可操作为清洁环境的地面的移动清洁机器人
1.优先权的声明
2.该专利申请要求2020年10月7日提交的题为“two in one mobilecleaning robot”的美国专利申请序列号63/088,544的在35u.s.c.第119(e)节下的优先权的权益,该专利申请通过引用整体结合于此。
技术领域
3.本实用新型涉及一种可操作为清洁环境的地面的移动清洁机器人。
背景技术:
4.自主移动机器人包括自主移动清洁机器人,其能够在诸如家的环境内自主执行清洁任务。许多类型的清洁机器人在某种程度上以不同的方式具有自主性。有些机器人可以执行吸尘操作,有些可以执行拖地操作。其他拖地机器人可以包括用于执行吸尘和拖地操作的部件或系统。
技术实现要素:
5.一些自主清洁机器人可以包括真空系统和拖地或清洁系统,其可以允许机器人执行拖地和吸尘操作(例如同时或替代地),通常被称为二合一机器人或真空吸尘器。一些二合一机器人包括位于真空吸取器后方的垫型拖地系统,其允许机器人在用垫拖擦所述地面之前从地面吸取碎屑。这些系统可以有效地清洁可能需要碎屑吸取和拖地的坚硬表面。然而,这种二合一系统可能难以清洁纤维表面,例如地毯,其中不需要拖地,并且拖地垫和地面之间的间隙可能阻止机器人行进到纤维表面上,例如高绒地毯。在地毯上使用拖地系统也会导致地毯不必要的污染。此外,一些拖地系统需要用户在功能之间手动调节一个或多个拖地特征。
6.本公开通过提供一种移动清洁机器人来有助于解决这些问题,该移动清洁机器人包括具有垫驱动系统的拖地或清洁系统,其中垫驱动系统可操作为在清洁位置和存储位置之间移动拖地垫组件。也就是说,当机器人在硬表面(例如木头或瓷砖)上时,垫驱动系统可以将垫移动到清洁位置,并且在机器人移动到铺有地毯的表面之前,垫驱动系统可以将垫移动到存储位置。这种垫驱动系统有助于允许机器人在同一任务期间用真空吸尘器清洁地毯表面以及用真空吸尘器清洁和拖把清洁硬地面,而不需要用户干预。垫驱动系统的示例将在下面进一步详细讨论。
7.以上讨论旨在提供本专利申请主题的概述。它不旨在提供对本实用新型的排他性或详尽的解释。包括以下描述以提供关于本专利申请的进一步信息。
附图说明
8.在不一定按比例绘制的附图中,相似的附图标记可以描述相似的部件。具有不同字母后缀的相同附图标记可以代表相似部件的不同实例。附图通过示例而非限制的方式大
体示出了本文件中讨论的各种实施例。
9.图1示出了环境中的移动清洁机器人的平面图。
10.图2a示出了移动清洁机器人的仰视图。
11.图2b示出了移动清洁机器人的一部分的穿过图2a的指示器2b-2b的侧截面图。
12.图3a示出了移动清洁机器人的仰视图。
13.图3b示出了移动清洁机器人的一部分的侧截面图。
14.图4示出了移动清洁机器人的一部分的侧截面图。
15.图5示出了移动清洁机器人的一部分的侧截面图。
16.图6示出了移动清洁机器人的仰视图。
17.图7a示出了移动清洁机器人的俯视图。
18.图7b示出了移动清洁机器人的俯视图。
19.图8a示出了移动清洁机器人的仰视图。
20.图8b示出了移动清洁机器人的一部分的顶部等距视图。
21.图9示出了移动清洁机器人的一部分的穿过图8a的指示器9-9的侧截面图。
22.图10示出了移动清洁机器人的一部分的等距视图。
23.图11示出了移动清洁机器人的一部分的等距视图。
24.图12示出了移动清洁机器人的一部分的等距视图。
25.图13示出了移动清洁机器人的一部分的侧视图。
26.图14示出了移动清洁机器人的滑轮的等距视图。
27.图15a示出了移动清洁机器人的一部分的侧视图。
28.图15b示出了移动清洁机器人的一部分的侧视图。
29.图15c示出了移动清洁机器人的一部分的侧视图。
30.图15d示出了移动清洁机器人的一部分的侧视图。
31.图16a示出了移动清洁机器人的垫组件的等距俯视图。
32.图16b示出了移动清洁机器人的垫组件的等距仰视图。
33.图17a示出了移动清洁机器人的一部分的侧截面图。
34.图17b示出了移动清洁机器人的一部分的侧截面图。
35.图18示出了移动清洁机器人的仰视图。
36.图19示出了移动清洁机器人的垫组件的俯视图。
37.图20示出了移动清洁机器人的侧视图。
38.图21a示出了移动清洁机器人的透视图。
39.图21b示出了移动清洁机器人的透视图。
40.图21c示出了移动清洁机器人的透视图。
41.图22图示了移动清洁机器人的一部分的等距视图。
42.图23a图示了移动清洁机器人的一部分的等距视图。
43.图23b示出了移动清洁机器人的一部分的等距视图。
44.图24a示出了移动清洁机器人的一部分的侧视图。
45.图24b示出了移动清洁机器人的一部分的等距视图。
46.图25a图示了移动清洁机器人的一部分的等距视图。
47.图25b示出了移动清洁机器人的一部分的正视图。
48.图26示出了移动清洁机器人的一部分的等距视图。
49.图27示出了移动清洁机器人的一部分的等距视图。
50.图28a图示了移动清洁机器人的一部分的等距视图。
51.图28b示出了移动清洁机器人的一部分的等距视图。
52.图29a图示了移动清洁机器人的一部分的等距视图。
53.图29b示出了移动清洁机器人的一部分的等距视图。
54.图29c图示了移动清洁机器人的一部分的等距视图。
55.图30示出了移动清洁机器人的一部分的侧视图。
56.图31a图示了移动清洁机器人的一部分的等距视图。
57.图31b示出了移动清洁机器人的一部分的等距视图。
58.图32示出了移动清洁机器人的一部分的等距视图。
59.图33示出了移动清洁机器人的一部分的等距视图。
60.图34示出了移动清洁机器人的一部分的俯视图。
61.图35示出了移动清洁机器人的一部分的等距视图。
62.图36a图示了移动清洁机器人的一部分的等距视图。
63.图36b示出了移动清洁机器人的一部分的等距视图。
具体实施方式
64.图1示出了根据本公开的至少一个示例的环境40中的移动清洁机器人 100的平面图。环境40可以是住宅,例如家或公寓,并且可以包括房间42a
‑ꢀ
42e。障碍物,例如床44、桌子46和岛48,可以位于环境的房间42中。每个房间42a-42e可以分别具有地面50a-50e。一些房间,例如房间42d,可以包括地毯,例如地毯52。地面50可以是一种或多种类型的,例如硬木、陶瓷、低绒头地毯、中绒头地毯、长(或高)-绒头地毯、石头等。
65.移动清洁机器人100可以例如由用户60操作,以逐个房间的方式自主清洁环境40。在一些示例中,机器人100可以在移动到下一个房间(例如房间42d)以清洁房间42d的表面之前清洁一个房间(例如房间42a)的地面 50a。不同的房间可以有不同类型的地面。例如,房间42e(可以是厨房)可以有硬地面,例如木头或瓷砖,而房间42a(可以是卧室)可以有地毯表面,例如中绒头地毯。其他房间,例如房间42d(可以是餐厅),可以包括多个表面,其中地毯52位于房间42d内。
66.在清洁或行走操作期间,机器人100可以使用从各种传感器(例如光学传感器)和计算(例如里程计和障碍物检测)收集的数据来开发环境地图。一旦创建了地图,用户60可以在地图内定义房间或区域(例如房间42)。该地图可以在诸如移动设备之类的用户界面上呈现给用户60,用户60可以例如指示或改变清洁偏好。
67.此外,在操作期间,机器人100可以检测每个房间42内的表面类型,这些表面类型可以存储在机器人或其他设备中。机器人100可以更新地图 (或与其相关的数据),以便包括或说明环境的各个房间42中的每一个的地面50a-50e的表面类型。在一些示例中,可以更新地图以示出不同的表面类型,例如在每个房间42内。
68.在一些示例中,用户60可以使用例如本文描述的方法和系统来定义行为控制区域
54。响应于用户60定义行为控制区域54,机器人100可以向行为控制区域54移动以确认选择。确认后,可以启动机器人100的自主操作。在自主操作中,机器人100可以响应于在行为控制区域54内或附近而启动一行为。例如,用户60可以将环境40的易于变脏的区域定义为行为控制区域54。作为响应,机器人100可以启动集中清洁行为,其中机器人100执行在行为控制区域54中的地面50d的一部分的集中清洁。
69.机器人示例
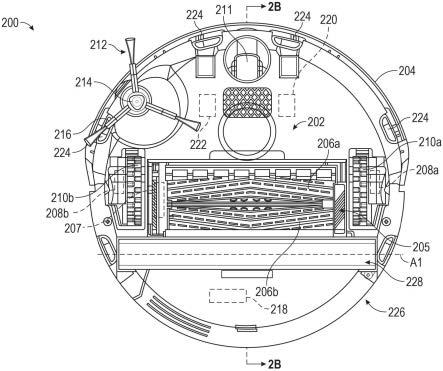
70.图2a示出了移动清洁机器人200的仰视图,其可以包括主体202、缓冲器204、吸取器(extractor)205(包括辊206a和206b)、马达208a和208b、驱动轮210a和210b、脚轮211、侧刷组件212、马达214、刷216、真空组件218、控制器220、存储器222、传感器224、碎屑箱226、拖地系统228 (或清洁系统228)、水罐233和泵235。
71.清洁机器人200可以是自主清洁机器人,其自主地穿越地面50同时从地面50的不同部分吸入碎屑75。如图2a所示,机器人200可以包括主体 202,主体202能够在地面50上移动。主体202可包括多个连接结构,清洁机器人200的可动部件安装到所述多个连接结构上。连接结构可以包括例如覆盖清洁机器人200的内部部件的外壳体、安装驱动轮210a和210b以及 (清洁组件205的)清洁辊206a和206b的机架、安装到外壳体的缓冲器 204等。脚轮211可以将主体202的前部202a支撑在地面50上方,并且驱动轮210a和210b将主体202的后部202b支撑在地面上方50。
72.如图2a所示,主体202包括具有可连接到缓冲器204的大致半圆形形状的前部和具有大致半圆形形状的后部。在其他示例中,主体202可以具有其他形状,例如方形前部或直前部。机器人200还可以包括驱动系统,该驱动系统包括致动器208a和208b,例如马达。致动器208a和208b可以安装在主体202中并且可以可操作地连接到驱动轮210a和210b,驱动轮210a和 210b可旋转地安装到主体202。驱动轮210a和210b可以将主体202支撑在地面50上方。致动器208a和208b在被驱动时可以旋转驱动轮210a和210b 以使得机器人100能够自主地在地面50上移动。
