1.本实用新型涉及点胶设备技术领域,尤其是一种全自动点胶机构。
背景技术:
2.点胶机又称涂胶机、滴胶机、打胶机、灌胶机等,专门对流体进行控制。并将流体点滴、涂覆于产品表面或产品内部的自动化机器,可实现三维、四维路径点胶,精确定位,精准控胶,不拉丝,不漏胶,不滴胶。点胶机主要用于产品工艺中的胶水、油漆以及其他液体精确点、注、涂、点滴到每个产品精确位置,可以用来实现打点、画线、圆型或弧型。
3.点胶机是一种代替手工点胶的专业设备,在行业中的影响很广,在工业生产中,很多地方都需要用到点胶,比如集成电路、半导体封装等等,现有技术中的点胶机在使用过程中,通常需要人工来进行换针筒,具体存在如下不足:
4.1、人工换针管较为麻烦,每次还需要调整点胶位置;
5.2、点胶面积需要事前计算,不然容易造成溢胶或少胶;
6.3、点胶完需要人工确认;
7.4、漏点胶需人工补涂;
8.5、其操作麻烦,工作效率低。
技术实现要素:
9.本技术人针对上述现有生产技术中的缺点,提供一种结构合理的全自动点胶机构,从而可以有效的改善现有技术中的缺陷,保证点胶的可靠性,操作简便,工作效率高。
10.本实用新型所采用的技术方案如下:
11.一种全自动点胶机构,包括大工作台,所述大工作台的上表面中间位置固定底座,底座上配合安装有旋转柱,旋转柱独立旋转,旋转柱的外侧壁设置向外延伸的机械臂,所述机械臂的头部安装有吸头,所述吸头内部安装有视觉测量系统,所述旋转柱的顶面通过连接柱子安装有轴套,所述轴套内部安装转轴,所述转轴的上部连接有圆盘,圆盘与胶筒本体卡接,所述胶筒本体的顶面中间位置设置有加入口,所述轴套的外圆周面固定安装有支杆,支杆的头部安装至少一个点胶针头;所述大工作台的一旁设置有输送带,所述输送带的外部安装有aoi设备,所述aoi设备的一端外部设置有台阶面,所述台阶面上形成小工作台,所述小工作台上放置pc。
12.作为上述技术方案的进一步改进:
13.所述吸头呈喇叭状结构,吸头与输送带上的元器件对应,通过机械臂将输送带上的元器件抓取至大工作台上,并位于胶筒本体的下方。
14.胶筒本体的底部设置有连接口,单个点胶针头与连接口卡接。
15.所述胶筒本体内部安装有加热线圈,所述加热线圈通过电信号与pc连接,pc控制胶筒本体内部的温度。
16.所述支杆的中部呈圆环形结构,并在圆环形结构的外壁面向外伸出多个延伸杆,
每个延伸杆的头部安装点胶针头,每个点胶针头的型号不同,圆环形结构的内孔与轴套匹配。
17.所述大工作台、小工作台和输送带位于同一高度位置。
18.所述大工作台和输送带的底部通过支脚支撑。
19.所述pc通过传输信号线与底座上部的所有部件电信号连接。
20.本实用新型的有益效果如下:
21.本实用新型结构紧凑、合理,操作方便,通过机械臂、胶筒、aoi设备和输送带等部件之间的互相配合工作可以方便的完成元器件的点胶工作,点胶可靠性好,易操作,工作效率高,有效的避免了现有技术中各个缺陷。
22.同时,本实用新型还包括如下优点:
23.1、本实用新型采用多个针头(不同型号的针头),可以满足不同面积的点胶需求,使用灵活方便。
24.2、本实用新型通过视觉测量系统自动计算点胶面积及自动更换所需点胶针头,减少点胶溢胶、缺胶几率,提高点胶的可靠性。
25.3、本实用新型有效的减少人为调整点胶距离的失误。
26.4、本实用新型减少人工,能自动补漏胶。
附图说明
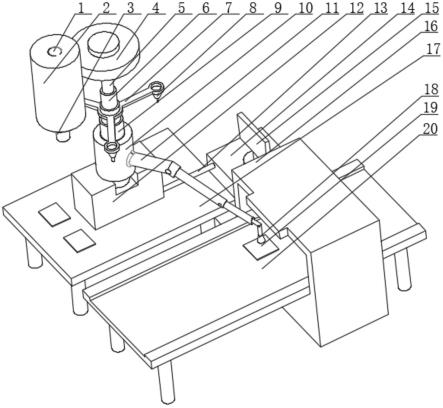
27.图1为本实用新型的结构示意图。
28.图2为本实用新型另一视角的结构示意图。
29.图3为图2中a部的局部放大图。
30.其中:1、加入口;2、胶筒本体;3、连接口;4、圆盘;5、转轴;6、轴套;7、支杆;8、点胶针头;9、连接柱子;10、旋转柱;11、机械臂;12、底座;13、传输信号线;14、小工作台;15、pc;16、aoi设备;17、大工作台;18、吸头;19、元器件;20、输送带。
具体实施方式
31.下面结合附图,说明本实用新型的具体实施方式。
