1.本发明涉及自动化设备中的机械手,具体地说是一种具有刚柔耦合给液功能的机械手,可安装于机器人上,用于为设备提供液体的任务。
背景技术:
2.随着全球工业自动化设备的大力发展,很多领域急需远程自助给液系统,如对某些精密仪器加工过程时刻保持着用液体降温,而不需要再额外设计固定式给液系统。为了提高工作效率,减少人力成本的投入,突破固定式给液系统的弊端,大力发展灵活便捷的给液系统,对自动化设备领域智能化水平的提高具有重要的现实意义。
技术实现要素:
3.为了满足自动化领域自助提供液体的需求,减少人力成本,保证自动化设备运行的稳定性,同时不会对用液位置表面造成损伤,本发明的目的在于提供一种具有刚柔耦合给液功能的机械手。
4.本发明的目的是通过以下技术方案来实现的:本发明包括移动关节、旋转关节、柔性弯曲关节及给液系统,其中移动关节安装于机器人上,所述移动关节的输出端分别安装有旋转关节、柔性弯曲关节和给液系统,并驱动所述旋转关节、柔性弯曲关节和给液系统移动;所述旋转关节的输出端为中空的旋转轴,所述旋转轴的一端与柔性弯曲关节的动力源相连通,另一端与作为所述柔性弯曲关节输出端的刚柔机械软指相连通,所述刚柔机械软指具有形变部及给液部,所述柔性弯曲关节的动力源通过旋转轴向形变部通气,进而使所述形变部发生弯曲形变,所述给液系统通过液体软管与刚柔机械软指的给液部相连通,所述移动关节、旋转关节及形变部驱动给液部到达设定位置及角度,并通过所述给液系统为自动化设备提供液体。
5.其中:所述移动关节包括固定底板、移动传动机构、移动底板、移动电机及滑动轴,所述固定底板安装在机器人上,所述固定底板上设有滑动轴,作为所述移动关节输出端的移动底板的一端与滑动轴滑动连接,所述旋转关节、柔性弯曲关节及给液系统分别安装于移动底板的另一端;所述移动底板上安装有移动电机,所述移动电机通过移动传动机构驱动移动底板沿滑动轴往复移动。
6.所述移动传动机构包括相互啮合的移动齿条及移动齿轮,所述移动齿条安装于固定底板上,所述移动齿轮转动安装于移动底板上,所述移动齿轮的齿轮轴与移动电机的输出轴连接;所述移动电机驱动移动齿轮旋转,通过所述移动齿轮与移动齿条的啮合实现移动底板沿滑动轴的往复移动。
7.所述旋转关节包括底座、旋转电机、旋转传动机构及旋转轴,所述底座安装于移动关节的输出端,所述旋转电机固定在底座上,所述旋转轴转动安装于底座上,所述旋转电机通过旋转传动机构与旋转轴连接,驱动所述旋转轴转动。
8.所述旋转传动机构包括相互啮合的输出齿轮及输入齿轮,所述输出齿轮连接于旋
转电机的输出轴上,所述旋转轴上连接有输入齿轮,所述旋转电机驱动输出齿轮旋转,通过所述输出齿轮与输入齿轮的啮合实现旋转轴的转动。
9.所述底座包括旋转底座及电机底座,所述旋转底座与电机底座沿移动关节输出的移动方向并排连接在一起后共同安装在移动关节的输出端,所述旋转电机固定在电机底座上,所述旋转电机的输出轴通过旋转轴承与旋转底座转动连接,所述旋转轴分别通过旋转轴承与旋转底座、电机底座转动连接;所述旋转传动机构位于旋转底座与电机底座之间。
10.所述柔性弯曲关节包括气动仓、电磁阀、气泵及刚柔机械软指,所述气动仓安装于移动关节的输出端,所述电磁阀及气泵分别固定在气动仓的内部,所述电磁阀的一端与气泵相连通,所述电磁阀的另一端与旋转轴的一端相连通,所述旋转轴的另一端与刚柔机械软指相连通。
