技术特征:
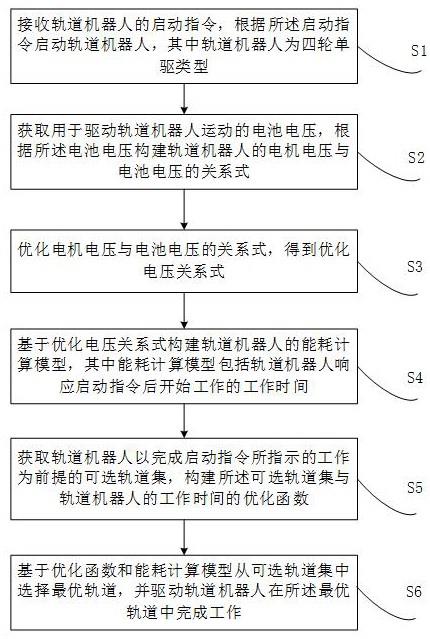
1.一种轨道机器人的行为轨迹控制方法,其特征在于,所述方法包括:接收轨道机器人的启动指令,根据所述启动指令启动轨道机器人,其中轨道机器人为四轮单驱类型;获取用于驱动轨道机器人运动的电池电压,根据所述电池电压构建轨道机器人的电机电压与电池电压的关系式;优化电机电压与电池电压的关系式,得到优化电压关系式,其中优化电压关系式为:其中,表示电机电压,表示电池电压,表示电池采用pwm技术的占空比,表示电机在工作时的电机电流,为电机的电机内阻,为电机的反电动势系数,为电机减速器的减速比,表示在电机电流确定情况下的电机转速;基于优化电压关系式构建轨道机器人的能耗计算模型,其中能耗计算模型包括轨道机器人响应启动指令后开始工作的工作时间;获取轨道机器人以完成启动指令所指示的工作为前提的可选轨道集,构建所述可选轨道集与轨道机器人的工作时间的优化函数;基于优化函数和能耗计算模型从可选轨道集中选择最优轨道,并驱动轨道机器人在所述最优轨道中完成工作。2.如权利要求1所述的轨道机器人的行为轨迹控制方法,其特征在于,所述轨道机器人的运动装置由一个电池、四个车轮、一个电机组成,其中电池通过脉冲宽度调制技术驱动电机旋转。3.如权利要求2所述的轨道机器人的行为轨迹控制方法,其特征在于,所述根据所述电池电压构建轨道机器人的电机电压与电池电压的关系式,包括:接收轨道机器人的pwm占空比;根据下式计算得到电机电压与电池电压的关系式:其中,表示电机电压,表示电池电压,表示电池采用pwm技术的占空比,为电池电压映射至电机电压的调节参数。4.如权利要求3所述的轨道机器人的行为轨迹控制方法,其特征在于,所述优化电机电压与电池电压的关系式,得到优化电压关系式,包括:接收用户设定轨道机器人工作时的最大工作速度,在所述最大工作速度为前提条件下计算电机的反电动势系数与电机减速器的减速比;获取电机的电机内阻,根据内阻、反电动势系数与减速比计算得到电池电压映射至电机电压的调节参数。5.如权利要求4所述的轨道机器人的行为轨迹控制方法,其特征在于,所述基于优化电
压关系式构建轨道机器人的能耗计算模型,包括:接收轨道机器人响应启动指令后开始工作时的最大工作时间;以所述最大工作时间为前提下,利用所述优化电压关系式构建轨道机器人的能耗计算模型,其中能耗计算模型为:模型,其中能耗计算模型为:其中,表示轨道机器人的能耗值,表示轨道机器人的工作时间,表示最大工作时间。6.如权利要求1所述的轨道机器人的行为轨迹控制方法,其特征在于,所述构建所述可选轨道集与轨道机器人的工作时间的优化函数,包括:基于启动指令确定轨道机器人的起始工作点与终止工作点,及在所述起始工作点与终止工作点中所有的停靠点;按照起始工作点、所有的停靠点与终止工作点将可选轨道集执行切分,得到多组分段轨道集;计算每组分段轨道集中每个分段轨道与轨道机器人的工作时间的优化分函数;汇聚每段优化分函数,得到每个可选轨道与轨道机器人的工作时间的优化函数。7.如权利要求6所述的轨道机器人的行为轨迹控制方法,其特征在于,所述计算每组分段轨道集中每个分段轨道与轨道机器人的工作时间的优化分函数,包括:获取在每个分段轨道下当前正在运行的轨道机器人总数;根据正在运行的轨道机器人总数计算每个分段轨道的拥挤度;在拥挤度为前提下,计算每个分段轨道与轨道机器人的工作时间的优化分函数。