1.本发明涉及眼科治疗技术领域,具体涉及一种基于导航系统辅助软晶体悬吊术手术方法。
背景技术:
2.白内障手术超声乳化混浊晶状体后需将人工晶体植入囊袋内,以达到良好的术后视力,但是,外伤、手术、先天性等原因都可造成晶状体囊袋缺失,导致人工晶体无法植入囊袋内,需将人工晶体通过其他的方法植入眼内,其中包括前房人工晶体、虹膜固定人工晶体、巩膜固定人工晶体,目前应用最广、安全性最高的是巩膜固定人工晶体。随着手术方式的不断改进,人们在关注视力改善的同时,对视觉质量的要求也逐渐提高。
3.术中导航系统的发明使用是应用于屈光性白内障手术,术中通过角膜缘切口及散光轴线的标示,指导散光型人工晶体的使用。导航系统优势在于,其对散光轴向的定位是利用患者术前坐位检查的数据导入导航系统,再根据结膜血管匹配术眼后直接来投射定位,对于水平轴向和散光轴向的定位标准前后一致,减少了手动标记水平轴向和角膜散光轴向的误差,也减少了bell现象的误差,有更高的准确性。
4.目前,人工晶体悬吊术存在植入的人工晶体位置倾斜、偏中心的问题,影响术后视觉质量。针对该问题,现有的技术方案包括以下几点:
5.1、超声生物显微镜协助下折叠人工晶体单襻悬吊术,术前应用超声生物显微镜了解睫状沟形态,确定悬吊线进针位置及走行,使人工晶体襻更易植入睫状沟;
6.2、改为三片人工晶体植入睫状沟,如acrysof ma60ac(alcon,fort worth,tx),稳定性更强,但是需要残余部分囊袋,否则无法支撑;
7.3、改变人工晶体放置位置,包括前房人工晶体、虹膜固定人工晶体,但因其不符合生理位置,有长期慢性损伤角膜内皮的风险,同时房角固定型人工晶体即便位置良好,都会与睫状体的色素膜组织接触,进而可能导致慢性睫状体炎、黄斑囊样水肿等,同时还存在术后光晕、光弧或者边缘炫光等不良视觉症状出现;
8.4、改变人工晶体巩膜缝合方式。用“四点固定法”将四襻悬吊式后房型人工晶状体植入无晶体眼内,可能降低缝线结扎位置滑脱襻顶部而导致人工晶体偏位。
9.但是,超声生物显微镜协助下折叠人工晶体单襻悬吊术,三片人工晶体植入睫状沟,前房人工晶体、虹膜固定人工晶体,“四点固定法”缝合方式。它们最大的缺点是仍旧没有从根本上解决人工晶体偏斜的问题,采用术前超声生物显微镜了解睫状沟形态,确定悬吊线进针位置及走行,改变人工晶体类型及缝合方式,仍旧需要术中手动标记缝合点及轴线,但凡手动的地方,必定存在误差,通过术中角膜标记确定轴位,轴位便是人工晶体缝合时的参考轴线,但此种方法因无法确定角膜中心点,所以存在标记不准确、偏斜等问题,影响术后视力及视觉质量。另外,改变人工晶体放置位置、使得人工晶体无法放置于生理位置,将导致慢性睫状体炎、黄斑囊样水肿、眩光、光晕等并发症的问题。
10.因此,发明一种基于导航系统辅助软晶体悬吊术手术方法来解决上述问题很有必
要。
技术实现要素:
11.本发明的目的是提供一种基于导航系统辅助软晶体悬吊术手术方法,以解决现有技术中存在的通过术中角膜标记确定轴位,无法确定角膜中心点,所以存在标记不准确、偏斜等问题,影响术后视力及视觉质量以及改变人工晶体放置位置、使得人工晶体无法放置于生理位置,将导致慢性睫状体炎、黄斑囊样水肿、眩光、光晕等并发症的问题。
12.为了实现上述目的,本发明提供如下技术方案:一种基于导航系统辅助软晶体悬吊术手术方法,包括callisto eye导航系统,所述callisto eye导航系统的连接端电性连接有辅助光线发射器,所述辅助光线发射器用于发射辅助轴线、角膜缘穿刺口辅助线和辅助环光线,具体操作步骤为:
