1.本发明涉及异常情况数据检测与分析的技术领域,具体为一种智能摔倒检测平台。
背景技术:
2.老年人在日常生活中最大的意外伤害以及疾病困扰来源于摔倒,而摔倒是老年人独自居家或一人外出时,极容易发生的事故,且发生时难以及时获得救助,因此需要一种能够为老年人的安全保驾护航的设备。
3.目前,市面上针对于老年人的智能设备较多,例如智能数字手表、智能手环、智能脚环等,这些设备能够提供定位、紧急呼叫与自动报警的功能,有的还能够提供简单的摔倒检测功能。但是由于人手上与脚上的动作幅度较大、动作种类较多,给姿态行为的检测带来了麻烦,使得现有设备对摔倒检测的精度较低。为了提高检测精度,以及腰部动作较少,出现了腰间佩戴的智能设备,并考虑多点检测的方式,出现了分布式的可佩戴设备,但上述设备存在以下缺点:设备集成了复杂的姿态解算算法,导致设备的功耗大,使用时需要频繁充电,且设备穿戴复杂,容易被忘记,这些缺点对老年人的使用带来了极大的困难。
技术实现要素:
4.本发明意在提供一种智能摔倒检测平台,以解决现有技术中摔倒检测设备功耗大、精度低的技术问题。
5.本发明提供如下基础方案:
6.一种智能摔倒检测平台,包括用于使用者佩戴的智能终端,智能终端用于待机模式下获取并解析姿态数据,当姿态数据异常时,进入工作模式;还用于工作模式下发送异常的姿态数据,并接收根据异常的姿态数据反馈的摔倒判定结果。
7.基础方案的有益效果:
8.1、本方案中,智能终端包括多种模式,待机模式下,智能终端仅对使用者的姿态数据进行采集和解析,其余功能处于休眠状态,从而降低智能终端的功耗。
9.2、本方案中,智能终端仅对姿态数据的异常进行判断,在姿态数据出现异常时,发送异常数据给远端,由远端设备对异常的姿态数据进一步解算分析。将姿态数据的摔倒分析放在远端进行,智能终端无需进行复杂的姿态解算,进一步降低智能终端的功耗。
10.3、本方案中,在远端对使用者的姿态进行解算分析,能够提供更多计算资源,对姿态解算算法的复杂度、所占用空间等要求更低,可优选精度更高的算法,例如人工智能算法,从而提高摔倒检测的检测精度。
11.进一步,智能终端包括主控模块,主控模块预设有判别阈值,主控模块用于根据判别阈值判断姿态数据是否异常,当姿态数据位于判别阈值外,判定姿态数据异常。
12.有益效果:本方案中,智能终端通过判别阈值的设置,对使用者的姿态进行预分析判断,筛选出大幅度动作,一是快速识别非摔倒姿态,提高摔倒检测的响应速度;二是剔除
非摔倒姿态,降低后续姿态解算的工作量,提高检测效率。
13.进一步,还包括远程服务器,远程服务器用于接收异常的姿态数据,对姿态数据进行频域分析和时域分析,并根据频域分析结果和时域分析结果生成摔倒判定结果。
14.有益效果:本方案中,通过远程服务器对异常的姿态数据进一步解算分析,解算时分别从频域和时域两个方向进行摔倒行为检测,与现有技术中直接从姿态数据进行分析相比,分析维度更多,最终摔倒判定结果的准确度更高,即提高摔倒检测的检测精度。
15.进一步,远程服务器预设有频域svm分类器和时域lstm分类器,远程服务器用于根据频域svm分类器进行频域分析,根据时域lstm分类器进行时域分析。
16.有益效果:本方案中,频域分析和时域分析采用不同的分类器,svm分类器支持学习到动作向量的划分边界,能够实现摔倒行为的快速检测,lstm分类器支持长短期记忆神经网络学习,能够更好的分析数据时序间的关系,以弥补svm分类器的不足,提高摔倒行为的检测精度。
17.进一步,智能终端还用于获取当前定位信息,根据摔倒判定结果上传当前定位信息。
18.有益效果:本方案中,通过智能终端获取当前定位信息,得知使用者的所在位置,在使用者发生摔倒行为时,能够及时对其进行救助。