73.真空组件218可以被承载在机器人200的主体202内,例如,在主体 202的后部,并且在其他示例中可以位于其他位置。真空组件218可包括用于驱动叶轮的马达,该叶轮在旋转时产生气流。气流和清洁辊206(在旋转时)可以协作以将碎屑75吸入机器人200中。清洁箱226可以安装在主体 202中并且可以容纳被机器人200吸入的碎屑75。主体202可以在气流进入真空组件218并从主体202排出之前将碎屑75从气流中分离。在这点上,在气流从主体202排出之前,碎屑75可以被捕获在清洁箱226和过滤器中。在一些示例中,真空组件218和吸取器205可以可选地被包括或者可以是不同类型的。
74.清洁辊206a和206b可以通过齿轮箱可操作地连接到致动器207,例如马达。清洁头205以及清洁辊206a和206b可以定位在清洁箱226的前方。清洁辊206可以安装到主体202的下侧,使得在清洁操作期间,当下侧朝向地面50时,清洁辊206a和206b接合地面50上的碎屑75。
75.控制器220可以位于壳体内并且可以是可编程控制器,例如单板或多板计算机、直接数字控制器(ddc)、可编程逻辑控制器(plc)等。在其他示例中,控制器220可以是任何计算设备,例如手持计算机,例如智能手机、平板电脑、膝上型计算机、台式计算机,或任何其他计算设备,包括处理器、存储器和通信能力。存储器222可以是一种或多种类型的存储器,
例如易失性或非易失性存储器、只读存储器(rom)、随机存取存储器(ram)、磁盘存储介质、光存储介质、闪存设备,以及其他存储设备和媒体。存储器222可以位于壳体202内,连接到控制器220并且可由控制器220访问。
76.在清洁操作期间,控制器220可以操作致动器208a和208b以围绕地面 50自主导航机器人200。致动器208a和208b可操作为在向前驱动方向上、在向后方向上驱动机器人200并转动机器人200。控制器220可操作真空组件218以生成气流,该气流流过在清洁辊206附近的气隙,穿过主体202,并从主体202出来。
77.控制系统还可包括具有一个或多个电传感器的传感器系统。如本文所述,传感器系统可以生成指示机器人200的当前位置的信号,并且可以在机器人 200沿着地面50行进时生成指示机器人200的位置的信号。
78.落差传感器224(图2a中所示)可以沿着壳体202的底部定位。每个落差传感器224可以是光学传感器,其可以被构造为检测光学传感器(例如地面50)下方的物体的存在或不存在。落差传感器224可以连接到控制器220并且可以由控制器220使用,以在环境40内导航机器人200。在一些示例中,可以使用落差传感器以检测地面类型,控制器220可以使用该地面类型来选择性地操作拖地系统228。
79.清洁垫组件228可以是一清洁垫,其在吸取器205后部的位置连接到主体202的底部(或连接到移动机构,该移动机构被构造为在存储位置和清洁位置之间移动该组件228),例如连接到清洁箱226。清洁垫组件228在下面进一步详细讨论。
80.罐233可以是水罐,该水罐被构造为存储水或流体,例如清洁液,用于输送到拖地垫230。泵235可以连接到控制器220并且可以与水罐233流体连通。控制器220可以被构造为在拖地操作期间操作泵235以将流体输送到拖地垫230。
81.图2b示出了横过图2a的指示符2b-2b以显示移动清洁机器人200的一部分的侧截面图,其可与上述图2a一致;图2b示出了机器人200的额外细节。例如,图2b示出了拖地系统228可以包括清洁垫230和位于机器人200的壳体202的垫壳体234中的芯部232。
82.垫壳体234的形状可以与清洁垫230互补,使得垫壳体234可以是圆形或半圆形(或圆的等)。如下所述,当垫处于存储位置时,垫壳体234可以在其中接收垫230。垫壳体234也可成形为使得垫230可在垫壳体234下方延伸以在垫230处于清洁位置时接合地面50。垫壳体234可以包括悬架以有助于提供清洁垫230相对于机器人200的主体202和地面50的顺应性,这可以有助于清洁垫230适应地面50相对于机器人200的高度和平坦度的变化。
83.芯部232可以是由诸如金属、塑料、泡沫、弹性体、陶瓷、复合材料、它们的组合等中的一种或多种的材料制成的刚性或半刚性主体。芯部232可以是细长的,沿着纵向轴线a1延伸跨过主体202的宽度并且可以连接到机器人200的主体202。芯部232可以具有包括帽236的半圆形横截面形状,该帽形成辊的干燥侧并有助于形成d形辊。帽236可以是大体上平坦部分,其直径小于垫壳体234的直径,以允许垫230和芯部232在壳体234内自由旋转。当垫230在使用中,帽236可以被取向为远离地面,如图2b所示。
84.垫230可以是横跨轴线a1延伸的细长构件并且可以是半刚性和多孔材料,例如布、泡沫、聚合物等中的一种或多种,使得垫230可以被构造为保存流体和细小灰尘或碎屑。垫230可以连接到芯部232,使得垫230连接到芯部232的径向外部的至少一部分。在一些示例中,垫230可以围绕芯部 232的周向在150度和250度之间延伸。在一些示例中,垫230可以围
绕芯部232的周向在150度和180度之间延伸。
85.当垫230处于清洁位置并与地面50接合时,垫230可以是可弹性变形或顺应的,使得垫230可以贴合地面50,如图2b所示。垫230的一部分可以在拖地操作期间保持与地面50接合,并且在一些操作期间可以旋转垫230 以部分地接合表面50,如下文进一步详细讨论的。
86.在一些示例中,垫230可以是干垫,例如用于除尘或干碎屑去除。垫230 也可以是任何布、织物或类似物,其被构造为用于清洁(湿的或干的)地面。
87.图3a示出了移动清洁机器人200的仰视图。图3b示出了移动清洁机器人200的一部分的侧截面图。图3a和3b的机器人200可以与图2a-2b 的机器人200一致;图3a-3b示出了处于存储位置的清洁垫组件228并且还示出了垫马达238或垫驱动系统238。
88.垫马达238可以是连接到拖地垫组件228的致动器、马达等,例如连接到芯部232或与其连接的轴。垫马达238可以连接到主体202并且可以与控制器220通信以操作马达238,以让清洁垫组件228在清洁位置和存储位置之间运动。
89.如图3a和3b所示,当机器人200不预期执行拖地操作时(例如当计划清洁铺有地毯的地面时),控制器220可以操作马达238以使清洁垫组件从图2a和2b所示的清洁位置运动到图3a和3b所示的存储位置。在存储位置,帽236可以朝向(例如平行于)地面50取向并且可以被构造为与主体202的底部表面齐平或不延伸超过该底部表面。
90.此外(如图3b所示),在存储位置,垫230可位于垫壳体234内,使得垫 230不暴露于环境,这可有助于在不涉及拖地的吸尘操作期间保持垫230湿润并且可以有助于在地毯表面的吸尘操作期间防止垫230接触地毯。当机器人200返回硬地面(例如地面250)时,控制器220可操作马达238以转动芯部232和垫230,使垫230移出垫壳体234并接合地面50。当机器人200返回到硬地面时,控制器220可以操作马达238,以将垫230返回到其存储前的先前取向或到新的取向,以将地面50与垫的新鲜部分接合。
91.图4示出了移动清洁机器人200的一部分的侧截面图,其中图4示出了清洁垫组件228处于相对于机器人200的主体202和相对于地面50部分旋转的位置,使得仅垫230的一部分240接合地板50。
92.在机器人200的拖地操作期间,控制器220可以控制拖地垫组件228以在移动清洁机器人200的整个清洁任务期间相对于地面50旋转经过垫230 和芯部232的旋转范围。在一些示例中,控制器220可以控制马达238,以旋转所述垫230,以部分地接合清洁表面50,如图4所示,使得由角度θ表示的一部分周向与地面50接合。
93.控制器220可以在拖地操作期间监测垫230的位置,例如通过使用连接到马达的传感器(例如编码器、终端开关、电位计、霍尔效应传感器等中的一个或多个)监测芯部232(或与之连接的轴)的旋转位置。控制器220还可以监测垫230在垫230可与地板50接合的旋转范围的每个位置处与地面50接合的时间量。控制器220可以同时或可替换地监测垫230在垫230的每个旋转范围接合的已清洁地面面积的量。控制器220可以使用这样的信息来控制所述垫230的位置。
94.例如,控制器220可以在操作期间缓慢地旋转垫230,以试图均匀地分配垫230的每个部分和地板50之间的接触时间。为了这样做,控制器220 可以旋转垫230以改变与地面50接合的角度θ,或者可以改变垫230与地面50接合的部分。控制器220可以随着时间间隔递增
地旋转垫230。例如,每60秒,控制器220可以将垫旋转1、2、3、4、5、6、7、8、9、10度等。此外,控制器220可以在操作期间连续旋转垫230,其中可以选择旋转速率,例如每秒1度或每分钟1度等。
95.在一些示例中,控制器220可以在拖地操作期间操作垫230来擦洗地面 50。可以通过让辊位置的摆动(角度θ)以相对较高的速度(频率)震荡来产生垫 230的擦洗动作。在机器人已经检测到地面50的污渍或更难清洁的区域之后,通过额外致动器在一段临时时间内振动整个辊壳体,也可以产生垫230 的擦洗动作。
96.图5示出了移动清洁机器人200的一部分的侧视截面图。图5的移动清洁机器人200可以与上面讨论的图2a-4一致,图5示出壳体234可以包括突起242,该突起242可以被构造成当垫230旋转到壳体234中时接合垫 230。当垫230旋转到壳体234中并接合突起242时,突起242或刮刀可以挤压所述垫230,挤压所述垫230并导致流体或水移出垫230。突起242还可以有助于从垫230上去除细小的灰尘或碎屑,以有助于在与地面50接合期间保持垫230清洁。
97.流体和碎屑可以通过通道246收集到箱或流体室233中(其可以可选地是碎屑箱226的一部分)。在一些示例中,流体可以在与突起242接合之后被重新引入垫,以有助于用新的或干净的流体补充或更新垫230。
98.图6示出了移动清洁机器人200的仰视图。图6的移动清洁机器人200 可以与上面讨论的图2a-4一致,图6示出壳体234可以包括致动器248,该致动器可以连接到主体202和垫组件228,例如连接到芯部232或其轴。
