1.本发明涉及控制柜的技术领域,尤其是涉及便携式机器人控制柜。
背景技术:
2.机器人控制柜容纳工业机器人的控制系统及相关电气部件。
3.现有机器人控制柜整体移动不便,在需要进行位置移动时,浪费较多人力;而且柜体在移动过程中由于外界较大的外力作用而使整个机器人控制柜倾倒,损坏控制柜,甚至造成人员的伤亡。
4.针对上述中的相关技术,本发明提供便携式机器人控制柜。
技术实现要素:
5.本发明提供便携式机器人控制柜,以解决上述背景技术中提出的问题。
6.本发明提供便携式机器人控制柜,采用如下的技术方案:包括底座及安装于所述底座上的控制柜体,所述底座的底部安装有移动轮,还包括多组支撑环,所述支撑环位于所述移动轮的外部,通过所述移动调节机构控制所述支撑环沿所述移动轮的外部升降,所述控制柜体的外侧壁设有倾倒支撑板,所述控制柜体的内部设有防倾倒机构,所述防倾倒机构控制所述倾倒支撑板伸出的同时进行报警。
7.可选的,所述控制柜体通过减震组件连接于所述控制柜体的内腔上方,所述控制柜体的底部设有连接底板,所述减震组件包括安装于所述控制柜体内部的支撑板,所述支撑板四边均设有限位柱,所述连接底板通过限位柱连接于所述支撑板上,所述连接底板和支撑板之间连接有减震弹簧。
8.通过采用上述技术方案,能够避免控制柜体在移动过程中发生颠簸,导致元器件损坏的可能性,起到很好的减震效果。
9.可选的,所述移动调节机构包括连接于所述支撑环一侧的连接支板,多组所述连接支板相靠近的一端连接于连接主板上,所述连接支板上贯穿有导向柱,所述丝杆上螺接有丝杆,所述丝杆延伸至所述控制柜体内部的一端与升降电机的输出端相连接。
10.通过采用上述技术方案,通过导向柱和丝杆能够连接主板和连接支板进行升降,从而带动支撑环进行升降。
11.可选的,所述防倾倒机构包括固定于所述控制柜体内腔中心处的固定方块,所述固定方块的各侧壁均通过牵引弹簧连接有球体,所述倾倒支撑板的一侧壁连接有导向杆,所述控制柜体的内腔底部设有导向座,所述导向杆贯穿于所述导向座的内部,所述导向杆靠近所述球体的一端设有连接板,所述导向座和连接板之间连接有压缩弹簧。
12.通过采用上述技术方案,由于球体的重量会挤压导向杆,使得倾倒支撑板伸出后对控制柜体进行支撑,牵引弹簧和压缩弹簧能够在控制柜体扶正后,带动球体和导向杆自动复位。
13.可选的,所述控制柜体的内腔底部开有滑道,所述球体滑动连接于所述滑道上。
14.通过采用上述技术方案,保证牵引弹簧能够将球体进行复位。
15.可选的,所述球体采用金属球体,所述连接板靠近所述球体的一侧设有电接触块,所述球体和电接触块通过电源线与报警器相电连接。
16.通过采用上述技术方案,当球体受控制柜体倾倒时,滑动至于连接板上的电接触块连接,当接通时,并控制报警器进行报警,提醒人员及时对控制柜体的扶正。
17.可选的,所述倾倒支撑板远离所述防倾倒机构的一端固定有减震垫,所述减震垫呈一定角度倾斜设置。
18.通过采用上述技术方案,能够在控制柜体发生倾倒,倾倒支撑板对其支撑时,通过减震垫能够起到很好的缓冲作用。
19.综上所述,本发明包括以下至少一种有益效果:
20.1、本发明通过移动调节机构控制支撑环的升降,可以在下降后,对控制柜体进行支撑,避免在控制柜体不移动时,保证控制柜体的稳定性,而当需要移动时,则控制支撑环上升,使得移动轮没有支撑环的支撑,可以移动,便携性强。
21.2、本发明通过防倾倒机构,能够在控制柜体发生倾倒时,控制倾倒支撑板伸出,并对控制柜体进行进行较好的支撑,避免控制柜体倾倒到地面上造成柜内的电子元器件的损坏,同时通过报警器进行报警,提醒人员及时对控制柜体的扶正。
附图说明
22.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
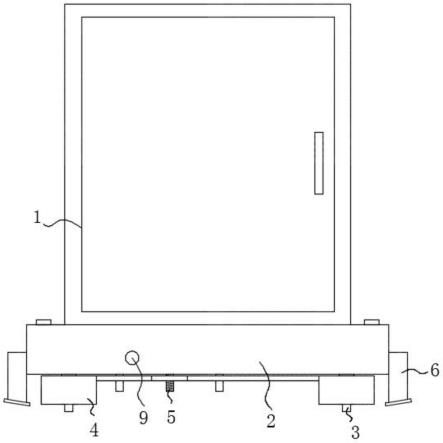
23.图1为本发明结构示意图;
24.图2为本发明内部结构示意图;
25.图3为本发明防倾倒机构结构示意图。
26.附图标记说明:1、控制柜体;101、连接底板;2、底座;3、移动轮;4、支撑环;5、移动调节机构;501、连接主板;502、连接支板;503、导向柱;504、丝杆;505、升降电机;6、倾倒支撑板;601、减震垫;7、减震组件;701、支撑板;702、限位柱;703、减震弹簧;8、防倾倒机构;801、固定方块;802、牵引弹簧;803、滑道;804、导向杆;805、导向座;806、连接板;807、压缩弹簧;808、球体;809、电接触块;9、报警器。