11.所述刚柔机械软指包括刚性底座及柔性软指,所述刚性底座内部分别开设有通气管路及通液管路,所述柔性软指的上部为形变部,所述形变部为中空的折叠结构,所述柔性软指的下部为给液部,所述给液部为中空软管,所述形变部的内腔与给液部的内腔为相对独立的两个空间,所述通气管路的一端与旋转轴的另一端相连通,所述通气管路的另一端与形变部的内腔相连通,所述通液管路的一端与液体软管相连通,所述通液管路的另一端与给液部的内腔相连通;所述形变部的折叠结构在充入设定气压的气体后展开弯曲发生形变,进而改变所述给液部的末端给液口的位置及角度,所述给液系统提供的液体通过液体软管经通液管路流入给液部,最终从所述末端给液口喷出。
12.所述给液系统包括储液仓、供液阀及液体软管,所述储液仓安装于移动关节的输出端,所述供液阀的输入端与储液仓相连通,所述供液阀的输出端与液体软管相连通。
13.所述储液仓上设有用于向仓内补液的液体转接头。
14.本发明的优点与积极效果为:1. 本发明是安装在机器人上的具有刚柔耦合给液功能的机械手,移动关节上安装旋转关节、柔性弯曲关节和给液系统,使得给液范围较广,能够达到长距离顺利给液的目标。
15.2. 本发明末端给液采用柔性弯曲关节,刚柔耦合机械软指采用一体化设计,关节机构精简,特别是末端柔性不会对所给液的位置造成任何的损伤。
16.3. 本发明由移动关节、旋转关节、柔性弯曲关节的共同作用,在电机数量较少的情况下,能达到预定位置和角度,满足自动化给液的使用要求。
17.4. 本发明柔性弯曲关节由电磁阀控制刚柔机械软指内的大气压,从而精准控制刚柔机械软指的弯度;给液系统由供液阀控制刚柔机械软指末端的给液流量,从而达到精准控制的目的。
18.5. 本发明具有轻量化、模块化、自动化现场适应性强,易于安装、操控精度高等优点。
附图说明
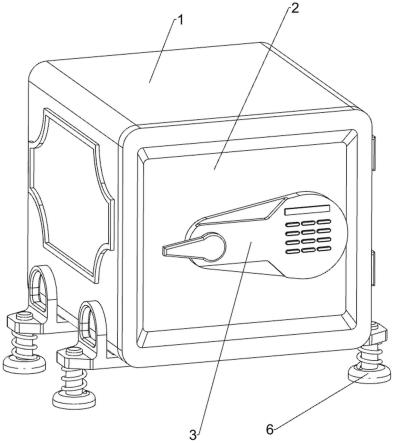
19.图1为本发明的立体结构示意图;图2为本发明移动关节的结构示意图;图3为本发明旋转关节、柔性弯曲关节及给液系统的内部结构示意图;
图4为本发明柔性弯曲关节的内部结构示意图;其中:1为移动关节,2为旋转关节,3为柔性弯曲关节,4为给液系统,5为固定底板,6为移动齿条,7为移动齿轮,8为移动底板,9为移动电机,10为齿轮轴,11为移动轴承,12为滑动轴承,13为滑动轴,14为储液仓,15为气动仓,16为旋转底座,17为电机底座,18为旋转电机,19为输出齿轮,20为输入齿轮,21为旋转轴,22为旋转轴承,23为电磁阀,24为气泵,25为气动转接头,26为供液阀,27为液体转弯头,28为液体转接头,29为刚柔机械软指,30为刚性底座,31为柔性软指,32为末端给液口,33为液体软管,34为通气管路,35为通液管路。
具体实施方式
20.下面结合附图对本发明作进一步详述。
21.如图1~4所示,本发明包括移动关节1、旋转关节2、柔性弯曲关节3及给液系统4,其中移动关节1安装于机器人上,移动关节1的输出端分别安装有旋转关节2、柔性弯曲关节3和给液系统4,并驱动旋转关节2、柔性弯曲关节3和给液系统4移动;旋转关节2的输出端为中空的旋转轴21,旋转轴21的一端与柔性弯曲关节3的动力源相连通,另一端与作为柔性弯曲关节3输出端的刚柔机械软指29相连通,刚柔机械软指29具有形变部及给液部,柔性弯曲关节3的动力源通过旋转轴21向形变部通气,进而使形变部发生弯曲形变,给液系统4通过液体软管33与刚柔机械软指29的给液部相连通,移动关节1、旋转关节2及形变部驱动给液部到达设定位置及角度,并通过给液系统4为自动化设备提供液体。
