1.本发明涉及水面清洁船,具体为一种水面垃圾的打捞无人清洁船。
背景技术:
2.公开号为cn205615676u提供的一种用于清洁水面垃圾的智能水面清洁船,以及公开号为cn210364299u提供的储舱具备压缩和减容功能的水面清洁船,上述两个现有技术都是通过船头设置打捞组件,进而实现水面清洁,但是船体在行进的过程中会激起浪花,而船体实现破浪,那么浪花就会向两侧扩散,进而导致水面漂浮的垃圾远离打捞组件,造成打捞效果较差的情况。
技术实现要素:
3.本发明的目的在于提供一种水面垃圾的打捞无人清洁船,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种水面垃圾的打捞无人清洁船,包括船体、花键轴、液压马达、桨板和半圆形顶环,其中:所述船体的两侧各转动安装一根花键轴,其中花键轴由液压马达驱动,桨板通过内部的花键槽与花键轴配合,那么桨板能够跟随花键轴转动并且能够沿着桨板的中心轴线平移,所述桨板的底部设有浮球,而桨板靠近船体的侧面设有耙钩,半圆形顶环设置在船体的侧面,而桨板上设有顶杆,当桨板向船尾摆动时顶杆与半圆形顶环接触,进而推动桨板下降。
5.优选的,所述清洁船还包括卸料组件,两个卸料组件对立设置并分别位于船体的两侧,用于对桨板收集回的垃圾进行提升卸载。
6.优选的,所述卸料组件包括导轨、滑块和刮擦板,导轨设置在船体的侧面,导轨由直线部和圆弧部组成,其中直线部贴合在船体的侧面,而圆弧部的圆心靠近船体的内部,导轨内配合安装有滑块,其中刮擦板与滑块连接,当桨板处于靠近船体的侧面并与侧面平行时刮擦板的外侧与桨板靠近船体的内侧对齐。
7.优选的,所述清洁船还包括提升两块刮擦板升降的提升组件,其中提升组件由收卷轮、绳索和卷扬机组成,两个收卷轮分别转动安装在船体上,收卷轮上卷绕有绳索,而绳索的另一端与刮擦板连接,其中两个收卷轮由卷扬机驱动,并且两根绳索的卷绕方向相反。
8.优选的,所述顶杆可竖直活动的安装在桨板上。
9.优选的,所述桨板上设有螺纹套筒,顶杆上的螺纹部与螺纹套筒形成螺纹连接。
10.与现有技术相比,本发明的有益效果是:本发明通过桨板向船尾摆动实现推动船体前进,而在桨板向船尾摆动时顶杆与半圆形顶环接触,进而推动桨板下降并深入水中,而在桨板回摆时顶杆脱离半圆形顶环,那么桨板在浮力的作用下漂在水面上,那么回摆的桨板不会推动船体后移,并且回摆的桨板能
够将船体侧面的杂物进行打捞,保证了打捞效果。
附图说明
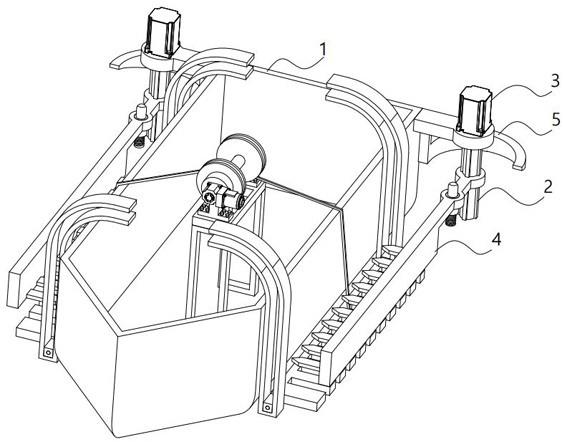
11.图1为本发明整体结构的三维示意图;图2为本发明中桨板的三维示意图;图3为本发明中导轨的主视图;图4为本发明所提供的清洁船在进行驱动船体移动以及打捞时的工作示意图;图5为本发明所提供的清洁船在进行卸料时的工作示意图。
12.图中:1船体、2花键轴、3液压马达、4桨板、5半圆形顶环、41浮球、42耙钩、43螺纹套筒、51顶杆、52螺纹部、61导轨、62滑块、63刮擦板、64收卷轮、65绳索、611直线部、612圆弧部。
具体实施方式
13.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