具体实施方式
27.以下结合附图1-3对本发明作进一步详细说明。
28.参照图1,本发明公开便携式机器人控制柜,包括底座2及安装于底座2上的控制柜体1,底座2的底部安装有移动轮3,移动轮3便于控制柜体1的移动,便携性强,还包括多组支撑环4,支撑环4位于移动轮3的外部,通过移动调节机构5控制支撑环4沿移动轮3的外部升降,通过移动调节机构5控制支撑环4的升降,可以在下降后,对控制柜体1进行支撑,避免在控制柜体1不移动时,保证控制柜体1的稳定性,而当需要移动时,则控制支撑环4上升,使得移动轮3没有支撑环4的支撑,可以移动,控制柜体1的外侧壁设有倾倒支撑板6,控制柜体1
的内部设有防倾倒机构8,防倾倒机构8控制倾倒支撑板6伸出的同时进行报警,当控制柜体1在移动时发生倾倒,会控制倾倒支撑板6伸出,并对控制柜体1进行进行较好的支撑,避免控制柜体1倾倒到地面上造成柜内的电子元器件的损坏,同时通过报警器9进行报警,能够对控制柜体1快速固定扶正。
29.参照图2,控制柜体1通过减震组件7连接于控制柜体1的内腔上方,控制柜体1的底部设有连接底板101,减震组件7包括安装于控制柜体1内部的支撑板701,支撑板701四边均设有限位柱702,连接底板101通过限位柱702连接于支撑板701上,连接底板101和支撑板701之间连接有减震弹簧703,在减震组件7的作用下,能够避免控制柜体1在移动过程中发生颠簸,导致元器件损坏的可能性,起到很好的减震效果。
30.移动调节机构5包括连接于支撑环4一侧的连接支板502,多组连接支板502相靠近的一端连接于连接主板501上,连接支板502上贯穿有导向柱503,丝杆504上螺接有丝杆504,丝杆504延伸至控制柜体1内部的一端与升降电机505的输出端相连接,驱动升降电机505,通过导向柱503和丝杆504能够连接主板501和连接支板502进行升降,从而带动支撑环4进行升降。
31.参照图3,防倾倒机构8包括固定于控制柜体1内腔中心处的固定方块801,固定方块801的各侧壁均通过牵引弹簧802连接有球体808,倾倒支撑板6的一侧壁连接有导向杆804,控制柜体1的内腔底部设有导向座805,导向杆804贯穿于导向座805的内部,导向杆804靠近球体808的一端设有连接板806,导向座805和连接板806之间连接有压缩弹簧807,当控制柜体1发生倾倒时,球体808会向倾斜的一侧滑动,由于球体的重量会挤压导向杆804,使得倾倒支撑板6伸出后对控制柜体1进行支撑,牵引弹簧802和压缩弹簧807能够在控制柜体1扶正后,带动球体808和导向杆804自动复位,避免倾倒支撑板6占用外部空间。
32.控制柜体1的内腔底部开有滑道803,球体808滑动连接于滑道803上,滑道803上的摩擦力尽可能小,保证牵引弹簧802能够将球体808进行复位。
33.球体808采用金属球体,连接板806靠近球体808的一侧设有电接触块809,球体808和电接触块809通过电源线与报警器9相电连接,当球体808受控制柜体1倾倒时,滑动至于连接板806上的电接触块809连接,当接通时,并控制报警器9进行报警,提醒人员及时对控制柜体1的扶正。
34.倾倒支撑板6远离防倾倒机构8的一端固定有减震垫601,减震垫601呈一定角度倾斜设置,能够在控制柜体1发生倾倒,倾倒支撑板6对其支撑时,通过减震垫601能够起到很好的缓冲作用,由于减震垫601呈一定角度倾斜设置,当倾倒支撑板6与地面接触时,倾倒支撑板6的受力朝上,并不会带动倾倒支撑板6恢复至原位。
35.本发明的便携式机器人控制柜的实施工作原理为:
36.使用时,通过移动调节机构5控制支撑环4的升降,可以在下降后,对控制柜体1进行支撑,避免在控制柜体1不移动时,保证控制柜体1的稳定性,而当需要移动时,则控制支撑环4上升,使得移动轮3没有支撑环4的支撑,可以移动,便携性强。
37.移动过程中,若由于工作人员的疏忽,导致控制柜体1向一侧发生倾倒,该侧的防倾倒机构8会控制倾倒支撑板6伸出,并对控制柜体1进行进行较好的支撑,避免控制柜体1倾倒到地面上造成柜内的电子元器件的损坏,同时通过报警器9进行报警,能够提醒人员及时对控制柜体1的扶正。
38.以上均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。