99.致动器248可以与控制器220通信,其中控制器220可以向致动器248 传送指令以横向向外平移垫组件,用于边缘清洁。例如,当控制器220检测到边缘表面80时,控制器220可以操作致动器248向外平移垫组件228,以定位在边缘表面80附近,从而有助于机器人200清洁该边缘表面80或清洁该边缘表面80附近的地面50。当控制器220确定边缘表面不再存在时,控制器220可以操作致动器248,以将垫组件228重新定位在机器人主体202 的中心。
100.图7a示出了移动清洁机器人700的俯视图。图7b示出了移动清洁机器人的俯视图。下面一起讨论图7a和7b。
101.移动清洁机器人700可以类似于上面讨论的移动清洁机器人200,机器人700可以包括主体702、驱动轮、控制器等。移动机器人700可包括连接到垫组件752(包括拖地垫754)的垫驱动系统750,其中驱动垫系统750可操作以让垫组件从如图7a、图7a所示的机器人700的顶部703处的存储位置运动到机器人700的主体702下方的清洁位置,在该清洁位置,垫754可接合地面以对地面进行拖地。机器人700可以可选地包括真空组件。机器人700 的额外细节将在下面讨论。
102.图8a示出了移除了清洁垫的移动清洁机器人700的仰视图。图8b示出了移动清洁机器人700的一部分的顶视等距视图。图8a和8b示出了机器人700的额外细节。
103.例如,图8a和8b示出了垫驱动系统750如何能够连接到碎屑箱726,并且能够从如图8b所示的主体702的顶部703延伸到如图8a所示的主体 702的底部707。图8a还示出了垫驱动系统750可以包括马达756、轴758、驱动履带760a和760b(统称为驱动履带760或履带760或带760)以及履带连接件762(或垫连接件762)。
104.马达756可以是连接到轴758的电动马达,并且可操作为驱动轴758围绕轴758的轴
线旋转。马达756可以是由电源供电的定速马达或变速马达。马达756可以与控制器(例如控制器220)通信。轴758可以连接到驱动履带 760(例如通过一个或多个滑轮或齿轮),使得马达756可以被操作为旋转所述履带760。
105.驱动履带760可以连接到主体702(例如经由滑轮和支撑件),驱动履带 760a和760b可以经由履带连接件762连接到拖地垫组件752,其中履带连接件762固定到驱动履带760。驱动履带760可以从主体702的底部707围绕主体702的外边缘764(例如碎屑箱726)并沿着主体702的顶部703的一部分延伸。
106.在一些示例的操作中,马达756可以由控制器220操作,以旋转所述轴 758来驱动所述驱动履带760,以让垫连接件762在清洁位置(在机器人主体 702的下侧)和存储位置(在机器人主体702的上方或顶部)之间,从而让垫组件752运动。
107.图9示出了经过图8a的指示符9-9的、移动清洁机器人700的一部分的侧截面图。图9示出了碎屑箱726可以包括水罐766和干燥箱768。干燥箱768可以经由穿过主体702的碎屑路径770连接到吸取器705(包括辊 706—图9中仅示出一个),其中干燥箱768可以被构造为在真空操作期间接收和存储从吸取器705吸取的碎屑。
108.水罐766可以被构造为存储清洁液或水,用于在拖地操作期间或在拖地操作之间的垫组件752存储期间补充清洁垫754。清洁垫754可以是半刚性和多孔材料,例如布、泡沫、聚合物等中的一种或多种,使得该垫754被构造成保存流体和细小碎屑或灰尘。在一些示例中,垫754可以是干垫,例如用于除尘或干碎屑去除。垫754也可以是被构造用于清洁(湿的或干的)地面的任何布、织物等。水罐766可以通过壁772与干燥箱768分开,以有助于防止干燥箱768及其内容物在拖地操作期间变湿,并有助于防止水罐766中的流体变脏。
109.图9还示出了垫组件752可以包括垫托盘774,其连接到垫754并经由垫托盘774的柱776连接到垫连接件762。垫托盘774可以是刚性或半刚性构件,其被构造成支撑清洁垫754并将清洁垫754连接到驱动履带760。
110.图10示出了移动清洁机器人700的一部分的等距视图。图11示出了移动清洁机器人700的一部分的等距视图。图10和11显示了箱726和垫驱动系统750的额外细节。例如,垫驱动系统750可以包括框架778、滑轮780 和782、销784和786、驱动齿轮788a、从动齿轮788b和从动轴790。
111.图11示出了驱动条带760a和760b可以分别连接到驱动框架778a和 778b,图10示出了框架778可以是连接到箱726的刚性构件,其可以将带 760连接到箱726和机器人700的主体702。
112.驱动齿轮788a和从动齿轮788b可以是正齿轮、斜齿轮、锥齿轮等。图 11还示出了驱动轴758(其可以连接到马达756
‑‑
如图8a所示)可以连接到驱动齿轮788a,并且驱动齿轮788a可以连接到从动齿轮788b。从动齿轮788b 可以连接到从动轴790,从动轴790可以连接到分别固定到框架778a和778b 的驱动滑轮792a和792b。当箱726被移除时,驱动齿轮788a可以与从动齿轮788b分离(例如通过齿轮的齿脱离),以有助于允许垫驱动系统750和箱 726从机器人的主体702移除,用于维护或清洁。
113.驱动滑轮792a和792b可以分别与驱动履带760a和760b接合。驱动履带760a和760b也可以分别由惰轮支撑在框架778和778b上。例如,驱动履带760b可以通过滑轮780和782连接到框架778b,其中滑轮780和782 可以分别通过销784和786连接到框架778b。框架778a可
以类似地构造;框架778a和778b可以包括额外的滑轮,以分别引导驱动履带760a和760b 围绕框架778a和778b旋转。
114.在操作中,驱动轴758可以由马达756驱动,以绕其轴线旋转,这可以驱动驱动齿轮788a与其一起旋转。与从动齿轮788b啮合的驱动齿轮788a 可以使从动齿轮788b旋转,以驱动从动轴790。从动轴790可以驱动所述驱动滑轮792a和792b旋转,以围绕框架778a和778b驱动该驱动履带760a 和769b,从而在清洁位置和存储位置之间移动垫连接件762(因此移动垫组件752)。
115.图12示出了移动清洁机器人700的一部分的等距视图。图13示出了移动清洁机器人700的一部分的侧视图。下面一起讨论图12和13。
116.图12示出了垫连接件762可以包括板794,板794包括孔796a和796b,其中孔796可以被构造成接收垫穿过其的托盘774的柱776,以将垫托盘774 固定到垫连接件762的板794。图12和13还示出了垫连接件762可以包括从垫板794向外延伸的指状件798a和798b,指状件798a和798b可以被构造成将垫板794连接到驱动履带760b。类似地,垫连接件762可以包括从垫板794向外延伸的指状件799a和799b,以将垫板794连接到驱动履带760a。指状件798和799可以通过摩擦接合部、紧固件等连接到履带760。此外,指状件798和799可以包括突起,以与履带760的肋或凹口接合,并有助于限制履带760相对于垫连接件762的相对运动。
117.图14示出了移动清洁机器人的滑轮1400的等距视图。滑轮1400可以是上述垫驱动系统750的任何滑轮。滑轮1400可以包括延伸穿过滑轮1400 的主体1401的孔1408。孔1408可以容纳销或轴(例如图12的销784a),以将销或轴固定到滑轮1400。
118.滑轮1400还可以包括由凹部1404分开的长齿1403和由凹部1406分开的短齿1405。滑轮还可以包括凹口1406a-1406n,凹口1406a-1406n可以被成形为接收垫连接件762的指状件798或799,以允许垫连接件762在履带 760围绕框架778移动时移动经过滑轮1400,这可以有助于在清洁位置和存储位置之间移动垫组件752。
119.短齿1405和凹部1404可以与凹口1406周向对准,长齿1403和凹部 1402可以周向位于凹口1406之间,这有助于当指状件(例如798a)经过滑轮 1400并进入凹口(例如1406a)时,允许齿1403和1405以及凹口1402和1404 可以保持与履带760接触。
120.图15a示出了移动清洁机器人700的一部分的侧视图。图15b示出了移动清洁机器人700的一部分的侧视图。图15c示出了移动清洁机器人700 的一部分的侧视图。图15d示出了移动清洁机器人700的一部分的侧视图。下面一起讨论图15a-15d。
121.图15a示出了当垫组件752处于清洁位置时,垫组件752可以位于机器人主体702下方,使得垫754可以朝向清洁表面取向并位于清洁表面附近。然后,当机器人700(例如控制器220)确定拖地组件752需要移动到存储位置(例如用于停驻或用于清洁铺有地毯的表面)时,控制器720可以控制马达756驱动所述驱动轴758,以驱动所述履带760(如上所述),从而横向移动垫连接件762和垫组件752,如图15b所示。
122.编码器、霍尔效应传感器或一个或多个限位开关可与控制器(例如控制器220)通信,并可用于检测履带760的位置。控制器可以选择或停止拖地组件752的位置,用于维护,例如由用户移除垫或在停驻处自动清洁垫。控制器还可以选择拖地垫组件752的位置,以向外定位,用于边缘清洁或其他功能。
123.马达756可以让履带760继续运动,以使垫组件752围绕驱动组件750 的滑轮并进入竖直位置,如图15c所示。马达756可以进一步将垫组件752 从图15c的竖直位置移动到水平位置,如图15d所示,其中垫组件可以基本平行于主体702的顶部表面703,并且其中垫组件752处于存储位置。在这种位置,垫754可以向上取向,这可以允许当垫处于存储位置时,例如当机器人700在完成拖地任务后而停驻时,使垫变干。
124.图16a示出了移动清洁机器人700的垫组件752的等距俯视图。图16b 示出了移动清洁机器人700的垫组件752的等距仰视图。图16a和16b将在下面一起讨论。