22.如图1、图2所示,本实施例的移动关节1包括固定底板5、移动传动机构、移动底板8、移动电机9及滑动轴13,固定底板5安装在机器人上,固定底板5上设有滑动轴13,作为移动关节1输出端的移动底板8的一端(下端)与滑动轴13滑动连接,旋转关节2、柔性弯曲关节3及给液系统4分别安装于移动底板8的另一端(上端);移动底板8上安装有移动电机9,移动电机9通过移动传动机构驱动移动底板8沿滑动轴13往复移动。本实施例的滑动轴13为平行的两根,移动底板8下端的两侧分别通过滑动轴承12与两根滑动轴13滑动连接,两根滑动轴13也通过两个滑动轴承12支撑移动底板8。本实施例的移动传动机构包括相互啮合的移动齿条6及移动齿轮7,移动齿条6安装于固定底板5上,位于两根滑动轴13的中间;移动齿轮7的齿轮轴10通过两个移动轴承11转动安装于移动底板8上,两个移动轴承11支撑齿轮轴10,且齿轮轴10与移动电机9的输出轴连接。移动电机9驱动移动齿轮7旋转,通过移动齿轮7与移动齿条6的啮合实现移动底板8沿滑动轴13的往复移动。
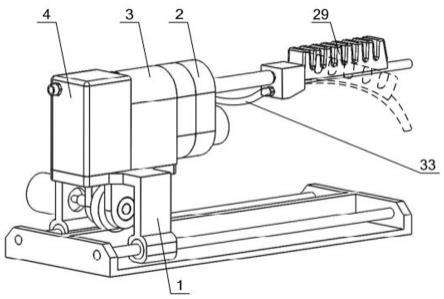
23.如图1、图3所示,本实施例的旋转关节2包括底座、旋转电机18、旋转传动机构及旋转轴21,底座安装于移动关节1的输出端(即移动底板8上),旋转电机18固定在底座上,旋转轴21转动安装于底座上,旋转电机18通过旋转传动机构与旋转轴21连接,驱动旋转轴21转动。本实施例的底座包括旋转底座16及电机底座17,旋转底座16与电机底座17沿移动关节1输出的移动方向并排连接在一起后共同安装在移动关节1的移动底板8上,旋转电机18固定在电机底座17上,旋转电机18的输出轴通过旋转轴承22与旋转底座16转动连接,旋转轴21分别通过旋转轴承22与旋转底座16、电机底座17转动连接;旋转传动机构位于旋转底座16与电机底座17之间。本实施例的旋转传动机构包括相互啮合的输出齿轮19及输入齿轮20,输出齿轮19连接于旋转电机18的输出轴上,旋转轴21上连接有输入齿轮20,旋转电机18驱动输出齿轮19旋转,通过输出齿轮19与输入齿轮20的啮合实现旋转轴21的转动。
24.如图1、图3及图4所示,本实施例的柔性弯曲关节3包括气动仓15、电磁阀23、气泵24及刚柔机械软指29,在移动关节1输出的移动方向上,气动仓15与刚柔机械软指29位于旋转关节2的两侧,气动仓15安装于移动关节1的输出端(即移动底板8上),电磁阀23及气泵24分别固定在气动仓15的内部,电磁阀23的一端通过气动转接头25与气泵24相连通,电磁阀23的另一端通过气动转接头25与旋转轴21的一端相连通,旋转轴21的另一端通过气动转接头25与刚柔机械软指29相连通。