14.实施例:请参阅图1至图3,本发明提供一种技术方案:一种水面垃圾的打捞无人清洁船,包括船体1、花键轴2、液压马达3、桨板4和半圆形顶环5,其中:船体1的两侧各转动安装一根花键轴2,其中花键轴2由液压马达3驱动,具体为,液压马达3设置在船体1上,其动力输出端与花键轴2连接,那么液压马达3驱动花键轴2转动只是一种实施方式,也可以是其他驱动组件,比如说电机配合减速器、直线运动转换为旋转运动的组件,总之都是为了驱动花键轴2,桨板4通过内部的花键槽与花键轴2配合,那么桨板4能够跟随花键轴2转动并且能够沿着桨板4的中心轴线平移,那么桨板4能够深入水面,桨板4的底部设有浮球41,通过浮球41的设置使得桨板4在不受竖直推力的作用悬浮在水面上,而桨板4靠近船体1的侧面设有耙钩42,当桨板4向靠近船体1摆动时桨板4和耙钩42能够将漂浮在水面上的垃圾进行打捞,半圆形顶环5设置在船体1的侧面,而桨板4上设有顶杆51,当桨板4向船尾摆动时顶杆51与半圆形顶环5接触,进而推动桨板4下降,那么桨板4深入水底,摆动的桨板4就能推动船体1前行,为了避免船体1的前进动力不足的情况,也可以在船体1的尾部设置推进器。
15.作为优选的实施例,清洁船还包括卸料组件6,两个卸料组件6对立设置并分别位于船体1的两侧,用于对桨板4收集回的垃圾进行提升卸载。
16.作为优选的实施例,卸料组件6包括导轨61、滑块62、刮擦板63和提升组件,导轨61设置在船体1的侧面,导轨61由直线部611和圆弧部612组成,其中直线部611贴合在船体1的侧面,而圆弧部612的圆心靠近船体1的内部,导轨61内配合安装有滑块62,其中刮擦板63与滑块62连接,进而滑块62沿着直线部611运动时即可带动刮擦板63升起,而滑块62运动至圆弧部612时就能带动刮擦板63向靠近船仓的方向翻转,进而实现卸料,当桨板4处于靠近船
体1的侧面并与侧面平行时刮擦板63的外侧与桨板4靠近船体1的内侧对齐,为了避开桨板4侧面的耙钩42,刮擦板63上设有贯穿孔,进而在刮擦板63沿着桨板4侧面升起时与耙钩42产生运动干涉,提升组件由收卷轮64、绳索65和卷扬机组成,两个收卷轮64分别转动安装在船体1上,收卷轮64上卷绕有绳索65,而绳索65的另一端与刮擦板63连接,也就是说两块刮擦板63各由一根绳索65拽曳,其中两个收卷轮64由卷扬机驱动,具体为,卷扬机设置在船体1上,而卷扬机的动力输出端与两个收卷轮64连接,并且两根绳索65的卷绕方向相反,那么提升组件能够带动两块刮擦板63升降。
17.作为优选的实施例,顶杆51可竖直活动的安装在桨板4上,那么通过顶杆51的伸缩能够驱动桨板4竖直升降的高度,以适应不同工况。
18.作为优选的实施例,桨板4上设有螺纹套筒43,顶杆51上的螺纹部52与螺纹套筒43形成螺纹连接,此实施例中公开了用于调整顶杆51高度的特征,但是顶杆51的高度调整并非上述一种调整方式,比如说可以将顶杆51活动安装在桨板4上并由限位螺栓限位。
19.本发明的工作原理:两个液压马达3同步的驱动花键轴2转动,而清洁船刚入水时各部件如附图1所示,那么花键轴2带动桨板4向船尾摆动,当顶杆51与半圆形顶环5接触时就会对桨板4产生向下的推力,进而推动桨板4下降,那么桨板4深入水底,摆动的桨板4就能推动船体1前行,而后桨板4向船头的方向摆动,顶杆51脱离半圆形顶环5时桨板4在其底部浮球41的作用下就会漂浮在水面上,进而回摆的桨板4对水面上的垃圾进行打捞,此时各部件的状态如附图4所示,最终桨板4停靠在于船体1侧面平行的位置,具体如附图5所示。其中桨板4在向船尾摆动时是快速摆动,进而保证前进的动力,而桨板4在向船头摆动时是低速摆动,进而避免浪花拍走垃圾以及船体1后移的情况。
20.在桨板4处于附图5所示位置之后,卷扬机驱动收卷轮64转动,那么收卷轮64收卷绳索65,此时绳索65拉动刮擦板63运动,而与刮擦板63连接的滑块62是先经过直线部611导向再经过圆弧部612导向,因此刮擦板63先与桨板4内侧贴合上升,进而刮下桨板4上收集的垃圾,接着滑块62运动至圆弧部612之后刮擦板63向船舱翻转,实现卸料。
21.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。