125.图16a示出了垫托盘774可以包括凸台(或柱)776a和776b,它们可以从垫托盘774的表面向上延伸。每个柱776可以包括突起1602,突起1602 可以是卡扣配合特征,其中突起1602可以在垫连接件762附接到板794期间通过与垫连接件762的板794的孔796接合而向内偏转。一旦柱776完全插入孔796中,突起1602可以向外偏转。突起1602(连同柱776,例如,柱 776a)可以在突起1602处产生大于孔796的柱直径,以有助于限制柱776穿过板794返回并从垫连接件762脱开。
126.图16b示出了拖地垫754在托盘774的与柱776相反的一侧连接到托盘774,使得当拖地垫754朝向地面取向时,柱776可以取向为远离垫754 和地面。
127.图17a示出了移动清洁机器人700的一部分的侧截面图。图17b示出了移动清洁机器人700的一部分的侧截面图。
128.图17a和17b示出了定位在机器人700的主体702下方的垫组件752,使得垫754位于地面附近或接触地面。图17b示出了图17a的聚焦视图,其中图17b更清楚地示出了远离清洁垫754延伸的垫托盘774的柱776。柱 776可以延伸穿过垫附件762的板794。突起1602可以从柱776径向向外延伸。
129.图17b还示出了当垫组件752处于清洁位置时垫组件752的竖直行程范围。垫托盘774和垫754通常可以通过托盘774和清洁垫754的重量(并且可选地通过偏压元件)而被朝向地面偏压,但是可以相对于主体702和垫连接件762自由向上移动,例如当垫754遇到凸起(例如门槛或地板过渡部) 时。在这种情况下,垫组件752可以在柱776和板794的孔的引导下向上移动,直到柱776接合通道1702,该通道1702可以与柱776的顶部1704相距距离d1。距离d1可以在1到10毫米之间,这取决于垫组件752向上的期望行程。在一些示例中,距离d1可以是大约4毫米。
130.类似地,突起1602与板794的顶部1706的相距距离d2。突起1602和板794的顶部1706之间的接合可以限定距离d2,该距离可以是操作期间垫组件752向下运动的范围。距离d2可以在1到10毫米之间,这取决于垫组件752向上的期望行程。在一些示例中,距离d2可以是大约4毫米。垫组件752的总运动范围可以是d1加d2,其可以在2到20毫米之间。在一些示例中,垫组件752的总运动范围可以是d1加d2,其可以是大约8毫米。
131.在凸起或垫组件752运动期间,除了平移之外,垫组件752还可以在俯仰和滚动方向上旋转,其中俯仰和滚动可以由柱776和板794的孔引导,直到柱776的一部分接合通道1702,通道1702可以与柱776的顶部1704相距距离d1。因此,柱776和通道1702可以为垫组件752相对于主体702的滚动、俯仰和平移的组合设定限制。
132.通道1702可以延伸穿过箱726的前部1708,以有助于当垫组件在清洁位置(如图17a和17b所示)和存储位置之间移动时,允许柱776与垫组件 752一起移动,同时允许垫组
件752在转向竖直位置(如图15c所示)之前在任何水平位置处移动通过其竖直运动范围。
133.图18示出了移动清洁机器人1800的仰视图。机器人1800可以包括具有底部或表面1803的主体1802。机器人1800还可以包括驱动轮1810和脚轮1811。机器人的主体1802和轮可以类似于上面讨论的机器人200和700。
134.机器人1800还可以包括拖地系统或组件1830(或清洁系统1830),其可以连接到主体1802。拖地组件1830可以包括拖地垫组件1832和包括连杆臂1834a和1834b的连杆1834。连杆1834可以是可弹性变形的半刚性构件,由诸如一种或多种聚合物、金属合金等材料制成。在一些示例中,连杆1834 可以由钢合金制成,例如弹簧钢。在一些示例中,真空组件和吸取器可以可选地包括在机器人1800中。
135.臂1834a和1834b可以连接到垫组件1832,其在拖地垫组件1830处于清洁位置时可以与地面(例如,地面50)接合。臂1834a和1834b也可以连接到主体1802,并分别连接到垫驱动系统1833的驱动履带1836a和1836b。驱动履带1836a和1836b可以连接到主体1802,并且可以分别由垫驱动系统 1833的马达驱动,垫驱动系统1833可以与控制器(例如控制器220)通信。控制器可以操作马达来驱动所述驱动履带1836a和1836b,以在清洁位置和存储位置之间移动拖地组件1830,如下面进一步详细讨论的。
136.图19示出了移动清洁机器人1800的拖地组件1830的俯视图。图19示出了垫组件1832可以包括托盘1838和垫1840,其中垫1840可以可移除地固定到托盘1838。垫1840可以是半刚性和多孔材料,例如布、泡沫、聚合物等中的一种或多种,使得垫1840被构造成保持流体或细小灰尘和碎屑,并将流体施加到地面50。在一些示例中,垫1840可以是干垫,例如用于除尘或干碎屑去除。垫1840也可以是被构造用于清洁(湿的或干的)地面的任何布、织物等。托盘1838可以是刚性或半刚性构件,其被构造为在其上支撑垫1840,并且可以被构造为将力从连杆1834传递到垫1840。
137.图19还示出连杆1834可以包括连接到第一臂1834a和第二臂1834b的连接构件1842。当拖地垫组件1832处于清洁位置时,连接构件1842可以与托盘1838接合,以将向下的力传递到垫组件1830。连接构件1842可以是弯曲构件,该弯曲构件被构造成在各个方向上偏转,并且被构造成允许第一臂 1834a和第二臂1834b与托盘1838的侧面之间的相对运动。此外,臂1834a 和1834b以及连接构件1842可以被构造成响应于向下的力而弯曲,以将向下的力分配到垫组件1830上。在另一种情况下,弹簧,例如扭转弹簧,可以连接到臂1834a和1834b,并且可以被构造为响应于向下的力而提供挠曲。
138.在一些示例中,臂1834a和1834b可以是单独的部件。例如,臂1834a 和1834b可以在连接构件1842处分开,使得臂1834a和1834b具有镜像的几何形状,以控制垫托盘1838的取向,并有助于向地面50提供下压力,同时允许顺应性。
139.臂1834a和1834b还可以包括从臂1834a和1834b向外延伸的外部突起 1844a和1844b,并且可以包括从臂1834a和1834b向内延伸的内部突起 1846a和1846b。突起可用于驱动和引导连杆1834的运动,如下面进一步详细讨论的。
140.托盘1838还可以包括位于托盘1838外部的耳部1848a和1848b。耳部 1848a和1848b可以包括或者可以是将托盘1838分别连接到臂1834a和 1834b的特征。在一些示例中,耳部1848a和1848b可以分别可释放地固定到臂1834a和1834b。
141.图20示出了移动清洁机器人1800的侧视图,其中连杆1834和垫组件 1830处于几
个位置a、b、c、d、e、f、g和h。图20还示出了驱动履带 1836b,其可以包括连接到滑轮1850a和1850b的条带或履带1851,其中一个或多个滑轮可以由马达或致动器驱动,以围绕滑轮1850驱动所述条带 1851。内部突起1846a和1846b可以分别连接到条带1851a和1851b,使得条带1851a和1851b围绕滑轮1850的运动可以引起连杆1834的运动。
142.主体1802还可以包括狭槽1854a和1854b,它们可以分别接收外部突起 1844a和1844b。狭槽1854a和1854b可以沿着主体1802线性延伸,并且可以位于主体1802的相反侧。狭槽1854a和1854b通过它们分别与外部突起 1844a和1844b的接合而可以有助于限定连杆1834的运动范围,从而限定垫组件1832的运动范围,例如通过狭槽1854a和1854b的端部1856a和1856b 之间的接合来实现,并且其中外部突起1844a和1844b的竖直运动可以分别通过与狭槽1854a和1854b的接触而受到限制。
143.图20还示出了连杆1834和垫组件1832如何在至少部分位于主体802 上方的存储位置(位置a)和至少部分位于主体802下方的清洁位置(位置h) 之间移动。在一些示例中,主体1802可以包括存储狭槽1860,该存储狭槽 1860可以与连杆1834或托盘1838接合,以引导拖地垫组件1832进入和离开存储位置(位置a)。在存储位置(位置a),驱动条带1852可以在连杆1834 上施加力,以将连杆1834拉向条带1852,并且连杆1834可以弹性变形(或者可以挠曲)以将垫组件1832拉入狭槽1860中并且平行于顶部表面1803。在位置a,内突起1846a可以位于条带1852的顶部和前部位置,在位置h,内突起1846a可以位于条带1852的底部和前部位置,使得条带1852的运动可以让内突起1846在位置a的顶部和后部位置与位置b的底部和前部位置之间运动,以让垫组件1832在位置a和h之间运动。垫组件1832可以在任何位置暂停(例如通过控制器),例如用于垫移除、垫清洁、边缘清洁或垫干燥。
144.当控制器(例如控制器220)确定应该执行拖地动作时,控制器可以驱动连接到滑轮1850之一,以旋转一个或多个滑轮1850的马达,从而旋转该滑轮,以驱动内部突起1846a,并因此朝向位置b驱动连杆1834和垫组件1832,如由狭槽1854中的外部突起1844引导的,其中外部突起1844可以被引导以水平向后移动。控制器可以继续操作马达来驱动滑轮1850,以使托盘旋转通过位置c、d、e和f,直到垫组件1832接触地面50,在这种情况下,外部突起1844可以被引导为水平向后移动,直到条带1852围绕后滑轮1850 驱动内部突起1846,在这种情况下,内部突起1844可以被引导为再次向前移动,以引导拖地垫组件1832向前移动。
