1.本发明涉及医疗器械技术领域,尤其是全自动造影注射仪注射速度自适应调整装置与调整方法。
背景技术:
2.在辅助医学影像造影的造影剂自动注射装置领域中,注射装置需根据病灶类型与病灶部位进行注射速率、注射总量与注射压力的前置设置,而后方能进行造影剂的自动注射;其中:注射速率是指每秒注射的造影剂数量;注射总量是指一次注射结束后,所注射的造影剂总量;注射压力采用磅压力每平方英寸(psi)代表,是指注射造影剂时所产生的允许压力值;注射装置配套的所有导管,均标注有能够承受多少压力的数值标记,如果实际使用过程中,注射压力超出导管标注的数值时,则会产生导管破裂,造成严重医疗事故。
3.为了降低导管破裂引发的严重后果,现有技术对造影剂自动注射装置进行了诸多改进,研发改进方式主要集中在注射速率与注射总量、延迟方式对注射效果的影响等方面;
4.而实际使用环境中,注射速率和注射压力限值的正确关系的建立十分重要,不仅影响患者的造影效果,且与血管造影介入检查安全密切相关;一旦血管堵塞或注射通路不畅造成注射压力增大,现有技术在遇到这种情况时为了避免不良后果,其注射速率往往直接降低至安全值;而当注射压力减小时,又直接快速提高注射速率;这种控制方式影响造影剂注射效果,还会引发患者血管壁的严重不良反应。
技术实现要素:
5.为了克服现有技术的不足,本发明提供了全自动造影注射仪注射速度自适应调整装置与调整方法,实现注射速率与注射压力的匹配,保证完成注射总量的同时,达到预期的血管显示效果,且不会对患者的血管壁造成伤害,结构设计科学严谨。
6.本发明全自动造影注射仪注射速度自适应调整装置与调整方法,其中:
7.全自动造影注射仪注射速度自适应调整装置,包括:
8.包括:压力检测模块、蠕动泵、控制模块、显示模块、驱动器以及流速检测模块;所述控制模块包括:处理器;
9.作为一种举例说明,所述驱动器为运动驱动器。
10.所述压力检测模块的输出端与所述控制模块的一端电连接;所述蠕动泵连接到所述驱动器的输出上;所述控制模块第二端与所述驱动器一端连接,用于接收驱动器的位置信息,并控制所述驱动器执行运行指令,从而驱动所述蠕动泵动作;所述显示模块的一端与所述控制模块的第三端电连接;所述流速检测模块与所述控制模块的第四端电连接;
11.所述压力检测模块用于检测输送管路的注射压力值;
12.所述蠕动泵用于带动注射管路实现注射液的输送;
13.所述控制模块内置有调节算法,用于控制所述驱动器,驱动蠕动泵的动作控制;所述控制模块还用于压力值的接收、调节算法的执行以及各种逻辑关系的处理;
14.所述显示模块用于输入工作参数,用户还可通过所述显示模块观察当前注射状态参数;
15.所述流速检测模块用于检测输送管路的注射液注射速率;
16.全自动造影注射仪注射速度自适应调整装置的调整方法,包括:
17.步骤一、用户通过显示模块,输入注射速率、注射压力正常值区间、注射压力上限、注射压力下限以及注射总量参数;
18.作为一种举例说明,所述注射压力正常值区间位于所述注射压力上限与所述注射压力下限之间,且注射压力正常值区间小于所述注射压力上限与所述注射压力下限之间的区间范围;
19.作为一种举例说明,所述注射压力正常值区间位于:注射压力上限的0.95倍与注射压力下限的1.05倍之间。
20.步骤二、注射启动后,蠕动泵进行注射液输送,压力检测模块检测到当前输送管路的实时压力值,控制模块接收到实时压力值后,采用调节算法调节蠕动泵控制注射速率,使得检测到的实时压力值维持在无风险状态,保持注射量不受影响,优化了注射时间;
21.作为一种举例说明,所述无风险状态是指当前输送管路的实时压力值处于所述注射压力上限与注射压力下限之间。
22.步骤三、所述调节算法架构设计包括:
23.设注射总量为s,注射速率为v,线性速率上升时间为t,全部注射时间为t,注射压力正常值区间为p,注射压力上限为pmax,注射压力下限为pmin;
