量针管单独滴水,继续读取待测雨量传感器的雨量信号,如果雨量信号为未降雨信号,则表明测量针管仍未处于感雨区域内,控制器继续控制滴水组件向y轴正方向移动一步,重复控制测量针管单独滴水,直至待测雨量传感器的雨量信号为降雨信号,表明此时测量针管真正进入了待测雨量传感器的感雨区域,即得到了此步骤测量的下边界位置,控制器记录并存储此步骤的下边界位置。
[0041]
第三步,控制器控制滴水组件向y轴正方向移动一步,重复控制测量针管单独滴水,并读取待测雨量传感器的雨量信号,如果雨量信号为降雨信号,则表明测量针管仍处于感雨区域内,控制器继续控制滴水组件向y轴正方向移动一步,重复控制测量针管单独滴水,继续读取待测雨量传感器的雨量信号,如果雨量信号为降雨信号,则表明测量针管仍处于感雨区域内,控制器继续控制滴水组件向y轴正方向移动一步,重复控制测量针管单独滴水,直至待测雨量传感器的雨量信号为未降雨信号,表明此时测量针管真正移出了待测雨量传感器的感雨区域,测量针管的前一步位置即此步骤测量的上边界位置,控制器记录并存储此步骤上边界位置。
[0042]
第四步,控制器控制滴水组件向x轴正方向移动一步,判断滴水组件是否到达粗测
测得的待测雨量传感器的感雨区域的右边界位置,如果到达了,就终止面积的精测流程,否则重复执行第二步、第三步。其中,滴水组件每向x轴正方向移动一步,前后两次精测测得的感雨区域的下边界位置、上边界位置、左边界位置、右边界位置的边界围成一个区域,此区域是整个待测雨量传感器感雨区域中的一个局部感雨区域,此区域可以近似地看成由1个矩形区域、2个三角形区域构成,将这三个区域的面积求和,即可得到此步骤局部感雨区域的面积。
[0043]
s600,根据所述局部感雨区域面积,得到待测雨量传感器的感雨面积。
[0044]
在步骤s600中,将s500步骤中经过计算获得的所有局部感雨区域的面积做求和运算,即将所有步骤获得局部感雨区域的面积累加起来,即可计算出整个待测雨量传感器的感雨面积。
[0045]
由于雨量传感器的生产厂家不同,传感器的外型尺寸也不尽相同,可能超出滴水组件2的测量范围,通过多次移动滴水组件2的位置,按此测量方法同样可以实现大面积雨量传感器感雨面积的测量;同理,对于感雨区域多于一个的待测雨量传感器,可以通过多次移动滴水组件2的位置,按此测量方法同样可以实现感雨区域多于一个的待测雨量传感器感雨面积的测量。
[0046]
设n为感雨区域的左边界位置、设m为感雨区域的右边界位置、设p为感雨区域的下边界位置、设q为感雨区域的上边界位置;根据上述测量方法,雨量传感器感雨面积粗测具体流程为:第一步:循环次数控制变量i置1,即i=1;第二步:控制器控制h[i]组针管同时滴水,读取待测雨量传感器的雨量信号,判断雨量信号是否为降雨信号,若是降雨信号则表明h[i]组针管中有1个或多个针管处于感雨区域内,h[i-1]的位置就是感雨区域的左边界位置,即n=i-1, 控制器存储i-1的值,执行第三步;如果没有雨量信号输出,则表明h[i]组针管中没有针管处于感雨区域内,执行第六步;第三步:循环变量i的值加1,即i=i 1;第四步:判断i的值是否小于10,如果小于10,执行第五步;如果不小于10则执行第八步;第五步:控制器控制h[i]组针管同时滴水,读取待测雨量传感器的雨量信号,判断雨量信号是否为降雨信号,若是降雨信号,执行第三步;如果没有雨量信号输出,h[i]的位置就是感雨区域的右边界位置,即m=i,控制器存储i的值,执行第八步;第六步:循环变量i的值加1,即i=i 1;第七步:判断i的值是否小于10,如果小于10,执行第二步;如果不小于10则执行第八步;第八步:循环次数控制变量i置1,即i=1;第九步:控制器控制l[i]组针管同时滴水,读取待测雨量传感器的输出信号,判断是否有雨量信号输出,如果有雨量信号输出,则表明l[i]组针管中有1个或多个针管处于感雨区域内,l[i-1]的位置就是感雨区域的下边界位置,即p=i-1,控制器存储i-1的值,执行第十步;如果没有雨量信号输出,则表明l[i]组针管中没有针管处于感雨区域内,执行第十三步;
第十步:循环变量i的值加1,即i=i 1;第十一步:判断i的值是否小于10,如果小于10,执行第十二步;如果不小于10则结束粗测流程;第十二步:控制器控制l[i]组针管同时滴水,读取待测雨量传感器的输出信号,判断是否有雨量信号输出,如果有雨量信号输出,执行第十步;如果没有雨量信号输出,l[i]的位置就是感雨区域的上边界位置,即q=i,控制器存储i的值,结束粗测流程;第十三步:循环变量i的值加1,即i=i 1;第十四步:判断i的值是否小于10,如果小于10,执行第九步;如果不小于10则结束粗测流程;经过以上流程的粗测,就确定感雨区域的边界位置坐标,即:左边界位置:n、右边界位置:m、下边界位置:p、上边界位置:q。
[0047]