145.一旦垫组件1832接触地面,当条带1852被驱动,以使内部和外部突起 (和连杆)进一步向前运动时,连杆1834会发生偏转,这会导致向下的力施加到连杆1834上。当垫组件从位置f移动到位置g和h时(位置g和h 可以是清洁位置),连杆1834可以偏转或弯曲(弹性地)并且可以在垫组件 1832上施加向下的力。当确定垫组件1832应该移动到存储位置时,控制器可以操作马达以在相反方向上旋转滑轮1850,从而将连杆1834和垫组件 1832从位置h移动回位置a。这样,控制器可以操作驱动系统1833,以在清洁程序或任务期间根据需要在清洁位置h和存储位置a之间移动垫组件 1832。
146.图21a示出了移动清洁机器人的透视图。图21b示出了移动清洁机器人的透视图。图21c示出了移动清洁机器人的透视图。下面一起讨论图21a
‑ꢀ
21c。移动清洁机器人2100可以类似于上面讨论的机器人,并且可以包括任何部件。另外,上面或下面讨论的任何机器人都可以被修改以包括机器人 2100的部件。
147.移动清洁机器人2100可以包括主体2102和拖地系统2104。拖地系统 2104可以包
括臂106a和106b(一起称为臂2106)以及垫组件2108。如上所述,机器人2100还可以包括缓冲器2110和其他特征,例如吸取器(包括辊)、一个或多个侧刷、真空系统、控制器、驱动系统(例如马达、齿轮系和车轮)、脚轮、传感器等。臂2106a和2106b的近端部分可以连接到内部驱动系统。臂106的远端部分可以连接到垫组件2108。
148.机器人100还可以包括控制器2111,控制器2111可以位于壳体或主体 2102内,并且可以是可编程控制器,例如单板或多板计算机、直接数字控制器(ddc)、可编程逻辑控制器(plc)等。在其他示例中,控制器111可以是任何计算设备,例如手持计算机,例如智能电话、平板电脑、膝上型电脑、台式计算机或包括处理器、存储器和通信能力的任何其他计算设备。存储器可以是一种或多种类型的存储器,例如易失性或非易失性存储器、只读存储器 (rom)、随机存取存储器(ram)、磁盘存储介质、光存储介质、闪存设备、和其他存储设备和媒体。存储器可以位于壳体2102内,连接到控制器2111 并且可由控制器2111访问。
149.在一些示例的操作中,控制器2111可以操作臂106以在存储位置(如图 21a所示)、伸出位置(如图21b所示)和操作或清洁位置(如图21c所示)之间移动垫组件2108。在存储位置,机器人2100只能执行吸尘操作。在操作位置,机器人可以执行湿拖地或干拖地操作和吸尘操作,或者只能执行拖地操作。在伸出位置(以及与其类似的位置),机器人100可以更换垫组件的清洁垫,如下面进一步详细讨论的。垫组件也可以移动到伸出位置,用于垫的干燥,例如在充电操作期间。
150.图22示出了移动清洁机器人2100的一部分的等距视图。机器人2100 可以类似于上面讨论的机器人2100(和其他机器人);机器人2100的不同之处在于,垫驱动系统2114可以位于机器人2100的两侧,以引导臂2106和垫组件208的运动。上面或下面讨论的任何机器人都可以被修改以包括这样的驱动系统。
151.垫驱动系统2114可以包括马达2116、横轴2118以及链条驱动系统2120a 和2120b(统称为驱动系统2120)。链条驱动系统2120可以基本相同,但是是镜像的。在其他示例中,驱动系统2120可以不同。驱动链系统2120a可以连接到臂2106a,并且链条驱动系统2120b可以连接到臂2106b。两个链条驱动系统2120都可以连接到横轴2118,并因此连接到马达2116,使得马达 2116可以驱动所述驱动系统2120移动。链条驱动系统2120的操作可导致臂 2106使得垫系统2108在如图21a和22所示的存储位置和如图21c、23a 和23b所示的清洁位置之间运动。
152.每个链条驱动系统2120可以包括引导件2122、链条2124、链轮2126 和盖板2128。引导件2122通常可以是由一种或多种金属、聚合物等制成的刚性或半刚性构件。引导件2122可以包括或者可以限定链条履带2130和臂履带2132。链条履带2130可以至少部分地围绕链条2124的一部分。臂履带 2132可以至少部分地围绕臂2106的一部分。臂2106可以连接到臂履带2132,链条2124可以连接到链条履带2130。
153.链条2124可以是构造成驱动臂2106b的条带、链条等。链2124可以由金属、聚合物等中的一种或多种制成。在一些示例中,链2124可以是注射成型的聚合物链条。替代地,链条2124可以是链节链条(例如,自行车型)或珠棒链条(bead and bar chain)。链条2124可以连接到臂2106b,以驱动臂 2106在存储位置和清洁位置(以及垫组件2108的轨迹上的任何其他位置)之间移动垫组件2108。
154.链轮2126可以是滑轮、齿轮等,其可以由引导件2122支撑(因此支撑到主体2102),
并且可以在引导件2122中旋转。链轮2126的至少一部分可以与链条2124接合。链轮2126也可以连接到横轴2118,使得马达2116的旋转可以驱动横轴2118的旋转,从而驱动链轮2126的旋转,链轮2126可以驱动所述链条2124,从而驱动所述臂2106沿着臂履带2132和链条履带 2130运动。链条驱动系统2120的进一步细节和操作将在下面讨论。
155.图23a示出了移动清洁机器人2100的一部分的等距视图。图23b示出了移动清洁机器人2100的一部分的等距视图。图23a和23b将在下面一起讨论。图23a和23b的机器人2100可以与上面讨论的机器人2100一致;机器人2100的额外细节将在下面参照图23a和23b进行讨论。例如,图 23b示出了臂2106如何连接到引导件2122。
156.臂2106可以包括凸台2134,其可以是销、柱等。凸台2134可以位于臂履带2132中,并且可以沿着臂履带2132在其中平移,其中履带2132可以是基本线性的或直的。臂履带2132可以是弯曲的、弧形的或者在其他示例中可以具有其他形状。履带2132可以位于链条履带2130的上方,但是可以位于链条履带2130的中间或者链条履带2130的下方。
157.臂2106还可以包括销2136,销2136可以是柱、凸台等。销2136可以连接到链条2124的链节或与链条2124的链节接合,使得链条2124在链条履带2130中的运动可以使销2136沿着链条履带2130运动并因此使臂 2106(或其一部分)运动。链条履带2130可以是椭圆形的,并且可以围绕引导件2122的周边(或周边的一部分)连续。可选地,链条履带2310可以是不完整的。在其他示例中,链条履带2130可以具有其他形状。
158.图23a和23b也显示了盖板2128的更多细节。在臂2106的组装中,盖板2128可以被移除,并且凸台2134可以插入臂履带2132中,例如通过图23b中虚线所示的履带孔2138。凸台2134的头部可以被设定尺寸为使得其可插入穿过履带孔2138,但是大于臂履带2132,使得一旦凸台2134的头部被插入穿过孔2138,则凸台2134可以被移动到臂履带2132中,其中凸台 2134不能退出。当安装盖板2128时,凸台2134不能接近孔2138,因此被捕获在臂履带2132中。当安装时,盖板2128还可以覆盖链条履带2130的一部分,使得臂2106(或其支撑链条链节)的销2136可以接合盖板2128,以充当链条履带2130的顶部或链条履带2130的下部中的行程止动件。
159.在操作中,当垫2108处于存储位置时,凸台2134可以位于臂履带2132 的第一端,销2136可以位于链条履带2130的上部,如图22所示。当需要将臂2106从存储位置移动到清洁位置(如图23a和23b所示)时,可以操作马达2116(例如通过控制器2111或220)来旋转横轴2118,以驱动所述链轮 2126,使得链条2124在链条履带2130内移动。链条2124沿着链条履带2130 的运动可以导致销2136沿着链条履带2130运动,例如从图22所示的上部运动到图23b所示的下部。
160.在臂2106和销2136运动期间,凸台2134可以在臂履带2132的端部之间在臂履带2132中平移。凸台2134在臂履带2132中的运动和销2136在链条履带2130中的运动可以一起限定臂2106和垫组件2108相对于主体2102 的运动轮廓或轨迹。为了将垫组件2108从清洁位置移动到存储位置,马达 2116可以反向驱动,以驱动所述臂2106在相反方向上围绕链条履带2130旋转(如由凸台2134和臂履带2132引导的)。引导件2122和链条2124由此可以驱动和引导所述臂2106和垫组件2108的运动,使得当垫组件2108在清洁位置和存储位置之间运动时,臂履带2132和链条履带2130可以一起至少部分地限定垫组件2108的轨迹。可选地,臂履带2132可以延伸超过链条履带2130,以有助于限定臂2106和垫组件2108的有效行进路
径。下面的图 29a-29c显示了臂2106如何响应于这种运动。
161.图24a示出了移动清洁机器人2100的链轮2126的侧视图。图24b示出了移动清洁机器人2100的一部分的等距视图。图24a和23b的链轮2126 可以与上面讨论的机器人2100一致;链轮2126的额外细节将在下面参照图 24b和24a进行讨论。
162.例如,图24a示出链轮2126可以限定外周2140和内孔2142。外周2140 可以被构造(例如,尺寸或形状)成配合在引导件2122内,并在其上或其周围接收链条2124。外周2140可以限定凹口2144,以接收链条2124(其用于支撑所述销2136)的链节(如下面进一步详细讨论的)。内孔2142可以被构造 (例如,尺寸或形状)成在其中接收横轴2118,例如d轴。横轴2118(或轴2118 的端部)可以具有与内孔2142互补的形状,例如d形,以与内孔2142配合,并且有助于将旋转从横轴2118传递到链轮2126,并且有助于限制横轴2118 相对于链轮2126的相对旋转。