13.步骤一:检查callisto eye导航系统设置参数,检查callisto eye导航系统相关设备位置和工作状态,确认设备一切正常运行;
14.步骤二:患者准备手术前使用生理盐水清洗眼部,并使用撑眼器撑开上下眼皮,将与callisto eye导航系统电性连接的辅助光线发射器的发射端口对准眼部;
15.步骤三:手术开始时,callisto eye导航系统自动识别人眼结膜血管,callisto eye导航系统设置90
°
的轴位方向,术中视野中出现全程跟踪的纵行轴线,作为悬吊线进出针的方向,在纵行轴线两侧对称标识巩膜隧道位置点,并做巩膜隧道;
16.步骤四:callisto eye导航系统设置135
°
和45
°
方向的切口位置,切口位置处标识切口弧线,术中视野切口弧线位置制作两个角膜切口;
17.步骤五:距离晶体襻末端3mm位置缝合悬吊缝线,将人工晶体从其中一个角膜切口植入并调整人工晶体的角度和位置;
18.步骤六:callisto eye导航系统提前设置6mm大小辅助环,将辅助环与人工晶体光学区对应,以人工晶体光学区是否完全在辅助环内为参考,调整悬吊缝线的松紧,使人工晶体位置居中,进行缝合。
19.优选的,所述callisto eye导航系统具体设置为蔡司callisto eye手术导航系统。
20.优选的,所述步骤三中两个巩膜隧道口分别位于角膜缘两侧3mm位置处。
21.优选的,所述切口弧线贴合角膜缘,且切口弧线长度设置为2.2mm。
22.优选的,所述步骤四、步骤五和步骤六中切口弧线和辅助环全程跟踪人体角膜位置。
23.在上述技术方案中,本发明提供的技术效果和优点:
24.1、通过借助callisto eye导航系统的辅助定位功能,采用术中导航系统辅助,利用患者术前坐位检查的数据导入导航系统,再根据结膜血管匹配术眼后直接来投射定位与自动识别角膜中心点,手术视野中垂直轴线全程追随、定位,辅助做巩膜口,悬吊线穿入等,最后悬吊线缝合时,通过观察人工晶体边缘是否正好卡在6mm居中性的辅助环上,调节最后缝线的松紧,使人工晶体位置居中性最佳,实现了无需更换人工晶体及人工晶体放置位置,而将人工晶体悬吊于原始的生理位置,便于人工晶体度数选择,生理位置可产生最佳的视觉效果;
25.2、通过采用导航系统替代术中手动标识,增加标识的准确性及有效性,导航系统的辅助标识是根据术前采集的结膜血管自动匹配,术中全程跟踪,极大的提高了准确性和手术安全性,降低了医生的工作强度,避免因人工晶体无法放置于生理位置导致的并发症问题,且降低了患者的伤痛。
附图说明
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
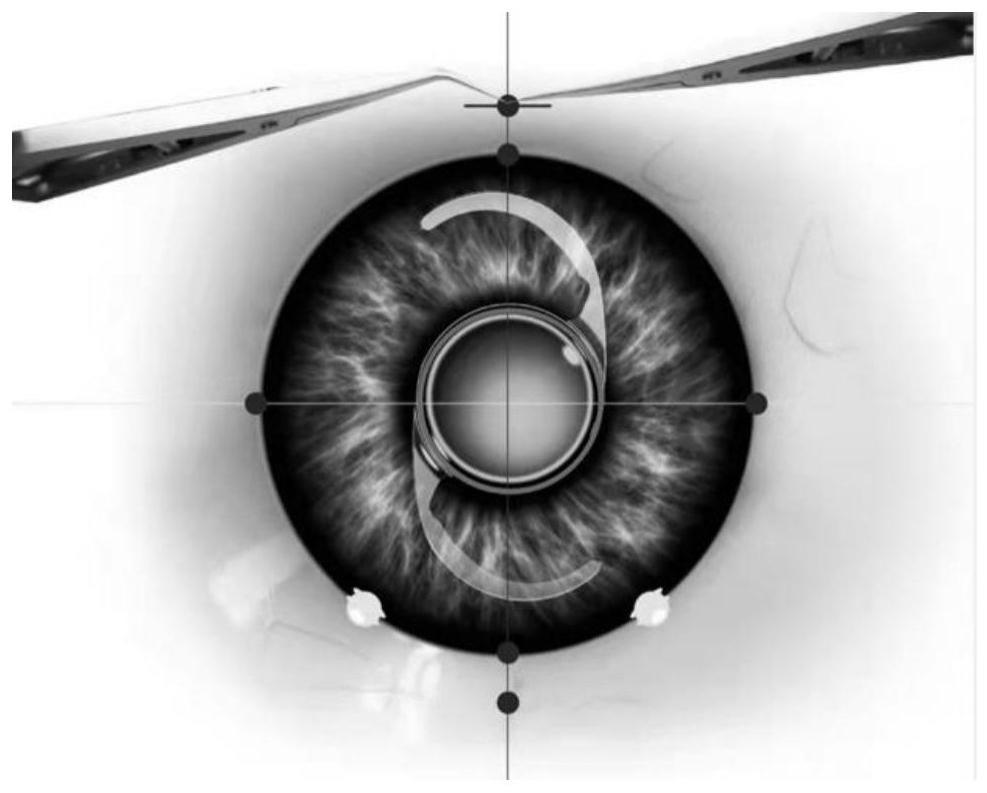
27.图1为本发明纵行轴线跟踪及巩膜隧道位置点标识示意图;
28.图2为本发明切口弧线跟随和角膜切口步骤手术参照示意图;
29.图3为本发明人工晶体植入步骤手术参照示意图;
30.图4为本发明辅助环配合人工晶体定位步骤手术参照示意图。
具体实施方式
31.为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