32.如图1-图3所示,本实施例的全自动点胶机构,包括大工作台17,大工作台17的上表面中间位置固定底座12,底座12上配合安装有旋转柱10,旋转柱10独立旋转,旋转柱10的外侧壁设置向外延伸的机械臂11,机械臂11的头部安装有吸头18,吸头18内部安装有视觉测量系统,旋转柱10的顶面通过连接柱子9安装有轴套6,轴套6内部安装转轴5,转轴5的上部连接有圆盘4,圆盘4与胶筒本体2卡接,胶筒本体2的顶面中间位置设置有加入口1,轴套6的外圆周面固定安装有支杆7,支杆7的头部安装至少一个点胶针头8;大工作台17的一旁设置有输送带20,输送带20的外部安装有aoi设备16,aoi设备16的一端外部设置有台阶面,台阶面上形成小工作台14,小工作台14上放置pc15。
33.吸头18呈喇叭状结构,吸头18与输送带20上的元器件19对应,通过机械臂11将输送带20上的元器件19抓取至大工作台17上,并位于胶筒本体2的下方。
34.胶筒本体2的底部设置有连接口3,单个点胶针头8与连接口3卡接。
35.胶筒本体2内部安装有加热线圈,加热线圈通过电信号与pc15连接,pc15控制胶筒
本体2内部的温度。
36.支杆7的中部呈圆环形结构,并在圆环形结构的外壁面向外伸出多个延伸杆,每个延伸杆的头部安装点胶针头8,每个点胶针头8的型号不同,圆环形结构的内孔与轴套6匹配。
37.大工作台17、小工作台14和输送带20位于同一高度位置。
38.大工作台17和输送带20的底部通过支脚支撑。
39.pc15通过传输信号线13与底座12上部的所有部件电信号连接。
40.本实用新型所述的转轴5连接有驱动装置(图中未画出),驱动装置控制转轴5的旋转工作。
41.本实用新型各部件的作用:
42.本实用新型所述的吸头18内设置又视觉测量系统,可以直接测量点胶的pad大小。
43.本实用新型所述的pc15能记录aoi设备16的数据及根据视觉测量系统计算pad大小,同时去控制选取不同适合孔径的点胶针头8。
44.本实用新型所述的机械臂11通过吸头18去抓取需要点胶的元器件19,末端有视觉测量系统。
45.本实用新型所述的aoi设备16,在点胶完后测得元器件19的pad点胶情况并讲统计情况传送至pc15处,若在一定良品判定范围内则流出,若没达到点胶要求,则由机械臂11抓取继续点胶。
46.本实用新型所述的传输信号线13用来数据的传输。
47.本实用新型所述的胶筒本体2内部加热线圈,pc15控制可调节筒内温度进行恒温点胶。
48.本实用新型除了视觉测量系统识别pad还可以人工在电脑系统中输入所需点胶面积而选取不同孔距的针头。
49.本实用新型除了aoi设备16判定也可以人工显微镜下判断点胶情况。
50.实际使用过程中,通过如下操作步骤完成:
51.第一步:输送带20上间隔放置有顺序排列的待点胶的元器件19;
52.第二步:控制机械臂11工作,将吸头18放置在元器件19的上方;
53.第三步:吸头18内部的视觉测量系统识别所需点胶的面积,测量点胶的pad大小,检测的信号传输给pc15;
54.第四步:控制机械臂11继续工作,通过吸头18将元器件19抓取到大工作台17上;
55.第五步:其中一个点胶针头8旋转到胶筒本体2的底部连接口3处;
56.第六步:连接口3和点胶针头8卡接;
57.第七步:点胶针头8自动对准元器件19,并进行微调到位;
58.第八步:点胶针头8工作,对元器件19进行点胶;
59.第九步:点胶完毕后,通过机械臂11将已经点胶的元器件19再次放回输送带20上;
60.第十步:通过aoi设备16进行检测,检测过关即输出到下一道工序中,若检测未过关,则再次进行点胶,直至检测过关为止。
61.本实用新型还具备如下优势:
62.(一)、利用视觉测量系统识别所需点胶面积,并能自动调整点胶位置。
63.(二)、根据点胶需求自动更换不同型号的点胶针头8。
64.(三)、一套点胶设备配不同的孔距针头可以适用不同的点胶尺寸元器件19。
65.(四)、能自动判定所点胶的元器件19是否符合要求。
66.(五)、能实现自动补胶。
67.(六)、恒温点胶使胶体保持最适状态。
68.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在本实用新型的保护范围之内,可以作任何形式的修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。