技术特征:
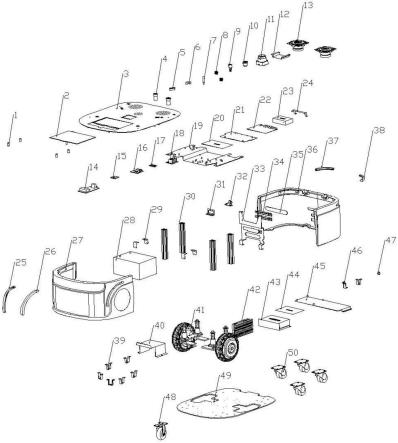
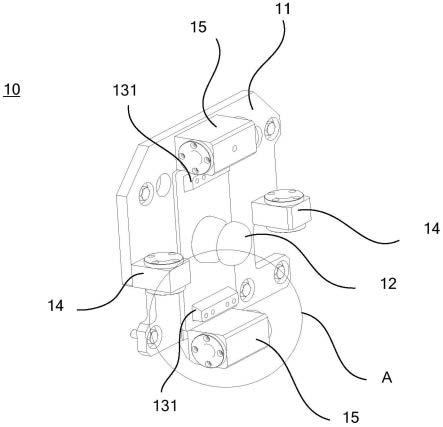
1.一种飞毛腿送餐机器人,包括头部组件(99)、上身组件(100)与底盘组件(101),其特征在于:所述底盘组件包括底盘(49)、顶部固定板(3)、前壳(27)与后壳(36)组成的装置盒体,所述底盘(49)上端设有多根支柱(30),所述底盘(49)上端一侧分别设有电源模块(43)、电源板(44)与驱动器(42),所述驱动器(42)另一端设有锂电池(28),多根所述支柱(30)上固定设有电路板固定架(29),其上端设有电路板固定板(19),所述电路板固定板(19)上分别设有功放板(14)、imu(15)、驱动板(16)、防夹手控制板(17)、继电器板(18)与主控板(20),所述电路板固定板(19)上还设有交换机(23)与算法板(22),所述顶部固定板(3)上分别设有激光雷达(11)、喇叭(13)、网口转接头(10)、航空插头(8)、usb转接头(4)与音频头(7),所述底盘(49)两侧对称设有驱动轮组件(41),所述驱动轮组件(41)后端对称设有四个万向轮(50),其前端设有一个定向轮(48);所述上身组件包括箱体(51),所述箱体(51)内部周围依次设有第一餐盘支柱(52)、第二餐盘支柱(53)与第三餐盘支柱(54),所述第一餐盘支柱(52)、第二餐盘支柱(53)与第三餐盘支柱(54)由上至下依次设有与之连接的顶部盖板(55)、两个餐盘(56)与箱体固定板(57),所述箱体(51)正面两侧分别设有右门转轴(58)与左门转轴(59);所述头部组件包括外壳(60),所述外壳(60)内部分别设有触摸屏(69)、屏幕固定框(67)与安卓板(65),所述外壳(60)顶部还分别设有头部盖板(62)、急停按钮(63)与多根螺杆(64)。2.根据权利要求1所述的飞毛腿送餐机器人,其特征在于:所述交换机(23)上端还设有与所述电路板固定板(19)固定设置的交换机固定板(24),所述算法板(22)通过算法板固定板(21)与所述电路板固定板(19)固定设置,所述锂电池(28)设置于与所述底盘(49)固定设置的电池支架(40) 上,所述顶部固定板(3)上还分别设有激光雷达(11)、喇叭(13)、网口转接头(10)、航空插头(8)、usb转接头(4)与音频头(7),所述激光雷达(11)与音频头(7)分别通过雷达固定支架(12)、音频头安装支架(5)、音频头固定板(6)与所述顶部固定板(3)固定设置,所述喇叭(13)与网口转接头(10)通过螺钉固定设置,所述航空插头(8)与所述usb转接头(4)通过六角螺母锁紧固定。3.根据权利要求1所述的飞毛腿送餐机器人,其特征在于:所述顶部固定板(3)下端分别与多根所述支柱(30)固定连接,所述顶部固定板(3)上还开设有用于插装电池压板(2)的插槽,所述顶部固定板(3)上还设有多个顶部支柱(1)与一个启动按钮(9)。4.根据权利要求1所述的飞毛腿送餐机器人,其特征在于:所述前壳(27)与所述后壳(36)下端两侧分别对称设有前壳转向灯右(25)、前壳转向灯左(26)与后壳转向灯右(37)、后壳转向灯左(38)。5.根据权利要求1所述的飞毛腿送餐机器人,其特征在于:所述后壳(36)内侧分别设有充电红外条(35)、电极固定框(33)与电极(34),所述电极固定框(33)上还设有充电引导电路支架(31)与充电引导电路板(32),其外侧设有手动充电口(47),所述前壳(27)与后壳(36)内侧分别通过前壳固定板(39)、后壳固定板(46)与所述底盘(49)固定连接。6.根据权利要求1所述的飞毛腿送餐机器人,其特征在于:所述右门转轴(58)与左门转轴(59)分别插装于所述箱体固定板(57)上端两侧的转轴固定座(70)内,所述转轴固定座(70)内设有两个第一推力球轴承(71)。