24.步骤四、注射中,当压力检测模块检测到输送管路实时压力值高于所述注射压力上限pmax的0.95倍或低于所述注射压力下限pmin的1.05倍时,根据公式一至公式四(极限速率调整公式组)调整注射速率v;
25.利用标定设备进行系统标定,建立注射压力p和注射速率v的拟合关系式:
26.作为一种举例说明,所述标定设备为压力表;
27.所述p与v的分段函数表示为:
[0028][0029]
其中,pi为第i次测量的压力值,vi为第i次测量的注射速率值,px为用于拟合运算的注射压力值;a0,a1,a2,b0,b1,b2,c0,c1,c2等均为拟合系数;
[0030]
拟合系数的计算方法包括,在每个分段函数公式内进行3组测试并记录p和v的数值,
[0031][0032][0033][0034]
b0,b1,b2,c0,c1,c2计算方法与上述计算公式同理;
[0035]
测试不同注射速率下的压力值,并分别计算分段函数中的拟合系数;将此作为系统参数存储在控制模块中;
[0036]
作为一种举例说明,实时造影注射时,影响注射速率的因素较多,包括:输送管路的管径、压力限定(即不同输送管路规格等)、对比剂状态、输送管路长度等;
[0037]
步骤五、当所述压力检测模块检测到输送管路实时压力值处于所述注射压力正常值区间内时,依据公式五至公式七(快速速率调整公式组)调整注射速率v;依据快速速率调整公式组,快速恢复到注射速率v;此举保证了后期的造影效果;
[0038]
由于流速(流速是液体的流动速度,注射速率是蠕动泵的运行速率)被多种因素影响,不能保证当前注射速率即为设定的注射速率v,假设当前注射速率与设定的注射速率v间,速率误差值为e,则:
[0039]
e=vgoal-vnow;
ꢀꢀꢀ
公式五
[0040]
其中:vgoal为设定的注射速率,vnow为当前注射速率;
[0041]
vnew =kp*(e(k)-e(k-1)) ki*e(k) kd*(e(k)-2*e(k-1) e(k-2));
ꢀꢀꢀ
公式六
[0042]
其中:kp∈(1,20),ki∈(0,5),kd设为0,vnew为更新的注射速率,e(k)为第k次计算的速率误差值。
[0043]
vnow=vnew
ꢀꢀꢀ
公式七
[0044]
作为一种举例说明,加入误差阈值,设为0.1;比较速率误差值e与误差阈值,当速率误差值e大于误差阈值的,执行公式六至公式七操作;当速率误差值e小于误差阈值的,直接执行公式七操作;
[0045]
步骤六、所述线性速率上升时间t是指:注射速度从0到达到注射速率v的时间,线性速率上升时间t的设置是为了防止导管头在某一血管开口,因突然快速注射造影剂,致使导管头移动,达不到显示该血管的目的;
[0046]
线性速率上升时间t=v/a,a控制在10ml/s2以内,以免导管头移动,从而获得t值;利用s=at2 v(t-2t),即可获得理论的全部注射时间t值。
[0047]
步骤七、当血管发生堵塞时,注射速率发生变化,为了保证注射总量s,注射时间t将要调整;
[0048]
更改的注射时间为t δt,其中:δt=(vnew-v)/a;
[0049]
如果注射速率n次降速后,输送管路压力值仍处在无风险状态之外,则停止注射。
[0050]
作为一种举例说明,所述n依据医生具体造影部位设定,本发明取值n为2。
[0051]
本发明的有益效果:
[0052]
本发明提出一种根据注射压力实时匹配注射速率变化的装置与方法,保证注射压力值维持在无风险状态的同时,保持注射速率,确保注射压力与注射速率才能保证注射总量;
[0053]
避免造影过程的不良反应,在注射压力异常时,对注射速率进行控制与调整,从而保证了注射效果。
[0054]
