技术特征:
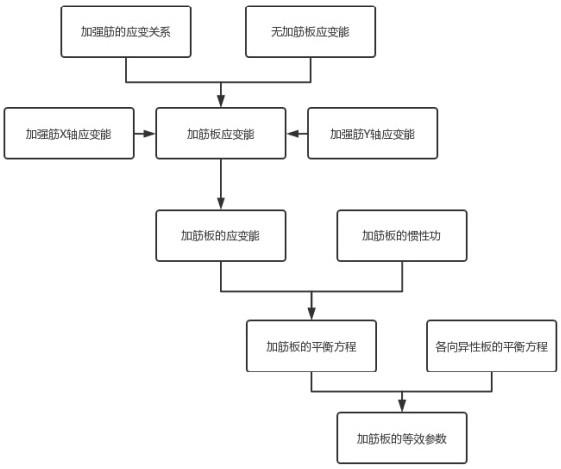
1.一种基于最小势能理论确定加筋板等效参数的方法,其特征在于,包括:步骤(1):计算加筋板的应变能;步骤(2):计算加筋板的惯性功;步骤(3):根据所述加筋板的应变能和惯性功,基于最小势能理论得到加筋板的平衡方程;步骤(4):获取正交各向异性板的平衡方程,并将所述正交各向异性板的平衡方程和所述加筋板的平衡方程进行等效,得到加筋板的平衡参数。2.根据权利要求1所述的基于最小势能理论确定加筋板等效参数的方法,其特征在于,所述步骤(1)包括:步骤(11):计算无加强筋的各向同性平板应变能;步骤(12):基于所述无加强筋的各向同性平板应变能,分别计算n个平行轴加强筋的总应变能、n个平行轴加强筋的总应变能;步骤(13):将所述无加强筋的各向同性平板应变能、n个平行轴加强筋的总应变能、n个平行轴加强筋的总应变能相加得到加筋板的应变能。3.根据权利要求2所述的基于最小势能理论确定加筋板等效参数的方法,其特征在于,所述步骤(11)中无加强筋的各向同性平板应变能的公式为:,其中,表示杨氏模量,表示泊松比,表示平板的长度,表示平板的宽度,表示,为方向位移,表示,为方向位移,表示平板的弯曲刚度且,表示平板的厚度,表示,表示,表示,为方向位移。4.根据权利要求2所述的基于最小势能理论确定加筋板等效参数的方法,其特征在于,所述步骤(12)中n个平行轴加强筋的总应变能的公式为:,其中,为轴方向上加强筋之间的间距,表示平板的长度,表示平板的宽度,表示方向加强筋的弹性模量,表示方向梁截面的横截面积,表示,为方向位移,表示方向加强筋形心在板局部坐标系的坐标,表示,,表示方向加强筋截面惯性矩,
表示方向梁截面的扭转刚度,表示,为方向位移。5.根据权利要求2所述的基于最小势能理论确定加筋板等效参数的方法,其特征在于,所述步骤(12)中n个平行轴加强筋的总应变能的公式为:,其中,为轴方向上加强筋之间的间距,表示平板的长度,表示平板的宽度,表示方向加强筋的弹性模量,表示方向梁截面的横截面积,表示,表示方向位移,表示方向加强筋形心在板局部坐标系的坐标,表示,,表示方向加强筋截面惯性矩,表示方向梁截面的扭转刚度,表示,为方向位移。6.根据权利要求1所述的基于最小势能理论确定加筋板等效参数的方法,其特征在于,所述步骤(2)中加筋板的惯性功公式为:,其中,表示平板的长度,表示平板的宽度,表示角频率,表示方向位移,表示将加强筋抹平之后所得等效面密度且,和分别表示圆柱体、梁和圆环的质量密度,表示平板的厚度,表示方向梁截面的面积,表示轴方向上加强筋之间的间距,表示方向梁截面的横截面积,表示轴方向上加强筋之间的间距。7.根据权利要求1所述的基于最小势能理论确定加筋板等效参数的方法,其特征在于,所述步骤(3)中加筋板的平衡方程公式为:其中,表示,表示,表示,表示,
表示,表示,表示,表示。8.根据权利要求1所述的基于最小势能理论确定加筋板等效参数的方法,其特征在于,所述步骤(4)中的正交各向异性板的平衡方程公式为:其中,表示方向应力条件下的杨氏模量,表示,表示沿方向位移,表示方向的泊松比,表示,表示,为方向位移,表示板材的密度,表示,表示时间,表示平面的剪切模量,表示,表示,表示方向应力条件下的杨氏模量,表示,表示方向的泊松比,表示,表示方向的弯曲刚度,表示,表示方向的弯曲刚度,,表示平板的厚度,表示,表示。9.根据权利要求1所述的基于最小势能理论确定加筋板等效参数的方法,其特征在于,所述步骤(4)具体为:步骤(41):获取正交各向异性板的平衡方程;步骤(42):在纯弯曲振动下将加筋板的平衡方程与正交各向异性板的平衡方程进行等效,得到加筋板的平衡参数。
技术总结
本发明涉及一种基于最小势能理论确定加筋板等效参数的方法,包括:步骤(1):计算加筋板的应变能;步骤(2):计算加筋板的惯性功;步骤(3):根据所述加筋板的应变能和惯性功,基于最小势能理论得到加筋板的平衡方程;步骤(4):获取正交各向异性板的平衡方程,并将所述正交各向异性板的平衡方程和所述加筋板的平衡方程进行等效,得到加筋板的平衡参数。本发明建立了一个加强筋和正交各向异性板参数转化的桥梁,方便分析加强筋的振动方程。方便分析加强筋的振动方程。方便分析加强筋的振动方程。
技术研发人员:张志刚 韩洋 李萧
受保护的技术使用者:上海索辰信息科技股份有限公司
技术研发日:2022.10.12
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。