163.链轮2126还可以包括限定间隙2148a-2148n(统称为间隙2148)的齿2146。间隙2148可以各自被构造(例如,尺寸和形状)成在其中接收链条2124的齿或突起,例如将链轮2126的旋转传递给链条2124。间隙2148d的尺寸可以被设定为接收链条2124的齿或销齿,如下面进一步详细讨论的。然而,凹口2144和间隙2148d是能够接收链条2124的销齿的唯一间隙2148d,这有助于确保链条2124的正确正时(timing)或运动,从而确保臂2106和垫组件2108的正确正时或运动。链轮2126还可以包括驱动齿轮2150,该驱动齿轮可操作为操作机器人2100的悬架系统。
164.图25a示出了移动清洁机器人的链条2124的等距视图。图25b示出了移动清洁机器人的链条2124的正视图。图25a和25b的链条2124可以与上面讨论的机器人2100一致;链条2124的其他细节将在下面参照图25a和 25b进行讨论。
165.例如,图25a示出链条2124可以包括挠曲件2152,挠曲件2152可以是条带、带节、背衬等,其构造成支撑挠曲件2152外部上的多个支撑件2154a
‑ꢀ
2154n(统称为支撑件2154)和挠曲件2152内部上的多个齿2156a-2156n(统称为齿2156)。挠曲件2152还可以包括臂连接件2158来代替一个齿和支撑件,其中臂连接件2158可以限定孔2160。孔2160可以被构造成在其中接收臂 2106的销2136,以将臂2106固定到链条2124上。臂连接件2158可以限定圆柱形或其他形状,其被构造为由上面针对图24a和24b讨论的间隙2148d 接收。
166.齿2156可以各自具有t形形状,从侧面看具有弯曲的顶部,使得每个齿2156可以与滑轮或链轮2126的凹部或间隙2148接合。如图25b所示,支撑件2154可以各自具有t形形状,从侧面看带有弯曲顶部,以基本匹配齿2156的轮廓。因为支撑件2154和齿2156的弯曲部分一起形成相对圆形的轮廓,所以可以防止支撑件2154和齿2156在引导件2122的链条履带2130 内束缚或聚束。支撑件2154和齿2156的弯曲部分与链条履带2130的接触也有助于在操作过程中限制挠曲件2152的偏转。
167.图25b还示出了支撑件2154可以各自限定支撑件2154和挠曲件2152 之间的间隙g1,并且齿2156可以各自限定齿2156和挠曲件2152之间的间隙g2。间隙g1和g2可以允许挠曲件2152相对较长,这可以有助于允许挠曲件2152弯曲或挠曲,以有助于链条2124弯曲或挠曲,并且当链条2124 围绕引导件2122的链条履带2130的形状移动时,有助于降低应力集中。链条2124中这种应力集中的减少有助于减少链条2124的失效。
168.间隙g1和g2也允许挠曲件2152具有变化的厚度。更具体地,挠曲件 2152在支撑件
2154和齿2156附近可以具有厚度t1(从横向角度看,如图25b 所示),并且挠曲件2152在每对支撑件2154和齿2156之间的中点附近可以具有厚度t2(从横向角度看),其中厚度t2小于厚度t1。减小的厚度t2可有助于允许挠曲件2152挠曲或弯曲,以有助于链条2124贴合引导件2122的链条履带2130并围绕其运动。
169.图26示出了移动清洁机器人的臂2106a的等距视图。图26的臂2106a 可以与上面讨论的机器人2100一致;臂2106a的额外细节将在下面参照图 26进行讨论。
170.例如,图26示出了臂2106a可以包括主体2162,主体2162包括前部 2164、中部2166和后部2168。销2136可以在前部2164附近连接到主体 2162,并且凸台2134可以连接到前部2164,例如在臂2106a的前端附近。凸台2134可以包括直径大于凸台2134的头部2170,其中头部2170可以通过履带孔2138插入,如上面参考图23b所讨论的。
171.前部2164可以相对于中部2166成角度,中部2166可以相对于后部2168 成角度,以有助于限定垫组件2108的运动轨迹以及臂2106和垫组件2108 的存储和清洁位置。后部2168可以被构造为连接到垫组件2108,如下面进一步详细讨论的。主体2162、销2136和凸台2134都可以是由聚合物、金属等中的一种或多种制成的刚性或半刚性构件。在一些示例中,臂2106a(及其部件)可以由铝制成。在一些示例中,销2135或凸台2134可以由与主体2162 不同的材料制成,例如低摩擦材料(例如,聚合物),或者可以具有一个或多个涂层(例如,聚四氟乙烯)或终加工部分(例如,高抛光铝),例如以有助于减少臂2106和引导件2122之间的摩擦和磨损。
172.可选地,销2136可以包括卡扣特征或突起,用于与臂连接件2158的孔 2160接合,例如在臂连接件2158和销2136之间形成卡扣界面,以有助于将臂2106固定到链条2124上。
173.图27示出了移动清洁机器人2100的一部分的等距视图。图27的移动清洁机器人2100可以与上面讨论的机器人2100一致;机器人2100的额外细节将在下面参照图27进行讨论。
174.例如,图27示出机器人2000的主体2102可以包括用于垫组件2108的存储表面2172。存储表面2172可以包括位于存储表面2172的相反侧的突起2176a和2176b。存储表面2172可以包括定位或位于存储表面2172中心附近的突起2178。突起2178和2176一起可以接合垫组件2108的垫托盘 2174,以在垫组件2108处于存储位置时定位垫组件2108的垫,使得垫组件 2108的垫不会支配托盘2174相对于主体2102和存储表面2172的位置。
175.在存储位置,垫组件2108可以旋转,例如允许用户更换垫组件2108的清洁垫。引导件2122可以被修改为适应垫组件2108和臂2106的这种运动,如下面参考图28a和28b所讨论的。
176.当垫组件2108在存储位置绕臂2106旋转时,垫组件2108和臂2106之间的接触可以限制相对于臂的这种旋转。相对旋转可以限制在60度、75度、 80度或85度。在一些示例中,旋转可以被限制为85度,例如允许用户有间隙来更换垫组件2108的垫,但是也防止垫组件2108卡在竖直位置或垫面朝上的位置。
177.图28a示出了移动清洁机器人2100的引导件2122的等距视图。图28b 示出了移动清洁机器人2100的引导件2122的等距视图。图28a和28b将在下面一起讨论。图28a和28b的引导件2122可以与上面讨论的引导件 2122一致;下面将参照图28a和28b讨论引导件2122的其他细节。
178.例如,图2a和28b示出了引导件2122的链条履带2130中的凹口2182a 和2182b。凹口2182a和2182b可以在其中接收臂连接件2158和销2136的至少一部分,例如允许链条2124的臂连接件2158和销2136的在链条履带 2130内或相对于链条履带2130移动。类似地,臂履带2132可以包括凹口 2184,该凹口2184被构造成允许凸台2134在臂履带2132内或相对于臂履带2132移动。凸台2134和销2136的这种运动可以允许臂2106偏离其轨迹,并且更具体地,可以允许垫组件2108相对于主体2102和存储表面2172 旋转或倾斜,例如当臂2106和垫组件2108处于存储位置并且倾斜以更换垫时,用于更换清洁垫。由凹口2182和2184实现的臂2106的行程量可以在 1毫米(mm)和10毫米之间。在一些示例中,行程量可以是5毫米。
179.图28a和28b还示出了链条履带2130可以包括凹口2186,以在其中接收臂连接件2158和销2136的的至少一部分,例如允许链条2124的臂连接件2158和销2136的在链条履带2130内或相对于链条履带2130移动。销 2136的这种移动可以允许臂2106偏离其轨迹,并且更具体地,可以允许垫组件2108在垫组件2108处于清洁位置时稍微移动。当处于清洁或展开位置时,垫组件2108的这种移动可以允许垫组件2108竖直浮动,以允许垫组件 2108对清洁程序期间垫组件2108遇到的不平坦表面或障碍物做出响应。凹口2186所允许的臂2106的行程量可以在1毫米(mm)和10毫米之间。在一些示例中,行程量可以是5毫米。
180.此外,机器人2100的后部可以被构造为坐落在垫组件2108上,或者使其负载至少部分地分布到垫组件2108,使得机器人2100的后部的位置或坐落高度至少部分地由垫组件2108和地板之间的接合来限定。当处于清洁或展开位置时,垫组件2108的上述运动可以有助于确保垫组件2108的位置不会受到过度限制。
181.图29a示出了移动清洁机器人2100的一部分的等距视图。图29b示出了移动清洁机器人2100的一部分的等距视图。图29c示出了移动清洁机器人2100的一部分的等距视图。图29a-29c示出了当链轮2126被驱动旋转时,链条2124如何被驱动以将臂2106从如图29a所示的展开位置移动到如图29c所示的存储位置。
182.图30示出了移动清洁机器人2100的一部分的侧视图。图30的机器人 2100可以与上面讨论的机器人2100一致;图30示出了当垫组件2108处于展开位置时,垫组件2108的垫2188如何能够与地面50接合。图30还示出了当垫组件2108处于展开或清洁位置时,臂2106的主体2162的后部2168 如何相对于垫组件2108取向,如下面参照图31a和31b进一步详细讨论的。
183.可选地,当臂2106处于完全展开位置并且垫组件2108处于清洁位置时,臂2106可以被垫驱动系统2114间歇地驱动,以过度旋转(over-rotate)。垫组件2108的这种间歇运动有助于产生垫2188在地面50上的擦洗运动或动作,这有助于提高机器人2100的清洁性能。
184.图31a示出了移动清洁机器人2100的臂2106和垫组件2108的等距视图。图31b示出了移动清洁机器人2100的臂2106和垫组件2108的等距视图。图31a和31b将在下面一起讨论。图31a和31b的移动清洁机器人 2100的臂2106和垫组件2108可以与上述机器人2100一致;臂2106和垫组件2108的额外细节将在下面参照图31a和31b进行讨论。
185.例如,图31a和31b示出了臂2106的主体2162的后部2168可以包括止动件2190,并且示出了垫组件2108的托盘2174可以包括凹部2192。凹部2192可以与止动件2190互补,使得凹部2192的尺寸和形状适于接收止动件2190并接合止动件2190,例如当垫不与地面50接合时。