利用压力变化反馈来调整注射速率,提高注射安全、减少不良反应、保证造影效果。
附图说明
[0055]
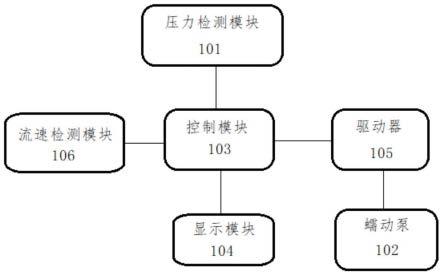
图1是本发明全自动造影注射仪注射速度自适应调整装置之原理结构示意图。
[0056]
图2是本发明全自动造影注射仪注射速度自适应调整装置之整体结构示意图。
[0057]
图3是本发明全自动造影注射仪注射速度自适应调整装置的调整方法之快速速率调整公式组的流程结构设计图。
具体实施方式
[0058]
下面结合附图对本发明的优选实施例进行详细说明。
[0059]
参照图1至图3所示,本发明全自动造影注射仪注射速度自适应调整装置与调整方法,其中:
[0060]
全自动造影注射仪注射速度自适应调整装置,包括:
[0061]
包括:压力检测模块101、蠕动泵102、控制模块103、显示模块104、驱动器105以及流速检测模块106;所述控制模块包括:处理器;
[0062]
作为一种举例说明,所述驱动器105为运动驱动器。
[0063]
所述压力检测模块101的输出端与所述控制模块103的一端电连接;所述蠕动泵102连接到所述驱动器105的输出上;所述控制模块103第二端与所述驱动器105一端连接,用于接收驱动器105的位置信息,并控制所述驱动器105执行运行指令,从而驱动所述蠕动泵102动作;所述显示模块104的一端与所述控制模块103的第三端电连接;所述流速检测模块106与所述控制模块103的第四端电连接;
[0064]
所述压力检测模块101用于检测输送管路的注射压力值;
[0065]
所述蠕动泵102用于带动注射管路实现注射液的输送;
[0066]
所述控制模块103内置有调节算法,用于控制所述驱动器105,驱动蠕动泵102的动作控制;所述控制模块103还用于压力值的接收、调节算法的执行以及各种逻辑关系的处理;
[0067]
所述显示模块104用于输入工作参数,用户还可通过所述显示模块104观察当前注射状态参数;
[0068]
所述流速检测模块106用于检测输送管路的注射液注射速率;
[0069]
全自动造影注射仪注射速度自适应调整装置的调整方法,包括:
[0070]
步骤一、用户通过显示模块104,输入注射速率、注射压力正常值区间、注射压力上限、注射压力下限以及注射总量参数;
[0071]
作为一种举例说明,所述注射压力正常值区间位于所述注射压力上限与所述注射压力下限之间,且注射压力正常值区间小于所述注射压力上限与所述注射压力下限之间的区间范围;
[0072]
步骤二、注射启动后,蠕动泵102进行注射液输送,压力检测模块101检测到当前输送管路的实时压力值,控制模块103接收到实时压力值后,采用调节算法调节蠕动泵102控制注射速率,使得检测到的实时压力值维持在无风险状态,保持注射量不受影响,优化了注射时间;
[0073]
作为一种举例说明,所述无风险状态是指当前输送管路的实时压力值处于所述注射压力上限与注射压力下限之间。
[0074]
步骤三、所述调节算法架构设计包括:
[0075]
设注射总量为s,注射速率为v,线性速率上升时间为t,全部注射时间为t,注射压力正常值区间为p,注射压力上限为pmax,注射压力下限为pmin;
[0076]
步骤四、注射中,当压力检测模块101检测到输送管路实时压力值高于所述注射压力上限pmax的0.95倍或低于所述注射压力下限pmin的1.05倍时,根据公式一至公式四(极限速率调整公式组)调整注射速率v;
[0077]
利用标定设备进行系统标定,建立注射压力p和注射速率v的拟合关系式:
[0078]
作为一种举例说明,所述标定设备为压力表;
[0079]
所述p与v的分段函数表示为:
[0080][0081]