本实施例的刚柔机械软指29包括刚性底座30及柔性软指31,刚性底座30内部分别开设有通气管路34及通液管路35,柔性软指31的上部为形变部,形变部为中空的折叠结构,柔性软指31的下部为给液部,给液部为中空软管,形变部的内腔与给液部的内腔为相对独立的两个空间;通气管路34的一端通过气动转接头25与旋转轴21的另一端相连通,通气管路34的另一端与形变部的内腔相连通,通液管路35的一端通过液体转接头28与液体软管33相连通,通液管路35的另一端与给液部的内腔相连通;形变部的折叠结构在充入设定气压的气体后展开弯曲发生形变,进而改变给液部的末端给液口32的位置及角度,实现灵活给液。给液系统4提供的液体通过液体软管33经通液管路35流入给液部,最终从末端给液口32喷出。
25.如图1、图3及图4所示,本实施例的给液系统4包括储液仓14、供液阀26及液体软管33,储液仓14安装于移动关节1的输出端(即移动底板8上),且紧邻气动仓15,供液阀26固定在气动仓15内,供液阀26的输入端通过液体转接头28与储液仓14相连通,供液阀26的输出端通过液体转弯头27与液体软管33的一端相连通,液体软管33的另一端通过液体转接头28与通液管路35的一端相连通。储液仓14的上端固接有液体转接头28,用于及时向储液仓14内补充液体。
26.柔性软指31在移动关节1、旋转关节2及柔性弯曲关节3的作用下达到设定区域内的任意位置和角度,保证了给液系统4能够顺利给液的目标。
27.本发明的气动转接头25为市购产品,购置于乐清市司塑电气有限公司的seiso品牌气动接头,型号为pg4-4。本发明的液体转接头28为市购产品,购置于卡川尔流体科技(上海)有限公司的kamoer品牌液体接头,型号为5/32(3.9mm)。
28.本发明的工作原理为:移动关节1通过移动电机9为移动齿轮7提供动力,移动齿轮7与安装在固定底板5上的移动齿条6形成齿轮副,安装移动电机9和移动齿轮7的移动底板8通过两个滑动轴承12支撑在固定底板5上的两根滑动轴13上,移动齿轮7的旋转在齿轮副的作用下带动移动底板8沿滑动轴13做平移运动,达到长距离移动的目的。
29.旋转关节2通过旋转电机18为输出齿轮19提供动力,输出齿轮19与固定在旋转轴21上的输入齿轮20形成齿轮副,带动旋转轴21旋转,旋转轴21上安装的刚柔机械软指29随之转动,改变了刚柔机械软指29的给液方向。本发明的旋转轴21的转动角度为顺时针转动90
°
至逆时针转动90
°
,由于液体软管33及柔性软指31的下部均为软管,不会影响旋转轴21的转动。
30.柔性弯曲关节3通过电磁阀23控制气泵24的输出气体压力为柔性软指31提供动力,从而改变柔性软指31的弯曲角度;由电磁阀23到柔性软指31的气体通路由中空的旋转轴21和刚性底座30上的通气管路34提供,减少了附带的气管,使得结构精简,易于安装更换。
31.给液系统4通过供液阀26按需求控制储液仓14液体的输出流量;由供液阀26到末端给液口32的液体通路由液体软管33、刚性底座30上的通液管路35及柔性软指31提供,末端给液口32与柔性软指31的一体化设计,使得结构紧凑,模块化程度高;储液仓14上端固定的液体转接头28,用以及时补充其内部液体。
32.末端给液口32在移动关节1、旋转关节2及柔性弯曲关节3的共同作用下能够达到预定位置和角度,应用范围广;刚柔机械软指29由刚体和软体共同组成,可通过3d打印技术实现,实现轻量化、模块化的目标。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。