186.在一些示例的操作中,当臂2106从存储位置移动到清洁位置(如图30所示)时,垫组件2108可以绕臂2106a和2106b自由旋转。没有对这种旋转的限制,垫组件2108可以围绕臂2106旋转以摆动到竖直取向,潜在地导致垫组件2108不能展开到清洁位置。止动件2190与凹部2192的接合可以有助于限制垫组件2108相对于臂2106的旋转,以有助于防止垫组件2108相对于臂2106过度旋转,有助于确保垫组件2108可靠且正确地展开到清洁位置。
187.图32示出了移动清洁机器人2100的驱动系统2114的等距视图。图32 更清楚地示出了马达2116可以连接到齿轮箱2194,齿轮箱2194可以连接到横轴2118。齿轮箱2194可以包括一个或多个齿轮,以使用马达2116获得横轴2118的期望转速。
188.图32还示出了编码器2196,其可以连接到齿轮箱2194和横轴2118。这样,编码器2196可以监测横轴2118(或驱动所述横轴120的轴)的位置,该位置可以通过位置信号(或编码器信号)传输到控制器2111。控制器2111由此可以确定垫组件2108相对于机器人2100的位置。控制器2111可以使用这些位置来引导机器人2100的移动和动作。例如,当垫组件2108从存储位置移动到展开或清洁位置时,控制器2111可以控制马达的转速以保持垫组件2108的恒定(或更一致)移动速度。此外,编码器2196可以是绝对编码器,其可以允许控制器2111始终知道垫组件2108的位置,即使在断电的情况下。这有助于在机器人2100重启或启动时限制对驱动系统2114的校准需求。
189.更具体地,因为臂2106(因此垫组件2108)由链条2124围绕链条履带 2130驱动,所以例如当销2136围绕链轮2126移动时,臂2106和垫组件2108的移动可以更快。因为控制器2111可以确定销2136何时将绕过链轮 2126,所以控制器2111可以在该运动窗口期间减慢马达2116的旋转速度,以减慢垫组件2108相对于主体2102的运动。一旦销2136已经移动经过滑轮,则马达2116的旋转速度就可以增加。马达2116的速度的这种操纵可以有助于提供垫组件2108的更一致的运动。
190.图33示出了移动清洁机器人2100的链条驱动系统2120的等距视图。图33的链驱动系统2120可以与上面讨论的链驱动系统2120一致。图33示出了臂履带2132可以在臂履带2132的一个或多个端部连接到碎屑狭槽2198。
191.因为机器人2100可以在吸尘操作期间吸入碎屑,所以细小的碎屑可以在机器人的部件内积聚,并且可以在引导件2122内积聚。这种碎屑在臂履带2132内的堆积是不希望的,因为臂履带2132与凸台2134和销2136以及链条履带2130一起引导或限定了臂2106和垫组件2108的轨迹。如果碎屑积聚在臂履带2132中,臂2106和垫组件2108的运动或移动范围会受到限制。碎屑狭槽2198会通过允许凸台2134将臂履带2132内的碎屑推出碎屑狭槽2198而有助于限制碎屑在臂履带2132内的积聚,有助于确保垫组件 2108可以如预期的那样相对于主体2102移动。
192.图34示出了移动清洁机器人3400的一部分的俯视图。机器人3400可以类似于上面讨论的机器人,例如机器人2100。图34示出了臂3406的横向运动是如何受到限制的。
193.更具体地,相应臂的凸台3134可以连接到引导件3122,销3136可以连接到引导件3122内的链条。臂3406也可以连接到垫组件3408的相反侧。因为臂3406通过间隙3199与主体3402隔开,所以臂3406a朝向臂3406b 的横向运动受到臂3406a和主体3102之间的接触的限制,从而限制了垫组件3408的横向运动。臂3406b可以类似地通过与主体3402的接合而受到约束,使得臂3406和垫组件3408横向移动的能力相对受限。
194.图35示出了移动清洁机器人2100的链条或带2124的等距视图。带2124 可以与上面讨论的链条或带2124一致;图35显示了链条或带2124的额外细节。
195.例如,图35示出支撑件2154可以限定外表面2151,齿2156可以限定内表面2153。外表面2151可以是圆形的,以便在与引导件2122接合时减小压力。类似地,内表面2153可以是圆形的,以便在与引导件2122接合时减小压力。内表面2153也可以成形为与链轮2126的间隙2148互补,例如有助于改善链轮2126和链条2124之间的接合。
196.图35还示出了齿2156可具有的宽度w1比挠曲件2152的宽度w2短,二者相差宽度w3,使得齿2156的端部2155可以从挠曲件2152的端部2157 退回,这可以有助于在齿2156接合链轮2126时将齿2156保持位于一个或多个间隙2148中,如下面参考图36a和36b进一步详细讨论的。
197.图36a示出了移动清洁机器人2100的一部分的等距视图。图36b示出了移动清洁机器人2100的一部分的等距视图。图36a和36b将在下面一起讨论。
198.图36a和36b示出了齿2156在链轮2126的间隙或凹部2148内的接合。图36a和36b还示出了间隙2148的外部可以包括或限定引导件2159。引导件2159可以是倒角、半径或具有与链轮2126的旋转轴线成角度或不垂直的另一形状的表面。引导件2159可以被构造(例如,尺寸或形状)成接合齿 2156(或链条2124的另一部分)的端部2155(或另一部分),以在链轮2126和链条2124旋转期间有助于限制或防止齿2156移动或脱出间隙2148。
199.也就是说,当链条2124(例如,齿2156或任何齿)确实开始横向向外运动(例如,平行于链轮2126的旋转轴线)时,它会导致链条2124不正确地动作(例如,与链轮2126脱离)。因为引导件2159的角度和形状设定为控制这种运动,所以齿2156的端部2155与引导件2159的接合可以导致齿2156横向移回到间隙2148中,以有助于限制或防止齿2156在链轮2126和链条2124 旋转期间从间隙2148中脱出。
200.注释和示例
201.以下非限制性示例详述了本主题的某些方面,以解决挑战并提供本文所讨论的益处等。
202.示例1是一种可操作为清洁环境的地面的移动清洁机器人,该移动清洁机器人包括:主体;驱动系统,其连接到所述主体并且可操作为围绕地面移动所述移动清洁机器人;真空系统,其连接到所述主体并且包括可操作为从环境的地面吸取碎屑的吸取器;以及连接到主体的清洁系统,该清洁系统包括: 可与地面接合的拖地垫组件;连接到拖地垫组件的连杆;以及连接到连杆和主体的垫驱动系统,该垫驱动系统可操作为在拖地垫与地面可接合的清洁位置和存储位置之间移动拖地垫组件。
203.在示例2中,示例1的主题可选地包括,其中垫驱动系统包括:连接到主体并连接到连杆的驱动履带,驱动履带可操作以移动连杆,从而在清洁位置和存储位置之间移动拖地垫组件。
204.在示例3中,示例2的主题可选地包括,其中主体包括位于主体相反侧的第一狭槽和第二狭槽,并且其中连杆包括分别至少部分位于第一狭槽和第二狭槽中的第一臂和第二臂,第一狭槽和第二狭槽被构造为引导第一臂和第二臂的运动,以在清洁位置和存储位置之间移动拖地垫组件。
205.在示例4中,示例3的主题可选地包括,其中连杆包括连接构件,该连接构件连接到
第一臂和第二臂并与拖地垫组件接合,以在拖地垫组件处于清洁位置时将向下的力传递到拖地垫组件。
206.在示例5中,示例4的主题可选地包括,其中第一臂、第二臂和连接构件被构造成响应于向下的力而挠曲,以将向下的力分布在拖地垫组件上。
207.在示例6中,示例4-5中任一个或多个的主题可选地包括,其中第一臂、第二臂和连接构件被构造成响应于向下的力而挠,以将向下的力分布在拖地垫组件上。
208.在示例7中,示例3-6中任一个或多个的主题可选地包括,其中驱动履带包括连接到第一臂和第二臂的驱动条带,驱动履带被驱动,以围绕滑轮旋转,以在清洁位置和存储位置之间移动连杆和拖地垫。
209.在示例8中,示例3-7中任一个或多个的主题可选地包括,其中拖地垫在清洁位置至少部分位于主体下方,在存储位置至少部分位于主体上方。
210.在示例9中,示例8的主题可选地包括,其中主体包括存储狭槽,该存储狭槽可与连杆的第一臂接合,以将拖地垫组件引入和引出存储位置。
211.在示例10中,示例9的主题可选地包括其中存储狭槽位于主体的顶部。
212.示例11是可操作为清洁环境的地面的移动清洁机器人,该移动清洁机器人包括:主体;驱动系统,其连接到所述主体并且可操作以围绕地面移动所述移动清洁机器人;真空系统,其连接到所述主体并且包括可操作为从环境的地面吸取碎屑的吸取器;以及连接到主体的清洁系统,该清洁系统包括:可与地面接合的拖地垫组件;连接到拖地垫组件和主体的垫驱动系统,该垫驱动系统可操作为在拖地垫可与地面接合的清洁位置和存储位置之间移动拖地垫组件。
213.在示例12中,示例11的主题可选地包括,其中垫驱动系统包括:连接到主体并连接到拖地垫组件的驱动履带,该驱动履带可操作为在清洁位置和存储位置之间移动拖地垫组件。
214.在示例13中,示例12的主题可选地包括,其中垫驱动系统包括:连接到驱动履带并连接到拖地垫组件的履带连接件,履带连接件可与驱动履带一起移动,以在清洁位置和存储位置之间移动拖地垫组件。
215.在示例14中,示例13的主题可选地包括,其中垫驱动系统包括:与驱动履带接合并连接到主体的滑轮,滑轮可旋转以允许驱动履带移动所述履带连接件。
216.在示例15中,示例14的主题可选地包括,其中垫连接件包括连接到驱动履带的指状件,并且其中滑轮包括多个径向凹口,该多个径向凹口被构造成当垫连接件经过驱动履带上的滑轮时接收指状件。
217.在示例16中,示例13-15中任一个或多个的主题可选地包括,其中拖地垫组件包括:可与地面接合的拖地垫;以及连接到拖地垫并连接到履带连接件的拖地托盘。
218.在示例17中,示例16的主题可选地包括,其中拖地托盘包括凸台,该凸台远离垫延伸并延伸穿过履带连接件的孔,凸台和孔被构造成当拖地垫组件处于清洁位置时引导拖地托盘相对于履带连接件的运动。
