1.本实用新型涉及车辆技术领域,具体而言,涉及一种后悬架系统及具有其的车辆。
背景技术:
2.目前,乘用车悬架的装备趋向于智能化、电控化,悬架系统的智能电控执行机构相较于传统零部件体积庞大,且多数智能电控执行机构开发周期长,实际项目开发工作中往往会沿用成熟项目的智能电控执行机构,调整其他开发周期较短的结构部件。随着乘用车悬架性能需求的不断提升,悬架所搭载的智能电控执行机构也越来越多。另一方面,对乘用车乘员空间的需求也越来越严苛,这就造成了悬架系统性能与乘员空间之间一定的矛盾。对功能丰富、结构紧凑的悬架的研究,成为了一个必须直面的课题。
3.现有的悬架布置,大都没有考虑搭载更多的智能电控执行机构,无法应用在未来装备许多智能电控执行机构的场景中,现有的悬架系统布局不够合理,悬架系统占用整车的空间大。
技术实现要素:
4.本实用新型的主要目的在于提供一种后悬架系统及具有其的车辆,以解决现有技术中悬架系统占用整车的空间大的问题。
5.为了实现上述目的,根据本实用新型的一个方面,提供了一种后悬架系统,包括转向节,转向节的中部开设有连接孔,转向节包括制动钳连接支架,转向节上位于制动钳连接支架的一端设置有第一安装位,第一安装位用于安装上控制臂,沿上控制臂的长度方向的轴线与连接孔的轴线具有第一夹角地设置,第一夹角为α,其中,25
°
≤α≤35
°
。
6.进一步地,转向节具有第一侧壁、第二侧壁、第三侧壁和第四侧壁,第一侧壁、第二侧壁、第三侧壁和第四侧壁沿连接孔的的周向方向设置,且第一侧壁的第二端与第二侧壁的第一端连接,第二侧壁的第二端与第三侧壁的第一端连接,第三侧壁的第二端与第一侧壁的第一端连接,其中,第一侧壁与第三侧壁相对设置,第二侧壁与第四侧壁相对设置,第一安装位设置于第一侧壁的外侧。
7.进一步地,制动钳连接支架包括两个连接凸起,两个连接凸起中的一个连接凸起设置于第一侧壁和第二侧壁的连接处,两个连接凸起中的另一个连接凸起设置于第二侧壁上,且两个连接凸起均具有工作面,连接凸起的工作面所在的平面具有夹角地设置。
8.进一步地,转向节上位于制动钳连接支架的一端设置有两个凸耳,两个凸耳相对地设置,两个凸耳之间形成第一安装位。
9.进一步地,转向节还包括梯形臂连接杆,梯形臂连接杆位于制动钳连接支架的内侧,且梯形臂连接杆设置于第二侧壁上。
10.进一步地,转向节上位于制动钳连接支架的另一端设置有第二安装位,且第二安装位设置于第三侧壁的第二端上,并远离制动钳连接支架和梯形臂连接杆设置,梯形臂连接杆及第二安装位用于安装梯形臂。
11.进一步地,转向节还包括悬臂,悬臂设置于第四侧壁上,悬臂的安装面与连接孔的轴线具有夹角地设置,且悬臂与梯形臂连接杆相对设置,悬臂上设置有第三安装位,第三安装位用于安装前束控制臂,沿前束控制臂的长度方向的轴线与连接孔的轴线具有第二夹角地设置,第二夹角为β,其中,15
°
≤β≤25
°
。
12.进一步地,α为30
°
。
13.进一步地,β为20
°
。
14.根据本实用新型的另一方面,提供了一种车辆,包括后悬架系统,后悬架系统为上述的后悬架系统。
15.应用本实用新型的技术方案,通过在转向节的中部开设有连接孔,转向节包括制动钳连接支架,在转向节上位于制动钳连接支架的一端设置有第一安装位,通过第一安装位安装上控制臂,并且上控制臂安装以后,沿上控制臂的长度方向的轴线与连接孔的轴线具有第一夹角,其中第一夹角的角度位于25
°
至35
°
之间,从而能够给梯形臂上主动减振器和空气弹簧的安装留出更多的空间。本技术的后悬架系统结构简单、紧凑,并优化了轮边布局,而且可以搭载更多的智能电控执行机构,解决了现有技术中悬架系统占用整车的空间大的问题。
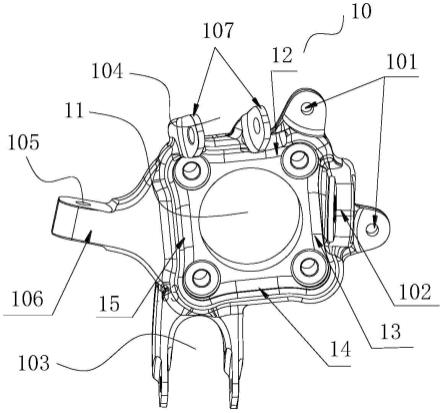
附图说明
16.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
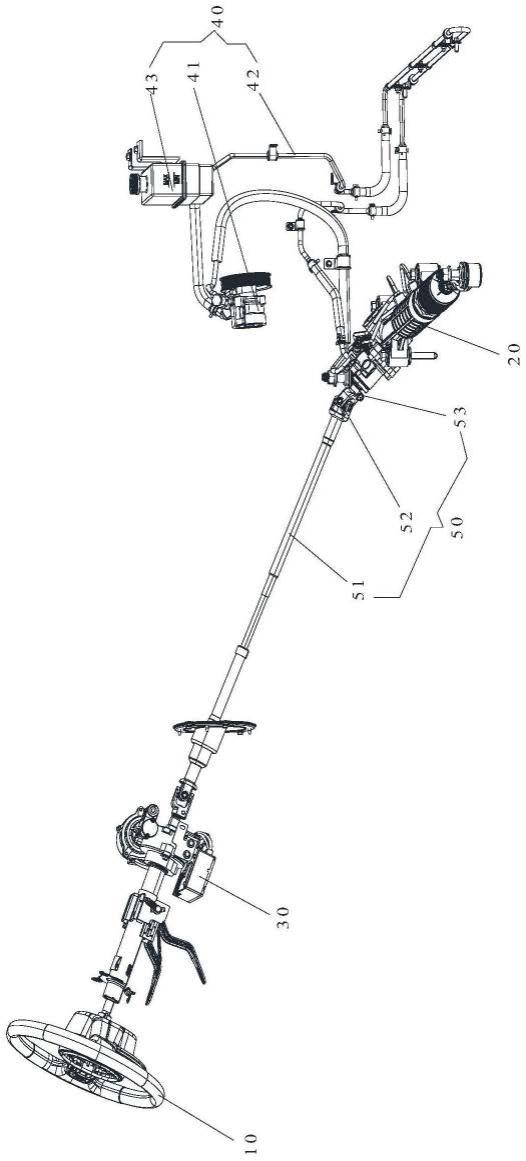
17.图1示出了根据本实用新型的后悬架系统的第一实施例的结构示意图;
18.图2示出了根据本实用新型的后悬架系统的第二实施例的结构示意图。