19.进一步,智能终端还用于获取并存储强信号下的强定位信息;还用于获取并存储惯性数据;还用于上传当前定位信息时,上传强定位信息和惯性数据。
20.有益效果:使用者的摔倒行为可能发生在信号较弱的区域,此时智能终端的定位精度不高,可能出现定位不准的情况,因此本方案中,在上传当前定位信息时,还上传此前信号较强时所采集的强定位信息,以及采集该强定位信息后的惯性数据,通过强定位信息和惯性数据能够对使用者的当前位置进行预测,从而获得更为准确的使用者位置信息,使得使用者能够得到及时的救助。
21.进一步,摔倒判定结果包括摔倒类型,摔倒类型包括一般性摔倒和意识丧失型摔倒,远程服务器还用于根据摔倒类型触发相应报警。
22.有益效果:使用者为老年人,其摔倒后极可能出现两种情况,一是摔倒后能自由活动,即一般性摔倒;二是摔倒后处于静止状态,即意识丧失型摔倒,意识丧失型摔倒于一般性摔倒而言更危险,所需救助更为紧急。因此远程服务器能够根据摔倒类型触发相应报警,从而及时作出相应反馈。
23.进一步,远程服务器包括分类训练模块,分类训练模块用于获取样本数据,根据样本数据中的标注提取正样本,并提取标注以外的数据为负样本;还用于对正负样本划分训练集和测试集,根据训练集中的正负样本训练频域svm分类器和时域lstm分类器,根据测试集中的正负样本测试频域svm分类器和时域lstm分类器;远程服务器用于调用训练后的频域svm分类器和时域lstm分类器进行频域分析和时域分析。
24.有益效果:本方案中,通过远程服务器获取样本数据,并根据样本数据进行训练,获得最终高精度的频域svm分类器和时域lstm分类器。在划分正负样本时,对样本数据进行标注,例如标注样本数据中摔倒动作开始和结束时间点,根据标注从样本数据中提取正样本,从未被提取的样本数据中提取负样本,无需分别收集正样本数据和负样本数据,降低样本数据采集的工作量。
25.进一步,分类训练模块还用于根据样本数据建立词典,词典包括多个词语;分类训练模块还用于根据训练集中的数据在词典中搜寻对应的词语,搜寻到的词语为多个,统计搜寻到各词语的次数,获得对应数据的计数特征,归一化作为频域特征,根据频域特征训练频域svm分类器。
26.有益效果:本方案中,通过聚类分析建立词典,通过词典中的词语在训练集中的数据中出现的频率进行归一化分析获得频域特征,以此作为样本对频域svm分类器进行训练。
27.进一步,分类训练模块还用于对正样本进行扩充,包括随机采样和随机提升采样率。
28.有益效果:随机采样为在涵盖正样本的时间窗内进行随机采样,将开始和结束时间点包含正样本的所有采样结果视为正样本;提升随机采集率为对摔倒动作持续时长较长的样本数据,提升其随机采样率,通过线性插值对样本数据实现倍速采样,模拟发生过程更为迅速的摔倒过程。通过随机采样和随机提升采样率提升正样本数量,对频域svm分类器和时域lstm分类器进行充分训练。
附图说明
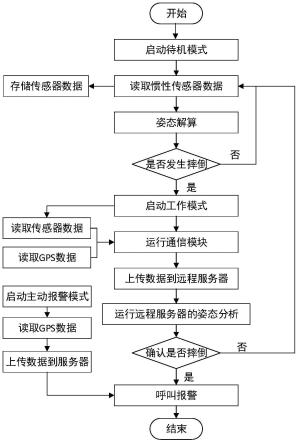
29.图1为本发明一种智能摔倒检测平台实施例的流程图;
30.图2为本发明一种智能摔倒检测平台实施例的摔倒检测示意图;
31.图3为本发明一种智能摔倒检测平台实施例的部分原始数据示意图;
32.图4为本发明一种智能摔倒检测平台实施例的原始数据与标注时间窗对比图。
具体实施方式
33.下面通过具体实施方式进一步详细说明:
34.实施例
35.一种智能摔倒检测平台,包括远程服务器,以及用于使用者佩戴的智能终端,智能终端用于佩戴在使用者腰部。
