技术特征:
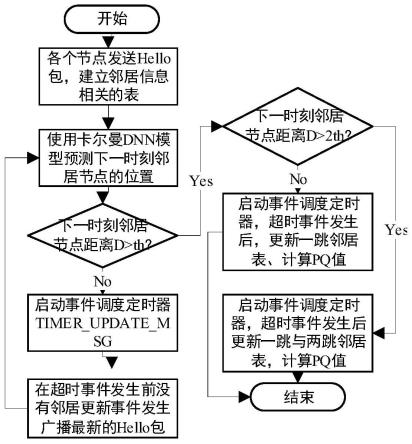
1.一种基于卡尔曼dnn模型预测的无人机自组网路由更新方法,其特征在于,所述方法包括以下步骤:步骤1:若无人机节点工作在二维平面,无人机随机部署在该平面内,每个节点首先广播hello包发现邻居;步骤2:当无人机节点收到上述步骤1发出的hello信令后,如果邻居表中没有对应的节点号,节点会该邻居建立邻居表,并根据hello包中的邻居表建立本节点的两跳邻居信息,节点通过卡尔曼dnn预测模型的计算,获得邻居表中每一个邻居节点下一时刻的位置信息;步骤3:根据邻居节点广播的hello包中位置信息更新卡尔曼滤波相关的参数,其他节点在接收到该hello包后更新相关邻居信息与链路质量值pq,并计算本节点与该邻居节点的距离,如果该距离大于某个阈值,则在定时时间t后更新邻居表并重新广播重新hello包;步骤4:如果某个节点的邻居一直没有超出通信范围,需要设置一个定时器,当节点在定时时间内都没有邻居节点更新事件发生,则广播一个hello包,其他节点收到该hello包后按照上述方式决定是否更新邻居表与链路质量值pq值;步骤5:根据上述步骤3和步骤4中更新后的邻居信息,计算路由。2.根据权利要求1所述的一种基于卡尔曼dnn模型预测的无人机自组网路由更新方法,其特征在于,所述步骤2中,卡尔曼dnn预测位置计算公式包括:s(n 1|n 1)=as(n|n) g
n
[x(n)-acs(n|n)]
ꢀꢀꢀꢀꢀ
(1)其中,s(n 1|n 1)为预测值,a为状态转移矩阵,s(n|n)为系统上一次预测输出,g
n
为卡尔曼增益,x(n)为观测值,c为观测系数矩阵;设n时刻预测输出误差协方差矩阵为p(n),白噪声过程w(n)与k(n)的协方差矩阵分别为cov
w
和cov
k
,则有:p(n)=au(n)a
t
cov
w
ꢀꢀꢀꢀꢀꢀ
(2)u(n)可由卡尔曼增益:g
n
=p(n)c
t
[cp(n)c
t
cov
k
]-1
ꢀꢀꢀꢀꢀꢀ
(3)表示为:u(n)=[i-cg
n
]p(n)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)dnn每一层的输出h可由w,s,b以及激活函数f表示为:h=f(ws b)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)。3.根据权利要求1所述的一种基于卡尔曼dnn模型预测的无人机自组网路由更新方法,其特征在于,所述步骤3中距离d计算公式包括:其中,(x
″
,y
″
)为本节点邻居预测的输出,为本节点下一时刻自身位置坐标;定时时长t为:其中,v为节点移动的速度;链路质量pq值的定义为:
其中,pq0为当前节点邻居表中对应的邻居节点所记录的pq值,pq1为邻居信令包中存储的pq值,信令包中存储的pq值为该邻居节点内的pq值。
技术总结
本发明公开了一种基于卡尔曼DNN模型预测的无人机自组网路由更新方法,该方法能够在提高了邻居信息的准确性,并且满足无人机自组网系统数据分组投递率高、端到端时延低的需求。首先,提出基于卡尔曼DNN节点位置预测模型,该模型用于计算节点下一时刻的位置;然后,根据预测的结果产生邻居更新事件,在超时事件发生后更新邻居表,广播邻居信令包,并根据邻居表更新路由;最后,综合链路质量值计算路由。本发明将邻居节点位置预测引入到传统的路由协议中,利用位置预测能够减小拓扑快速变化对链路质量的影响,克服了传统的移动自组网路由协议不适用于节点高速移动的环境,保证了系统链路稳定的同时提高了分组投递率,并降低了端到端时延。时延。时延。
技术研发人员:李大鹏 徐一航 高赟 井俊
受保护的技术使用者:南京揽星邮通科技有限公司
技术研发日:2022.08.04
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。