其中,pi为第i次测量的压力值,vi为第i次测量的注射速率值,px为用于拟合运算的注射压力值;a0,a1,a2,b0,b1,b2,c0,c1,c2等均为拟合系数;
[0082]
拟合系数的计算方法包括,在每个分段函数公式内进行3组测试并记录p和v的数值,
[0083][0084][0085][0086]
b0,b1,b2,c0,c1,c2计算方法与上述计算公式同理;
[0087]
测试不同注射速率下的压力值,并分别计算分段函数中的拟合系数;将此作为系统参数存储在控制模块中;
[0088]
作为一种举例说明,实时造影注射时,影响注射速率的因素较多,包括:输送管路的管径、压力限定(即不同输送管路规格等)、对比剂状态、输送管路长度等;
[0089]
步骤五、当所述压力检测模块101检测到输送管路实时压力值处于所述注射压力正常值区间内时,依据公式五至公式七(快速速率调整公式组)调整注射速率v;依据快速速率调整公式组,快速恢复到注射速率v;此举保证了后期的造影效果;
[0090]
由于流速(流速是液体的流动速度,注射速率是蠕动泵的运行速率)被多种因素影响,不能保证当前注射速率即为设定的注射速率v,假设当前注射速率与设定的注射速率v间,速率误差值为e,则:
[0091]
e=vgoal-vnow;
ꢀꢀꢀ
公式五
[0092]
其中:vgoal为设定的注射速率,vnow为当前注射速率;
[0093]
vnew =kp*(e(k)-e(k-1)) ki*e(k) kd*(e(k)-2*e(k-1) e(k-2));
ꢀꢀꢀ
公式六
[0094]
其中:kp∈(1,20),ki∈(0,5),kd设为0,vnew为更新的注射速率,e(k)为第k次计算的速率误差值。
[0095]
vnow=vnew
ꢀꢀꢀ
公式七
[0096]
作为一种举例说明,加入误差阈值,设为0.1;比较速率误差值e与误差阈值,当速率误差值e大于误差阈值的,执行公式六至公式七操作;当速率误差值e小于误差阈值的,直接执行公式七操作;
[0097]
步骤六、所述线性速率上升时间t是指:注射速度从0到达到注射速率v的时间,线性速率上升时间t的设置是为了防止导管头在某一血管开口,因突然快速注射造影剂,致使导管头移动,达不到显示该血管的目的;
[0098]
线性速率上升时间t=v/a,a控制在10ml/s2以内,以免导管头移动,从而获得t值;利用s=at2 v(t-2t),即可获得理论的全部注射时间t值。
[0099]
步骤七、当血管发生堵塞时,流速检测模块106检测到注射速率发生变化,为了保证注射总量s,注射时间t将要调整;
[0100]
更改的注射时间为t
△
t,其中:
△
t(vnew-v)/a;当压力检测模块检测到输送管路压力值恢复到注射压力正常值区间时,逐步提高注射速度到注射速率,并完整注射;
[0101]
如果注射速率n次降速后,输送管路压力值仍处在无风险状态之外,则停止注射。
[0102]
作为一种举例说明,所述n依据医生具体造影部位设定,本发明取值n为2。
[0103]
本发明提出一种根据注射压力实时匹配注射速率变化的装置与方法,保证注射压力值维持在无风险状态的同时,保持注射速率,确保注射压力与注射速率才能保证注射总量;
[0104]
避免造影过程的不良反应,在注射压力异常时,对注射速率进行控制与调整,从而保证了注射效果。
[0105]
利用压力变化反馈来调整注射速率,提高注射安全、减少不良反应、保证造影效果。
[0106]
以上所述的仅为本发明的优选实施例,所应理解的是,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想,并不用于限定本发明的保护范围,凡在本发明的思想和原则之内所做的任何修改、等同替换等等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。