8.如权利要求7所述的轨道机器人的行为轨迹控制方法,其特征在于,所述根据正在运行的轨道机器人总数计算每个分段轨道的拥挤度,包括:其中,表示可选轨道集中第个可选轨道的第个分段轨道的拥挤度,表示第个可选轨道的第个分段轨道正在运行的轨道机器人总数,表示第个可选轨道的第个分段轨道正在运行的轨道机器人编号,表示第个可选轨道的个分段轨道的轨道长度,表示编号为的轨道机器人在第个可选轨道的第个分段轨道未行驶
的轨道长度,表示编号为的轨道机器人在第个可选轨道的第个分段轨道的行驶速度。9.如权利要求7所述的轨道机器人的行为轨迹控制方法,其特征在于,所述在拥挤度为前提下,计算每个分段轨道与轨道机器人的工作时间的优化分函数,包括:采用下式计算得到优化分函数:其中,表示轨道机器人行驶在第个可选轨道的第个分段轨道的工作时间,表示轨道机器人在第个分段轨道的行驶速度,表示第个分段轨道与轨道机器人的优化调节因子。10.一种轨道机器人的行为轨迹控制装置,其特征在于,所述装置包括:轨道机器人启动模块,用于接收轨道机器人的启动指令,根据所述启动指令启动轨道机器人,其中轨道机器人为四轮单驱类型;电压关系求解模块,用于获取用于驱动轨道机器人运动的电池电压,根据所述电池电压构建轨道机器人的电机电压与电池电压的关系式,优化电机电压与电池电压的关系式,得到优化电压关系式,其中优化电压关系式为:其中,表示电机电压,表示电池电压,表示电池采用pwm技术的占空比,表示电机在工作时的电机电流,为电机的电机内阻,为电机的反电动势系数,为电机减速器的减速比,表示在电机电流确定情况下的电机转速;能耗计算模块,用于基于优化电压关系式构建轨道机器人的能耗计算模型,其中能耗计算模型包括轨道机器人响应启动指令后开始工作的工作时间;优化函数模块,用于获取轨道机器人以完成启动指令所指示的工作为前提的可选轨道集,构建所述可选轨道集与轨道机器人的工作时间的优化函数;最优轨道选择模块,用于基于优化函数和能耗计算模型从可选轨道集中选择最优轨道,并驱动轨道机器人在所述最优轨道中完成工作。
技术总结
本发明涉及路径规划技术领域,一种轨道机器人的行为轨迹控制方法及装置,包括:获取用于驱动轨道机器人运动的电池电压,根据所述电池电压构建轨道机器人的电机电压与电池电压的优化电压关系式,基于优化电压关系式构建轨道机器人的能耗计算模型,其中能耗计算模型包括轨道机器人响应启动指令后开始工作的工作时间,获取轨道机器人以完成启动指令所指示的工作为前提的可选轨道集,构建所述可选轨道集与轨道机器人的工作时间的优化函数,基于优化函数和能耗计算模型从可选轨道集中选择最优轨道,并驱动轨道机器人在所述最优轨道中完成工作。本发明可以解决未考虑轨道机器人能耗而造成资源过渡消耗问题。造成资源过渡消耗问题。造成资源过渡消耗问题。
技术研发人员:郑煜臻 汪兆仁 段鹏飞
受保护的技术使用者:维飒科技(西安)有限公司
技术研发日:2022.10.12
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。