36.智能终端包括三种模式,一是待机模式,在智能终端的日常使用中,智能终端均处于待机模式,此时智能终端仅对使用者的姿态数据进行采集和解析,其余功能处于休眠状态;二是工作模式,当智能终端解析出姿态数据异常时,进入工作模式,此时智能终端所有功能均处于运行状态;三是主动报警模式,智能终端上设有报警键,使用者按压报警键,则进入主动报警模式,此时智能终端主动循环发送警报信号,并上传使用者的位置信息,直到接收到远程服务器反馈的处理信号,也可通过按压智能终端上的取消报警键进行取消。
37.如附图1所示,智能终端用于待机模式下获取并解析姿态数据,具体的,智能终端包括惯性传感器模块,惯性传感器模块用于获取并解析使用者的姿态数据,姿态数据包括位置、速度、角度、角速度、加速度。在本实施例中,惯性传感器模块采用陀螺仪和加速度计,所获取的姿态数据包括角速度和加速度。
38.智能终端用于当姿态数据异常时,进入工作模式,具体的,智能终端包括主控模块,主控模块预设有判别阈值,主控模块用于根据判别阈值判断姿态数据是否异常,当姿态数据位于判别阈值外,判定姿态数据异常,此时进入工作模式。通过判别阈值筛选出疑似摔倒行为的姿态数据序列,便于后续发送远程服务器进行解算。主控模块还用于对惯性传感
器模块的初始状态进行配置和姿态矫正,还用于对后续定位模块进行初始化配置和搜星确认。
39.智能终端还用于工作模式下发送异常的姿态数据,远程服务器用于接收异常的姿态数据,对姿态数据进行频域分析和时域分析,并根据频域分析结果和时域分析结果生成摔倒判定结果。在本实施例中,远程服务器预设有频域svm分类器和时域lstm分类器,远程服务器用于根据频域svm分类器进行频域分析,根据时域lstm分类器进行时域分析。如附图2所示。
40.具体的,远程服务器包括频域分析模块、时域分析模块和综合分析模块,频域分析模块用于调用频域svm分类器;还用于从异常的姿态数据中获取频域信号,将频域信号输入频域svm分类器,获取频域svm分类器根据频域信号输出的频域分析结果。通过频域分析异常姿态数据对应的行为,为规律性大幅度运动(如锻炼等)或是偶发性大幅度运动(跌倒等),如分类为偶发性,则给出倾向于跌倒的打分。
41.时域分析模块用于调用时域lstm分类器;还用于从异常的姿态数据中获取时域信号,将时域信号输入时域lstm分类器,获取时域lstm分类器根据频域信号输出的时域分析结果。例如获取定位与传感模块在时间段t(t=5s)内的时序信号x作为输入,xi=(x1,x2,...,xm,),x
1-x3对应三轴加速度,x4对应角速度幅值,输出y
1-y4均为预测结果(
‘
摔倒’或
‘
非摔倒’),通过提取各轴时序信息的融合特征,通过非线性变换预测出当前动作是否为摔倒行为。
42.综合分析模块用于根据频域分析结果和时域分析结果生成摔倒判定结果,摔倒判定结果包括是否摔倒和摔倒类型,摔倒类型包括一般性摔倒和意识丧失型摔倒。具体的,综合分析模块用于根据频域分析结果和时域分析结果生成摔倒判定结果,并根据摔倒发生后的静止时间判断摔倒类型是否为意识丧失型摔倒。一般性摔倒是指摔倒后能自由活动,更为危险的意识丧失型摔倒是指摔倒后处于静止状态。
43.远程服务器还用于根据摔倒类型触发相应报警,通过远程服务器分析摔倒的轻重程度向智能终端或关联的监护人终端发送对应的报警信息。