需要说明的是,根据以上待测雨量传感器的粗测测量方法可知,当h[i]组针管同时滴水,读取待测雨量传感器的雨量信号为降雨信号,则表明h[i]组针管中有1个或多个针管处于感雨区域内,但由于每个针管相距3mm,h[i]组针管所在的位置与待测雨量传感器真正感雨区域的下边界位置存在最大一个针管距离,即3mm的不确定性,因此,在确定下边界位置p时,需将h[i]组针管位置向下扩展一个针管(即3mm)距离,即p=i-1;同理可知,在确定左边界位置n时,需将l[i]组针管位置向左扩展一个针管(即3mm)距离,即n=i-1。
[0048]
由于待测雨量传感器感雨区域是连续的,所以对待测雨量传感器感雨区域上边界位置的粗测,采用的方法是:在确定待测雨量传感器的感雨区域下边界位置后,通过h[i]组针管同时滴水,读取待测雨量传感器雨量信号,当雨量信号为降雨信号,表明h[i]组针管处于感雨区域内,此时继续向上控制下一组针管同时滴水,当待测雨量传感器的雨量信号为未降雨信号,表明h[i]组针管已不在待测雨量传感器的感雨区域内,所以此时h[i]组针管的位置即是待测雨量传感器感雨区域的上边界位置,即q=i;同理可知,待测雨量传感器感雨区域的右边界位置,即m=i。
[0049]
待测雨量传感器精测每步间距设为0.5mm,以粗测后待测雨量传感器左边界位置n、右边界位置m、下边界位置p、上边界位置q为例,测量流程说明如下:第一步:根据粗测后待测雨量传感器左边界位置n、右边界位置m、下边界位置p、上边界位置q,计算待测雨量传感器的感雨面积精测的x轴方向循环次数num_x,即:num_x=(m-n)
×
6;y轴方向循环次数num_y,即:num_y=(q-p)
×
6;第二步:令x轴方向循环次数控制变量i=n
×
6;令y轴方向循环次数控制变量j=p
×
6;第三步:下边界位置数组low[i]清零,即:low[i]=0,上边界位置数组high[i]清零,即:high[i]=0,i的范围为0~num_x-1;第四步:控制器控制l[n]组针管同时滴水,读取待测雨量传感器雨量信号,如果雨量信号为降雨信号,则表明l[n]组针管中有1个或多个针管处于感雨区域内,则执行第五步;如果没有雨量信号输出,则表明l[n]组针管中没有针管处于感雨区域内,则执行第十二步;第五步:控制器控制针管[n,p]单独滴水,读取待测雨量传感器的输出信号,判断雨量信号是否为降雨信号,若是降雨信号,则表明针管[n,p]处于感雨区域内,控制器存储
low[i]数值,即low[i]=j
×
0.5,执行第六步,如果雨量信号为未降雨信号,执行第九步;第六步:循环变量j的值加1,即j=j 1;第七步:判断j的值是否小于num_y,如果小于num_y,执行第八步;如果不小于num_y则执行第十二步;第八步:控制器控制三轴滑台模组向y轴正方向水平移动0.5mm,控制器控制针管[n,p]滴水,读取待测雨量传感器雨量信号,如果雨量信号为降雨信号,则表明针管[n,p]处于感雨区域内,执行第六步;如果雨量信号为未降雨信号,则表明针管[n,p]不处于感雨区域内,控制器存储high[i]数值,即high[i]=(j-1)
×
0.5,执行第十二步;第九步:循环变量j的值加1,即j=j 1;第十步:判断j的值是否小于num_y,如果小于num_y,执行第十一步;如果不小于num_y则执行第十二步;第十一步:控制器控制三轴滑台模组向y轴正方向水平移动0.5mm,执行第五步;第十二步:循环变量i的值加1,即i=i 1;y轴方向循环次数控制变量j=p
×
6;第十三步:判断i的值是否小于num_x,如果小于num_x,执行第十四步;如果不小于num_x则结束精测流程;第十四步:控制器控制三轴滑台模组向x轴正方向移动0.5mm,执行第四步;待测雨量传感器感雨面积计算流程如下:第一步:感雨面积s求和计算循环次数控制变量i置零,即i=n
×
6,面积s置零,即s=0;第二步:判断(high[i 1]-low[i 1])-(high[i]-low[i])结果是否为正,如果为正,执行第三步,否则执行第四步;第三步:s=s (high[i]-low[i])
×
0.5 [(high[i 1]-low[i 1])-(high[i]-low[i])]
×
0.5
×
0.5,执行第五步;第四步:s=s (high[i 1]-low[i 1])
×
0.5 [(high[i]-low[i])-(high[i 1]-low[i 1])]
×
0.5
×
0.5,执行第五步;第五步:循环变量i的值加1,即i=i 1,执行第六步;第六步:判断i的值是否小于num_x,如果小于num_x,执行第二步;如果不小于num_x则结束面积计算流程。
[0050]
在本技术中先测量左边界位置以及右边界位置后再测量下边界位置和上边界位置,对测量的先后顺序,本技术不多做限制。
[0051]
以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员依然可以对本发明的具体实施方式进行修改或者等同替换,而这些未脱离本发明精神和范围的任何修改或者等同替换,其均在本发明的权利要求保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。