32.本发明提供了如图1-4所示的一种基于导航系统辅助软晶体悬吊术手术方法,包括callisto eye导航系统,所述callisto eye导航系统的连接端电性连接有辅助光线发射器,所述辅助光线发射器用于发射辅助轴线、角膜缘穿刺口辅助线和辅助环光线,具体操作步骤为:
33.步骤一:检查callisto eye导航系统设置参数,检查callisto eye导航系统相关设备位置和工作状态,确认设备一切正常运行;
34.步骤二:患者准备手术前使用生理盐水清洗眼部,去除眼部异物和干涩感,并使用撑眼器撑开上下眼皮,撑眼器避免干扰手术区域,将与callisto eye导航系统电性连接的辅助光线发射器的发射端口对准眼部;
35.步骤三:手术开始时,callisto eye导航系统自动识别人眼结膜血管,callisto eye导航系统设置90
°
的轴位方向,术中视野中出现全程跟踪的纵行轴线,作为悬吊线进出针的方向,在纵行轴线两侧对称标识巩膜隧道位置点,两个巩膜隧道口分别位于角膜缘两侧3mm位置处,并做巩膜隧道;
36.步骤四:callisto eye导航系统设置135
°
和45
°
方向的切口位置,切口位置处标识切口弧线,切口弧线贴合角膜缘,且切口弧线长度设置为2.2mm,术中视野切口弧线位置制作两个角膜切口,切口弧线全程跟踪人体角膜位置;
37.步骤五:距离晶体襻末端3mm位置缝合悬吊缝线,将人工晶体从其中一个角膜切口植入并调整人工晶体的角度和位置;
38.步骤六:callisto eye导航系统提前设置6mm大小辅助环,将辅助环与人工晶体光学区对应,以人工晶体光学区是否完全在辅助环内为参考,调整悬吊缝线的松紧,辅助环全程跟踪人体角膜位置,使人工晶体位置居中,进行缝合。
39.所述callisto eye导航系统具体设置为蔡司callisto eye手术导航系统,该系统具有生物识别技术,全程计算机辅助设计,从生物测量数据无缝传输到无痕标记、到术中实时动眼跟踪与精准的镜下导航,将蔡司iol master生物测量仪测得的生物学参数,直接与手术中的患者眼部图像做精准的匹配,不再使用传统的手工标记,简化操作,实时追踪,全面定位,例如切口大小及定位,人工晶体中心定位、撕囊导航、角巩膜缘松解,散光轴位定位,导航系统通过术前设置,自动识别角膜中心点,手术视野中角膜上出现垂直轴线,手术过程中可全程追随、定位,辅助做巩膜口,悬吊线穿入等,最后悬吊线缝合时松紧掌握很重要,既往通过肉眼观察,人工晶体位置是否居中,误差往往很大,导航系统中,提前设置6mm居中性的辅助环,通过观察人工晶体边缘是否正好卡在辅助环上,调节最后缝线的松紧,使人工晶体位置居中。
40.本手术方法借助callisto eye导航系统的辅助定位功能,采用术中导航系统辅助,利用患者术前坐位检查的数据导入导航系统,再根据结膜血管匹配术眼后直接来投射定位与自动识别角膜中心点,手术视野中垂直轴线全程追随、定位,辅助做巩膜口,悬吊线穿入等,最后悬吊线缝合时,通过观察人工晶体边缘是否正好卡在6mm居中性的辅助环上,调节最后缝线的松紧,使人工晶体位置居中性最佳,实现了无需更换人工晶体及人工晶体放置位置,而将人工晶体悬吊于原始的生理位置,便于人工晶体度数选择,生理位置可产生最佳的视觉效果,采用导航系统替代术中手动标识,增加标识的准确性及有效性,导航系统的辅助标识是根据术前采集的结膜血管自动匹配,术中全程跟踪,极大的提高了准确性和手术安全性,降低了医生的工作强度。
41.以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。