19.其中,上述附图包括以下附图标记:
20.10、转向节;11、连接孔;12、第一侧壁;13、第二侧壁;14、第三侧壁;15、第四侧壁;
21.101、制动钳连接支架;
22.102、梯形臂连接杆;
23.103、第二安装位;
24.104、第一安装位;
25.105、第三安装位;
26.106、悬臂;
27.107、凸耳。
具体实施方式
28.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
29.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
30.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的术语在适当情况下可以互换,以便这里描述的本技术的实施方式例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
31.现在,将参照附图更详细地描述根据本技术的示例性实施方式。然而,这些示例性实施方式可以由多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的实施方式。应当理解的是,提供这些实施方式是为了使得本技术的公开彻底且完整,并且将这些示例性实施方式的构思充分传达给本领域普通技术人员,在附图中,为了清楚起见,有可能扩大了层和区域的厚度,并且使用相同的附图标记表示相同的器件,因而将省略对它们的描述。
32.结合图1和图2所示,根据本技术的具体实施例,提供了一种后悬架系统。
33.具体地,后悬架系统包括转向节10,转向节10的中部开设有连接孔11,转向节10包括制动钳连接支架101,转向节10上位于制动钳连接支架101的一端设置有第一安装位104,第一安装位104用于安装上控制臂,沿上控制臂的长度方向的轴线与连接孔11的轴线具有第一夹角地设置,第一夹角为α,其中,25
°
≤α≤35
°
。优选地,α为30
°
。
34.应用本实施例的技术方案,通过在转向节10的中部开设有连接孔11,转向节10包括制动钳连接支架101,在转向节10上位于制动钳连接支架101的一端设置有第一安装位104,通过第一安装位104安装上控制臂,并且上控制臂安装以后,沿上控制臂的长度方向的轴线与连接孔11的轴线具有第一夹角,其中第一夹角的角度位于25
°
至35
°
之间,从而能够给梯形臂上主动减振器和空气弹簧的安装留出更多的空间。本技术的后悬架系统结构简单、紧凑,并优化了轮边布局,而且可以搭载更多的智能电控执行机构,解决了现有技术中悬架系统占用整车的空间大的问题。
35.如图1所示,转向节10具有第一侧壁12、第二侧壁13、第三侧壁14和第四侧壁15,第一侧壁12、第二侧壁13、第三侧壁14和第四侧壁15沿连接孔11的周向方向设置,且第一侧壁12的第二端与第二侧壁13的第一端连接,第二侧壁13的第二端与第三侧壁14的第一端连接,第三侧壁14的第二端与第一侧壁12的第一端连接,其中,第一侧壁12与第三侧壁14相对设置,第二侧壁13与第四侧壁15相对设置,第一安装位104设置于第一侧壁12的外侧。
36.在本技术的一个示例性实施例中,连接孔11为轮毂轴承连接部分,绕轮毂轴承连接部分的中心线周布4个球面连接孔,与球面螺栓配合连接轮毂轴承。
37.进一步地,制动钳连接支架101包括两个连接凸起,两个连接凸起中的一个连接凸起设置于第一侧壁12和第二侧壁13的连接处,两个连接凸起中的另一个连接凸起设置于第二侧壁13上,且两个连接凸起均具有工作面,连接凸起的工作面所在的平面具有夹角地设置。这样能够使得设置于第一侧壁12和第二侧壁13的连接处的连接凸起紧邻第一安装位104,从而优化了轮边布局,并使得制动钳和上控制臂都安装以后,制动钳能够紧邻上控制臂,进而节省整车空间。
38.进一步地,转向节10上位于制动钳连接支架101的一端设置有两个凸耳107,两个
凸耳107相对地设置,两个凸耳107之间形成第一安装位104。具体地,两个凸耳107均设置在第一侧壁12上。在本实施例中,通过两个凸耳107能够对上控制臂起到限位作用,保证了上控制臂的安装稳定性。