7.根据权利要求1所述的飞毛腿送餐机器人,其特征在于:所述右门转轴(58)与左门转轴(59)顶部转轴上均套装有转轴固定件(72),两个所述转轴固定件(72)均与所述顶部盖板(55)下端固定连接,所述顶部盖板(55)下端还设有与之固定连接的第一摆杆固定座(73),所述第一摆杆固定座(73) 上端依次设有第一尼龙垫片(74)与第一卡簧挡圈(75),所述第一摆杆固定座(73)下端依次设有第二推力球轴承(76)、顶部摆杆(77)与顶部摆杆卡簧销(78),所述顶部摆杆卡簧销(78)穿过所述顶部摆杆(77)、第二推力球轴承(76)、第一摆杆固定座(73)、第一尼龙垫片(74)与第一卡簧挡圈(75)锁紧固定。8.根据权利要求1所述的飞毛腿送餐机器人,其特征在于:所述箱体固定板(57)下端分别对称设有两个第二摆杆固定座(79),两个所述第二摆杆固定座(79)上端依次设有两个第一推力球轴承(71)、第一底部摆杆(81)、第二底部摆杆(82)、固定座销轴(83)与两个第二尼龙垫片(84),所述固定座销轴(83)穿过所述第一底部摆杆(81)、第二底部摆杆(82)、两个第一推力球轴承(71)、两个第二摆杆固定座(79)并与设置于两个所述第二摆杆固定座(79)下端的第二卡簧挡圈(85)锁紧连接。9.根据权利要求8所述的飞毛腿送餐机器人,其特征在于:所述第一底部摆杆(81)、第二底部摆杆(82)一侧分别设有与之连接的第一调节连杆(86)与第二调节连杆(87),且其之间分别放置有两个第二尼龙垫片(84),所述第一底部摆杆(81)、第二底部摆杆(82)、第一调节连杆(86)、第二调节连杆(87)与两个第二尼龙垫片(84)之间插装有调节杆卡簧销(88),且通过卡簧挡圈(89)卡紧连接,所述箱体固定板(57)上还设置有推杆固定座(90),所述推杆固定座(90)上设置有电动推杆(91),所述电动推杆(91)另一端与所述第一底部摆杆(81)连接,所述推杆固定座(90)与所述电动推杆(91)之间通过塞打螺钉(92)连接,所述电动推杆(91)另一端还设有推杆固定销(93),所述电动推杆(91)与所述推杆固定座(90)连接处上下端均设有第三尼龙垫片(94)。10.根据权利要求1所述的飞毛腿送餐机器人,其特征在于:所述触摸屏(69)与所述屏幕固定框(67)之间设有相粘贴连接的3m胶(95),所述安卓板(65)固定设置于安卓固定板(96)上,所述外壳(60)一端还设有相机支架(97),其上端设有深度相机(98),多根所述螺杆(64)均插装于所述外壳(60)顶部,所述屏幕固定框(67)与所述安卓固定板(96)固定连接,所述安卓固定板(96)与所述外壳(60)通过螺钉连接。
技术总结
本实用新型公开了一种飞毛腿送餐机器人,包括头部组件、上身组件与底盘组件,底盘组件包括底盘、顶部固定板、前壳与后壳组成的装置盒体,上身组件包括箱体,箱体内部周围依次设有第一餐盘支柱、第二餐盘支柱与第三餐盘支柱,第一餐盘支柱、第二餐盘支柱与第三餐盘支柱由上至下依次设有与之连接的顶部盖板、两个餐盘与箱体固定板,箱体正面两侧分别设有右门转轴与左门转轴,头部组件包括外壳,外壳内部分别设有触摸屏、屏幕固定框与安卓板,本实用新型的有益效果:通过手机或电脑连接飞毛腿机器人WIFI,用电脑或手机控制机器人行走,机器人通过激光雷达扫描周边环境,可自动关闭或开启仓门,回到等待点。回到等待点。回到等待点。
技术研发人员:宋育刚 李超 吴焰超
受保护的技术使用者:苏州穿山甲机器人股份有限公司
技术研发日:2022.03.22
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。