1.本发明涉及医疗器械领域,具体地说是一种2自由度膝关节用截骨执行器。
背景技术:
2.人工全膝关节置换(tka,total knee arthroplasty)是针对膝关节疾病的一种手术治疗方式,其将膝关节的连接表面用关节假体替换,能有效治疗重度膝关节病痛,提高病人的生活质量。
3.tka操作的影响因素包括三维立体空间上的准确截骨、韧带等软组织的平衡及稳定、关节假体安放的位置和角度等。传统手术通过机械导向装置进行髓内外定位后截骨,手术者仅凭肉眼、手感和经验进行截骨操作,手术精确性难以得到一致性保证。随着科技发展,现有技术中出现了一些自动化的截骨装置,如授权公告号为cn212592301u的中国实用新型专利中就公开了一种智能截骨系统及截骨装置,该装置包括横向移动、纵向移动、深度移动等机构,该装置中设有六轴传感器,但所述六轴传感器直接安装于连接平台和安装接口座之间,所述安装接口座直接安装于手术机器人上,也即手术机器人直接通过所述六轴传感器感知该装置的力矩情况,而该装置中的截骨工具为电磨头,其安装于深度移动机构下端,与六轴传感器之间有一定距离,因此六轴传感器并不能直接感知截骨工具受力情况,而针对关节置换手术而言,其常采用大切口手术操作模式,手术损伤大,而且力反馈透明度低,tka关键的软组织平衡难以实现,没有力反馈的精确安全范围限制以及缺乏对末端执行器的约束机制,这会提高手术风险。
技术实现要素:
4.本发明的目的在于提供一种2自由度膝关节用截骨执行器,其将骨切割工具直接与六维力传感器相连,可以获得骨切割工具精准的力及力反馈,从而可以辅助系统完成切骨轨迹在线规划以及切骨轨迹跟踪,最终实现高效、安全的机器人自动切骨手术,并且本发明能够精确控制骨切割工具位移,保证手术顺利进行。
5.本发明的目的是通过以下技术方案来实现的:
6.一种2自由度膝关节用截骨执行器,包括y向移动机构、x向移动机构、六维力传感器和骨切割工具,所述y向移动机构设有y向驱动组件、y向架体和y向滑座,所述y向驱动组件和y向滑座均设于所述y向架体上,且所述y向滑座与所述y向架体滑动连接并通过所述y向驱动组件驱动移动,所述x向移动机构包括x向驱动组件、x向架体和x向滑座,所述x向架体与所述y向滑座固连,x向驱动组件和x向滑座均设于所述x向架体上,且所述x向滑座与所述x向架体滑动连接并通过所述x向驱动组件驱动移动,所述骨切割工具安装于所述x向滑座上,且所述骨切割工具与所述x向滑座之间设有六维力传感器,所述y向架体上设有限定所述y向滑座位移和方向的y向限位滑槽,在所述y向架体内设有实时监测所述y向滑座位移的y向移动传感器,所述x向架体上设有限定所述x向滑座位移和方向的x向限位滑槽,在所述x向架体内设有实时监测所述x向滑座位移的x向移动传感器。
7.所述y向驱动组件包括y向伺服电机、y向减速器、y向丝杠和y向丝母,所述y向伺服电机与y向减速器固连,所述y向减速器输出轴通过联轴器与所述y向丝杠连接,所述y向丝母套装于所述y向丝杠上,所述y向滑座与所述y向丝母固连。
8.所述y向架体上设有y向滑轨,所述y向滑座下侧设有滑块与所述y向滑轨配合。
9.所述y向架体包括y向架体面板,所述y向滑轨设于所述y向架体面板中部,所述y向架体面板一侧设有所述y向限位滑槽、另一侧与架体底板间形成y向安装开口,所述y向滑座一侧通过第一连板伸入所述y向限位滑槽中与所述y向丝母固连,另一侧通过第二连板伸入所述y向安装开口中与所述y向丝母固连,第一连板上设有导向滑块沿着所述y向限位滑槽移动。
