技术特征:
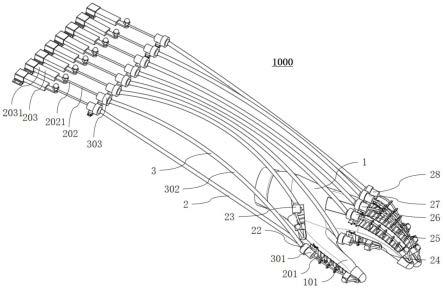
1.一种采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,包括:防护手套,所述防护手套包括五个指套部;驱动装置,所述驱动装置包括指部组件、连续柔性体和驱动组件,其中,所述指部组件设置在五个所述指套部中的一个所述指套部的背部上、大拇指对应的所述指套部的外侧上、食指对应的所述指套部的外侧上或腕掌关节对应的所述防护手套的背部处,所述连续柔性体的一端与所述指部组件的一端相连且另一端与所述驱动组件相连;所述驱动组件控制所述连续柔性体的收放,通过所述指部组件将所述连续柔性体传递的力转换成弯矩;当所述指部组件设置在五个所述指套部中的一个所述指套部的背部上时,所述弯矩控制对应的手指做伸展/屈曲运动;当所述指部组件设置在大拇指对应的所述指套部的外侧上或食指对应的所述指套部的外侧上时,所述弯矩相应地控制大拇指或食指做外展/内收运动;当所述指部组件设置在腕掌关节对应的所述防护手套的背部处时,所述弯矩控制大拇指做对掌运动。2.根据权利要求1所述的采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,所述连续柔性体为钢索、薄钢条或纤维条,所述驱动组件为电动推杆组件、电机滚筒组件和蜗杆齿条组件;其中,当所述连续柔性体为所述钢索时,所述驱动组件为所述电动推杆组件或所述蜗杆齿条组件且固定在所述防护手套上或不固定在所述防护手套上,或所述驱动组件为所述电机滚筒组件且不固定在所述防护手套上;当所述连续柔性体为所述薄钢条或所述纤维条时,所述驱动组件为所述电动推杆组件或所述蜗杆齿条组件且固定在所述防护手套上。3.根据权利要求2所述的采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,当所述连续柔性体为所述钢索且不固定在所述防护手套上时,所述钢索上设有导向组件,所述导向组件位于所述驱动组件和所述指部组件之间,用于对所述连续柔性体的运动方向进行引导。4.根据权利要求3所述的采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,所述引导组件包括第一引导口、软管和第二引导口,所述第一引导口和所述第二引导口分别固定在所述软管的两端,所述第一引导口固定在所述防护手套上且靠近所述指部组件,所述第二引导口不固定在所述防护手套上且远离所述指部组件,所述连续柔性体可移动地穿过所述第一引导口、所述软管和所述第二引导口。5.根据权利要求1所述的采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,所述指部组件包括支撑板;所述支撑板能弯曲但不能拉伸;当所述指部组件设置在五个所述指套部中的一个所述指套部的背部上时,所述支撑板的一端与对应的所述指套部的指尖处固定,所述支撑板的另一端与对应的所述指套部的基部处固定,所述连续柔性体的一端固定在所述支撑板的一端处;当所述指部组件设置在大拇指对应的所述指套部的外侧上或食指对应的所述指套部的外侧上时,所述支撑板的一端相应地与大拇指或食指的近侧指间关节与远侧指间关节之间的位置对应的所述指套部固定,所述支撑板的另一端相应地与大拇指或食指对应的所述指套部的基部处固定,所述连续柔性体的一端固定在所述支撑板的一端处;
当所述指部组件设置在腕掌关节对应的所述防护手套的背部处时,所述支撑板的一端与大拇指掌腕关节对应的所述防护手套的背部处固定,所述支撑板的另一端与食指掌腕关节对应的所述防护手套的背部处固定,所述连续柔性体的一端固定在所述支撑板的一端处。6.根据权利要求5所述的采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,所述支撑板为波浪形塑料板、波浪形纤维板或链条板。7.根据权利要求5所述的采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,当所述指部组件设置在五个所述指套部中的一个所述指套部的背部上时,所述指部组件还包括指尖套,所述指尖套与所述支撑板的一端相连,所述指尖套套设于对应的所述指套部的指尖上。8.根据权利要求5所述的采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,所述指部组件还包括约束器,所述约束器设置在所述支撑板上的上表面上,所述连续柔性体可移动地穿过所述约束器。9.根据权利要求5所述的采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,所述支撑板的一端处设有锚固点。10.根据权利要求1-9中任意一项所述采用连续柔性体驱动的手部灵巧康复机器人,其特征在于,其特征在于,所述驱动装置的数量为1至8个,其中,不属于同一个所述驱动装置的所述指部组件在所述防护手套上的设置位置不同。
技术总结
本发明公开了一种采用连续柔性体驱动的手部灵巧康复机器人,包括防护手套和驱动装置,防护手套包括五个指套部;驱动装置包括指部组件、连续柔性体和驱动组件,其中,指部组件设置在五个指套部中的一个指套部的背部上、大拇指对应的指套部的外侧上、食指对应的指套部的外侧上或腕掌关节对应的防护手套的背部处,连续柔性体的一端与指部组件的一端相连且另一端与驱动组件相连;驱动组件控制连续柔性体的收放,通过指部组件将连续柔性体传递的力转换成弯矩。本发明的结构简单、成本低、生产效率高,体积小、重量轻、便携性好,不会给病人手部造成很大承重负担,附加惯量小,不会对手指造成刚性冲击,安全性好。安全性好。安全性好。
技术研发人员:邵珠峰 霍晔 孔令杰 段金昊
受保护的技术使用者:清华大学
技术研发日:2022.08.22
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。