44.智能终端还用于接收根据异常的姿态数据反馈的摔倒判定结果;还用于获取当前定位信息,智能终端还用于获取并存储强信号下的强定位信息,还用于获取并存储惯性数据。在本实施例中,姿态数据为惯性数据。具体的,智能终端还包括定位模块和存储模块,定位模块还用于对使用者进行位置监测,获取当前定位信息,若当前定位信息为强信号下获取的,则将当前定位信息作为强定位信息进行存储,在获取强定位信息后,对获取的惯性数据进行存储。在本实施例中,定位模块室内采用wifi、蓝牙定位,室外采用北斗/gps等导航服务。存储模块用于存储并更新强定位信息和惯性数据。信号较弱的区域,此时智能终端的定位精度不高,可能出现定位不准的情况,因此本方案中,还对此前信号较强时所采集的强定位信息,以及采集该强定位信息后的惯性数据进行获取和存储。
45.智能终端还用于根据摔倒判定结果上传当前定位信息,还用于上传当前定位信息时,上传强定位信息和惯性数据。具体的,智能终端还包括通信模块,通信模块用于当摔倒判定结果为摔倒时,上传当前定位信息,以及强定位信息和惯性数据。通过强定位信息和惯性数据能够对使用者的当前位置进行预测,通过预测的位置信息和当前定位信息,能够获得更为准确的使用者位置信息,使得使用者能够得到及时的救助。
46.实施例二
47.本实施例与实施例一的不同之处在于:还包括对频域svm分类器和时域lstm分类器的训练。
48.远程服务器包括分类训练模块,分类训练模块用于获取样本数据,具体的,选用不同身高体重的测试人员佩戴惯性传感器,在防护下进行各类真实摔倒行为模拟,以及在多种场所进行日常行为模拟,包括平地、座椅、楼梯间等,最终采集到包括所需正负样本的原始数据。在本实施例中,样本数据仅采用有数值变化的9组数据描述该时间点的惯性特征,分别为三轴加速度(accx,accy,accz)、三轴角速度(gyrx,gyry,gyrz),以及三轴旋转角(roll,pitch,yaw),惯性传感器采样频率为100hz,即一个5秒的序列原始数据序列长度为5*100*9,部分原始数据如附图3所示。
49.在本实施例中,正样本为包含摔倒行为的数据,包括1-1摔倒成侧躺(侧面身体着地),1-2摔倒成侧卧(侧面身体部分着地手做一点支撑),1-3摔倒成面朝下(摔倒后平趴),1-4摔倒成面朝上(背部着地摔倒),1-5摔屁股蹲(屁股着地摔倒),1-6椅子向后靠摔倒,1-7从椅子上滑落地上坐摔,1-8扶墙滑倒(膝盖一软摔倒),1-9摔倒成跪姿,1-10摔倒成跪趴姿势。负样本为日常行为的数据,包括2-1走路(直行 转弯),2-2跑步(不同速度),2-3其他走路(正步走、高抬腿、扭腰走、弓着腰慢慢走、拖着一条腿一瘸一拐走等非正常行走),2-4上下楼梯,2-5蹲下系鞋带,2-6蹲下(模仿入厕),2-7蹲下坐在小板凳上,2-8坐沙发(坐姿更随意些),2-9坐椅子(正襟危坐),2-10席地坐下,2-11平躺躺倒(缓慢躺倒),2-12侧躺躺倒,2-13向后躺倒,2-14弯腰做洗手动作,2-15伸手做拉伸动作,2-16向前、后、左、右侧下腰拉伸,2-17弯腰做拖地、扫地动作,2-18弯腰做擦桌子动作。
50.分类训练模块还用于根据样本数据中的标注提取正样本,并提取标注以外的数据为负样本。对样本数据中摔倒行为的开始和结束时间点进行标注,标注时间窗内的数据为正样本,其余为负样本,如附图4所示,图4中左图为原始30s序列,右图为摔倒行为的标注结果。
51.分类训练模块还用于对正样本进行扩充,包括随机采样和随机提升采样率。随机采样为在涵盖正样本的标注时间窗内进行随机采样,将开始和结束时间点包含正样本的所有采样结果视为正样本;提升随机采集率为对摔倒动作持续时长较长的样本数据,例如大于3s的序列,提升其随机采样率,通过线性插值对样本数据实现倍速采样,例如1.1-1.5倍数采样,模拟发生过程更为迅速的摔倒过程。通过随机采样和随机提升采样率对正样本进行两种形式的扩充,提升正样本数量。