10.所述x向驱动组件包括x向伺服电机、x向减速器、x向丝杠和x向丝母,所述x向伺服电机与x向减速器固连,所述x向减速器输出轴通过联轴器与所述x向丝杠连接,所述x向丝母套装于所述x向丝杠上,所述x向滑座与所述x向丝母固连。
11.所述x向架体上设有x向滑轨,所述x向滑座下侧设有滑块与所述x向滑轨配合。
12.所述x向架体包括x向架体面板,所述x向滑轨设于所述x向架体面板中部,所述x向架体面板一侧设有所述x向限位滑槽、另一侧与架体底板间形成x向安装开口,所述x向滑座一侧通过第三连板伸入所述x向限位滑槽中与所述x向丝母固连,另一侧通过第四连板伸入所述x向安装开口中与所述x向丝母固连,第三连板上设有导向滑块沿着所述x向限位滑槽移动。
13.所述y向架体上设有连接法兰盘。
14.本发明的优点与积极效果为:
15.1、本发明将骨切割工具直接与六维力传感器相连,能够获得骨切割工具精准的力及力反馈,从而可以辅助系统完成切骨轨迹在线规划,进而设计自适应模型预测控制器实现切骨轨迹跟踪,最终实现高效、安全的机器人自动切骨手术。
16.2、本发明通过伺服电机 丝杠丝母组件结构保证直线输出,并利用y向架体和x向架体上的限位滑槽限定对应滑座位移和方向,利用移动传感器实时监测对应滑座位移并及时反馈给系统,从而保证骨切割工具移动精确,进而保证切骨轨迹精确,保证手术顺利进行。
17.3、本发明y向架体和x向架体均为镂空式的轻量化设计,适合切骨手术作业,并且丝杠丝母组件均设于对应架体内部,整体结构紧凑。
附图说明
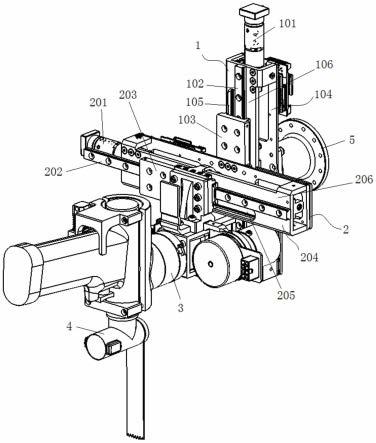
18.图1为本发明的结构示意图,
19.图2为本发明的控制原理示意图。
20.其中,1为y向移动机构,101为y向伺服电机,102为y向滑轨,103为y向滑座,104为y向架体,105为y向限位滑槽,106为y向架体面板,2为x向移动机构,201为x向伺服电机,202为x向滑轨,203为x向滑座,204为x向架体,205为x向限位滑槽,206为x向架体面板,3为六维力传感器,4为骨切割工具,5为连接法兰盘。
具体实施方式
21.下面结合附图对本发明作进一步详述。
22.如图1~2所示,本发明包括y向移动机构1、x向移动机构2、六维力传感器3和骨切割工具4,所述y向移动机构1设有y向驱动组件、y向架体104和y向滑座103,所述y向驱动组件和y向滑座103均设于所述y向架体104上,且所述y向滑座103与所述y向架体104滑动连接并通过所述y向驱动组件驱动移动,所述x向移动机构2包括x向驱动组件、x向架体204和x向滑座203,所述x向架体204与所述y向滑座103固连,x向驱动组件和x向滑座203均设于所述x向架体204上,且所述x向滑座203与所述x向架体204滑动连接并通过所述x向驱动组件驱动移动,所述骨切割工具4安装于所述x向滑座203上,且所述骨切割工具4与所述x向滑座203之间设有六维力传感器3。所述骨切割工具4和六维力传感器3均为本领域公知技术且为市购产品。
23.如图1所示,本实施例中,所述y向驱动组件包括y向伺服电机101、y向减速器、y向丝杠和y向丝母,所述y向伺服电机101与y向减速器固连,所述y向减速器输出轴通过联轴器与所述y向丝杠连接,所述y向丝母套装于所述y向丝杠上,所述y向滑座103与所述y向丝母固连。装置工作时,所述y向伺服电机101驱动y向丝杠转动,进而驱动y向丝母带动所述y向滑座103移动。
24.如图1所示,本实施例中,所述y向架体104上设有y向滑轨102,所述y向滑座103下侧设有滑块与所述y向滑轨102配合。