39.其中,转向节10还包括梯形臂连接杆102,梯形臂连接杆102位于制动钳连接支架101的内侧,且梯形臂连接杆102设置于第二侧壁13上。
40.进一步地,转向节10上位于制动钳连接支架101的另一端设置有第二安装位103,且第二安装位103设置于第三侧壁14的第二端上,并远离制动钳连接支架101和梯形臂连接杆102设置,梯形臂连接杆102及第二安装位103用于安装梯形臂。这样可以方便梯形臂的安装,并且可以改善梯形臂受扭转的应力分布,有利于减小梯形臂上衬套的受力。
41.进一步地,转向节10还包括悬臂106,悬臂106设置于第四侧壁15上,悬臂106的安装面与连接孔11的轴线具有夹角地设置,且悬臂106与梯形臂连接杆102相对设置,悬臂106上设置有第三安装位105,第三安装位105用于安装前束控制臂,沿前束控制臂的长度方向的轴线与连接孔11的轴线具有第二夹角地设置,第二夹角为β,其中,15
°
≤β≤25
°
。优选地,β为20
°
。在本实施例中,第三安装位105为安装孔。其中,悬臂106上第三安装位105与转向节10的连接孔11之间的距离取决于梯形臂上主动减振器和空气弹簧的尺寸大小。当前束控制臂安装以后,沿前束控制臂的长度方向的轴线与连接孔11的轴线的第二夹角为20
°
,进一步给梯形臂上主动减振器和空气弹簧的安装留出了更多空间。
42.如图2所示为本技术的后悬架系统的第二实施例的结构示意图,图2中e、f两点为上控制臂的安装点,g、h两点为前束控制臂的安装点,a、b、c、d四点为梯形臂的安装点。在此设计中使得上控制臂安装位置连接线ef与连接孔11的轴线成30度角,前束控制臂安装位置连接线gh与连接孔11的轴线成20度角,这样能够在得到紧凑的轮边布局的前提下,更多地避让出控制臂之间的空间。因此,主动减振器和空气弹簧可以布局在c、d两点连接线的上方,外侧布置主动减振器,内侧布置空气弹簧。前束控制臂后置,则后轮转向机构布置在副车架的后横梁上,与前述其他执行机构在空间上分开,装备后轮转向系统与前述其他执行机构的布置不发生任何冲突。
43.本技术的后悬架系统的弹簧与减振器分离,可以实现避让空间、优化性能的目的,并且本技术的结构简单、紧凑,优化了轮边布局。当然,也可以采用弹簧与减振器分离的多连杆后悬架系统,实现搭载后轮转向机构、主动减振器及空气弹簧的功能,但与多连杆后悬架系统相比,本技术的后悬架系统可以节省更多的空间,而且性能更优。
44.上述实施例中的后悬架系统还可以应用于车辆技术领域,即根据本技术的另一个具体实施例,提供了一种车辆,车辆包括后悬架系统,后悬架系统为上述实施例中的后悬架系统。上述实施例中的后悬架系统可以搭载更多的智能电控执行机构,而且通过优化制动钳、上控制臂、前束控制臂、梯形臂的布局,能够进一步减小该后悬架系统所占据的空间。由于车辆采用了上述实施例中的后悬架系统,从而使得车辆上后轮转向机构、主动减振器及空气弹簧的布局更加合理,有效地节省了车辆的空间,解决了现有技术中悬架系统占用整车的空间大的问题。
45.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位
之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位旋转90度或处于其他方位,并且对这里所使用的空间相对描述作出相应解释。
46.除上述以外,还需要说明的是在本说明书中所谈到的“一个实施例”、“另一个实施例”、“实施例”等,指的是结合该实施例描述的具体特征、结构或者特点包括在本技术概括性描述的至少一个实施例中。在说明书中多个地方出现同种表述不是一定指的是同一个实施例。进一步来说,结合任一实施例描述一个具体特征、结构或者特点时,所要主张的是结合其他实施例来实现这种特征、结构或者特点也落在本实用新型的范围内。
47.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
48.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。