52.分类训练模块还用于对正负样本划分训练集和测试集,具体的,按80%训练20%测试的比例划分正负样本,在本实施例中,测试人员为n人,随机选取其中n*20%人对应的正负样本作为测试集,其余人所对应的正负样本为训练集。
53.分类训练模块还用于根据训练集中的正负样本训练频域svm分类器和时域lstm分类器,根据测试集中的正负样本测试频域svm分类器和时域lstm分类器。
54.对频域svm分类器进行训练和测试时,分类训练模块还用于根据样本数据建立词典,词典包括多个词语;分类训练模块还用于根据训练集中的数据在词典中搜寻对应的词语,搜寻到的词语为多个,统计搜寻到各词语的次数,获得对应数据的计数特征,归一化作为频域特征,根据频域特征训练svm分类器。具体的,根据样本数据建立词典为:提取正负样
本的频域数据裁剪为等长的片段,通过离散傅里叶变换提取片段的幅值,根据幅值大小进行排序,根据预设值n筛选排序前n%的频域数据;获取筛选出的频域数据的聚类特征构成三维数据特征;获取所有三维数据特征,根据kmeans聚类方法聚类多个聚类中心点,根据频率将聚类中心点进行排列生成词典。
55.在本实施例中,对频域svm分类器进行训练和测试时,包括以下内容:
56.(1)建立词典:在训练集中,将惯性传感器加速度幅值信号裁剪为等长为500的片段,通过离散傅里叶变换提取其幅度值,只保留每片段大小排行前10%的频域信号,然后每个保留点对应的幅值、相位、频率组成三维数据特征;综合训练集中所有数据的三维特征,通过kmeans聚类方法聚类获得多个聚类中心点,将其按照频率排列作为
‘
词典’特征。
57.(2)提取特征:对于测试集和训练集,同样将其裁剪为500长度片段并提取离散傅里叶变换,保留幅值40%的点,提取这些点的幅值、相位、频率的三维数据特征,提取大小为200的计数特征,为每个保留点的特征寻找距离最近的词语(词典中的每个特征为一个词语),并在相应词语位置数量加一,获得整个片段的计数特征,并将其归一化作为频域特征。
58.(3)训练分类器:对训练集每个数据执行提取特征的操作获得200*1大小的频域特征,使用频域特征与数据对应的标签训练svm分类器,正样本对应的标签为摔倒,负样本对应的标签为非摔倒。
59.(4)测试分类器:对测试集中的每个数据执行提取特征的操作,输入训练好的svm分类器,得出预测倾向于跌倒的得分。
60.对时域lstm分类器进行训练和测试时,直接采用惯性传感器的三轴加速度信号与角速度幅值信号融合作为输入,且使用长短期记忆神经网络lstm分类器,其性能优于传统神经网络、svm分类器等。
61.远程服务器用于调用训练后的频域svm分类器和时域lstm分类器进行频域分析和时域分析。
62.采用本方案,对频域svm分类器和时域lstm分类器进行训练后的性能如表一、三所示,表中检出率为被判为摔倒行为的摔倒行为样本数/总摔倒行为样本数,虚警率为被判为摔倒行为的非摔倒行为样本数/总非摔倒行为样本数。
63.表一频域svm分类器性能
64.[0065][0066]
表二时域lstm分类器性能
[0067][0068]
如表一所示,频域svm分类器最佳配置参数下检出率96.0%,虚警率5.6%,如表二所示,时域lstm分类器最佳配置参数下检出率96.7%,虚警率5.2%。融合频域svm分类器和时域lstm分类器后,摔倒检测整体检出率为98.9%,虚警率为1.7%。摔倒行为检测的检测精度远远优于当前市场上的产品。
[0069]
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术
的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。