25.如图1所示,所述y向架体104上设有y向限位滑槽105限定所述y向滑座103的位移和方向,并且在所述y向架体104内设有y向移动传感器实时监测所述y向滑座103的位移情况并反馈给控制系统,所述y向移动传感器为本领域公知技术且为市购产品。
26.如图1所示,所述y向架体104包括y向架体面板106,所述y向滑轨102设于所述y向架体面板106中部,所述y向架体面板106一侧设有所述y向限位滑槽105,所述y向架体面板106另一侧与y向架体104底板间形成y向安装开口,所述y向滑座103一侧通过第一连板伸入所述y向限位滑槽105中与所述y向丝母固连,另一侧通过第二连板伸入所述y向安装开口中与所述y向丝母固连,第一连板上设有导向滑块沿着所述y向限位滑槽105移动起到限位导向作用。
27.如图1所示,本实施例中,所述x向驱动组件包括x向伺服电机201、x向减速器、x向丝杠和x向丝母,所述x向伺服电机201与x向减速器固连,所述x向减速器输出轴通过联轴器与所述x向丝杠连接,所述x向丝母套装于所述x向丝杠上,所述x向滑座203与所述x向丝母固连。装置工作时,所述x向伺服电机201驱动x向丝杠转动,进而驱动x向丝母带动所述x向滑座203移动。
28.如图1所示,本实施例中,所述x向架体204上设有x向滑轨202,所述x向滑座203下侧设有滑块与所述x向滑轨202配合。
29.如图1所示,所述x向架体204上设有x向限位滑槽205限定所述x向滑座203的位移,并且在所述x向架体204内设有x向移动传感器实时监测所述x向滑座203的位移情况并反馈给控制系统,所述x向移动传感器为本领域公知技术且为市购产品。
30.如图1所示,所述x向架体204包括x向架体面板206,所述x向滑轨202设于所述x向架体面板206中部,所述x向架体面板206一侧设有所述x向限位滑槽205,所述x向架体面板
206另一侧与x向架体204底板间形成x向安装开口,所述x向滑座203一侧通过第三连板伸入所述x向限位滑槽205中与所述x向丝母固连,另一侧通过第四连板伸入所述x向安装开口中与所述x向丝母固连,第三连板上设有导向滑块沿着所述x向限位滑槽205移动起到限位导向作用。
31.如图1所示,所述y向架体104上设有连接法兰盘5用于与切骨机器人连接。
32.本发明的工作原理为:
33.本发明通过y向移动机构1和x向移动机构2构成直线输出驱动骨切割工具4移动,除了可以精确控制骨切割工具4的y向和x向位移外,还可以通过x向滑座203与骨切割工具4之间的六维力传感器3获得精准的力及力反馈,如图2所示,本发明的一个实施例工作时通过所述六维力传感器3对骨切割工具4的有效力进行辨识,然后系统通过卡尔曼滤波数据融合建立多元耦合动力学模型,在得到多元耦合模型后,采用加权动态系统完成切骨轨迹在线规划,并利用扩张观测器获得力矩引导信息,进而设计自适应模型预测控制器实现切骨轨迹跟踪,最终实现高效、安全的机器人自动切骨手术。另外由于本发明将骨切割工具4直接和六维力传感器3连接,为了保证骨切割工具4的移动精度和连接刚度,本发明在y向架体104上设有y向限位滑槽105限定所述y向滑座103的位移和方向,x向架体204上设有x向限位滑槽205限定所述x向滑座203的位移和方向,并且所述y向架体104和x向架体204内均设有移动传感器实时监测对应滑座位移情况,并及时反馈给控制系统进行路径控制和调整,进而充分切骨轨迹精确,保证手术顺利进行。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。