219.在示例18中,示例17的主题可选地包括,其中当拖地垫组件处于清洁位置时,凸台可与主体接合,以限制拖地托盘相对于履带连接件的移动。
220.在示例19中,示例12-18中任何一个或多个的主题可选地包括,其中驱动履带围绕
主体的外边缘从主体的底部延伸到主体的顶部。
221.在示例20中,示例11-19中任一个或多个的主题可选地包括,其中垫驱动系统包括:连接到主体并连接到拖地垫组件的第二驱动履带,第二驱动履带可与所述驱动履带一起操作,以在清洁位置和存储位置之间移动拖地垫组件。
222.示例21是可操作为清洁环境的地面的移动清洁机器人,该移动清洁机器人包括:主体;驱动系统,其连接到所述主体并且可操作以围绕地面移动所述移动清洁机器人;真空系统,其连接到主体并包括可操作为从环境的地面吸取碎屑的吸取器;以及连接到主体的清洁系统,该清洁系统包括:可与地面接合的拖地垫组件;连接到拖地垫组件和主体的垫驱动系统,该垫驱动系统可操作为在拖地垫可与地面接合的清洁位置和存储位置之间移动拖地垫组件。
223.在示例22中,示例21的主题可选地包括,其中拖地垫组件包括:沿着纵轴延伸并连接到主体的垫,该垫可相对于主体在清洁位置和存储位置之间旋转。
224.在示例23中,示例22的主题可选地包括,其中拖地垫组件包括:沿着纵轴延伸并连接到主体和垫的芯部,该芯部可与垫一起在清洁位置和存储位置之间旋转。
225.在示例24中,示例23的主题可选地包括,其中垫连接到芯部的径向外部。
226.在示例25中,示例24的主题可选地包括,其中芯部包括与垫相对的平坦部分,其中当垫旋转到存储位置时,平坦部分朝向清洁表面取向,并且其中当垫旋转到清洁位置时,平坦部分远离清洁表面取向。
227.在示例26中,示例25的主题可选地包括,其中垫围绕芯部的周向延伸 180度,使得所述垫在垫和芯部180度的旋转范围与地板是可接合的。
228.在示例27中,示例26的主题可选地包括马达,该马达连接到芯部,以在清洁位置和存储位置之间旋转芯部和垫。
229.在示例28中,示例27的主题可选地包括控制器,其与马达通信,以基于检测到的地面类型来旋转芯部和垫。
230.在示例29中,示例27-28中任何一个或多个的主题可选地包括控制器,其与马达通信,以基于在垫与地板可接合的旋转范围的每个位置处垫与清洁表面接合的时间而在移动清洁机器人的整个清洁任务中控制芯部的旋转。
231.在示例30中,示例22-29中任一个或多个的主题可选地包括,其中垫是顺应性垫。
232.示例31是可操作为清洁环境的地面的移动清洁机器人,该移动清洁机器人包括:主体;驱动系统,其连接到所述主体并且可操作为围绕地面移动所述移动清洁机器人;以及连接到主体的清洁系统,该清洁系统包括:可与地面接合的拖地垫组件;连接到拖地垫组件的连杆;以及连接到连杆和主体的垫驱动系统,该垫驱动系统可操作为在拖地垫可与地面接合的清洁位置和存储位置之间移动拖地垫组件。
233.在示例32中,示例31的主题可选地包括,其中垫驱动系统包括:连接到主体并连接到连杆的驱动履带,驱动履带可操作为移动所述连杆,从而在清洁位置和存储位置之间移动拖地垫组件。
234.在示例33中,示例32的主题可选地包括,其中主体包括位于主体相对侧的第一狭槽和第二狭槽,并且其中连杆包括分别至少部分位于第一狭槽和第二狭槽中的第一臂和第二臂,第一狭槽和第二狭槽被构造为引导第一臂和第二臂的运动,以在清洁位置和存储位
置之间移动拖地垫组件。
235.在示例34中,示例33的主题可选地包括,其中连杆包括连接构件,其连接到第一臂和第二臂并与拖地垫组件接合,以在拖地垫组件处于清洁位置时将向下的力传递到拖地垫组件。
236.在示例35中,示例34的主题可选地包括,其中第一臂、第二臂和连接构件被构造成响应向下的力而挠曲,以将向下的力分布在拖地垫组件上。
237.示例36是可操作为清洁环境的地面的移动清洁机器人,该移动清洁机器人包括:主体;驱动系统,其连接到所述主体并且可操作为围绕地面移动所述移动清洁机器人;以及连接到主体的清洁系统,该清洁系统包括:可与地面接合的拖地垫组件;连接到拖地垫组件和主体的垫驱动系统,该垫驱动系统可操作为在拖地垫可与地面接合的清洁位置和存储位置之间移动拖地垫组件。
238.在示例37中,示例36的主题可选地包括,其中垫驱动系统包括:连接到主体并连接到拖地垫组件的驱动履带,该驱动履带可操作为在清洁位置和存储位置之间移动拖地垫组件。
239.示例38中,示例37的主题可选地包括,其中垫驱动系统包括:连接到驱动履带并连接到拖地垫组件的履带连接件,该履带连接件可与驱动履带一起移动,以在清洁位置和存储位置之间移动拖地垫组件。
240.在示例39中,示例38的主题可选地包括,其中垫驱动系统包括:与驱动履带接合并连接到主体的滑轮,该滑轮可旋转以允许驱动履带移动所述履带连接件。
241.在示例40中,示例39的主题可选地包括,其中垫连接件包括连接到驱动履带的指状件,并且其中滑轮包括多个径向凹口,该多个径向凹口被构造成当垫连接件经过驱动履带上的滑轮时接收指状件。
242.示例41是可操作为清洁环境的地面的移动清洁机器人,该移动清洁机器人包括:主体;驱动系统,其连接到所述主体并且可操作为围绕地面移动所述移动清洁机器人;以及连接到主体的清洁系统,该清洁系统包括:可与地面接合的拖地垫组件;连接到拖地垫组件和主体的垫驱动系统,该垫驱动系统可操作为在拖地垫可与地面接合的清洁位置和存储位置之间移动拖地垫组件。
243.在示例42中,示例41的主题可选地包括,其中拖地垫组件包括:沿着纵轴延伸并连接到主体的垫,该垫可相对于主体在清洁位置和存储位置之间旋转。
244.在示例43中,示例42的主题可选地包括,其中拖地垫组件包括:沿着纵轴延伸并连接到主体和垫的芯部,该芯部可与垫一起在清洁位置和存储位置之间旋转。
245.在示例44中,示例43的主题可选地包括,其中垫连接到芯部的径向外部。
246.在示例45中,示例44的主题可选地包括,其中芯部包括与垫相对的平坦部分,其中当垫旋转到存储位置时,平坦部分朝向清洁表面取向,并且其中当垫旋转到清洁位置时,平坦部分远离清洁表面取向。
247.示例46是一种移动清洁机器人,其包括:主体;连接到主体并可相对于主体移动的垫组件;以及垫驱动系统,其连接到主体并可操作为在存储位置和清洁位置之间相对于主体移动垫组件。
248.在示例47中,示例46的主题可选地包括垫组件,该垫组件还包括:垫托盘,其被构
造为支撑可与地面接合的清洁垫;一个或多个臂,其分别连接到垫托盘并分别连接到垫驱动系统;以及连接到臂上的驱动条带或链条。
249.在示例48中,示例47的主题可选地包括驱动系统,该驱动系统还包括: 连接到主体并可相对于主体旋转的滑轮或链轮,该滑轮或链轮与驱动条带或链条接合并可操作为驱动条带或链条来移动所述臂。
250.在示例49中,示例48的主题可选地包括驱动系统,该驱动系统还包括: 带或链条引导件,其连接到主体并限定至少部分地围绕驱动条带或链条的至少一部分的条带或链条履带的至少一部分。
251.在示例50中,示例49的主题可选地包括条带或链条盖,其连接到条带或链条引导件,以覆盖条带或链条履带的至少一部分。
252.在示例51中,示例49-50中任何一个或多个的主题可选地包括,其中引导件限定支撑所述臂中的单个臂的至少一部分的臂履带。
253.在示例52中,示例51的主题可选地包括其中臂履带延伸超过链条引导件的端部。
254.在示例53中,示例51-52中任一个或多个的主题可选地包括,其中当垫组件在存储位置和清洁位置之间移动时,臂履带和条带或链条引导件一起限定垫组件的轨迹。
255.在示例54中,示例48-53中任一个或多个的主题可选地包括,其中条带或链条包括支撑多个齿的挠曲部分,这些齿可与滑轮或链轮的凹部接合。
256.在示例55中,示例54的主题可选地包括,其中条带或链条包括代替条带或链条的这些齿中的单个齿的臂连接件,条带或链条连接件连接到臂,并且其中滑轮或链轮包括构造成在其中接收臂连接件或齿的凹口。
257.在示例56中,示例55的主题可选地包括,其中滑轮或链轮的多个凹部中的单个凹部被构造成接收这些齿中的单个齿,而不是臂连接件。
258.在示例57中,示例55-56中任一个或多个的主题可选地包括,其中从侧面角度看,多个齿中的单个齿具有被倒圆的丁字形状。
259.在示例58中,示例57的主题可选地包括,其中条带或链条包括从挠曲部分延伸的支撑件,分别与多个齿中的单个齿相对。
260.在示例59中,示例54-58中任一个或多个的主题可选地包括其中挠曲部分的厚度在齿中的单个齿之间减小。
261.示例60是一种移动清洁机器人,其包括:主体;垫托盘,其被构造为支撑可与地面接合的清洁垫;连接到垫托盘的臂;以及连接到主体并连接到臂的垫驱动系统,该垫驱动系统可操作为相对于主体在存储位置和清洁垫可与地面接合的清洁位置之间移动臂和垫托盘。
262.在示例61中,示例60的主题可选地包括垫驱动系统,该垫驱动系统还包括:连接到臂的驱动条带或链条;以及连接到主体并可相对于主体旋转的滑轮或链轮,该滑轮或链轮与驱动条带或链条接合并可操作以驱动条带或链条来移动臂。
263.在示例62中,示例61的主题可选地包括垫驱动系统,该垫驱动系统还包括:条带或链条引导件,其连接到主体并限定至少部分地围绕驱动条带或链条的至少一部分的条带或链条履带的至少一部分。
264.在示例63中,示例62的主题可选地包括条带或链条盖,其连接到条带或链条引导
件,以覆盖条带或链条履带的至少一部分。
265.在示例64中,示例63的主题可选地包括,其中引导件限定支撑臂中的单个臂的至少一部分的臂履带。
266.示例65是一种移动清洁机器人,其包括:主体;垫托盘,其被构造为支撑可与地面接合的清洁垫;连接到垫托盘的臂;连接到主体并连接到臂的垫驱动系统;以及控制器,其可操作为:指示垫驱动系统相对于主体在存储位置和清洁垫可与地面接合的清洁位置之间移动臂和垫托盘。
267.在示例66中,示例65的主题可选地包括,其中控制器还被构造为:从连接到驱动系统的编码器接收驱动位置信号;并且基于该驱动位置信号指示垫驱动系统。
268.在示例67中,示例66的主题可选地包括,其中控制器还被构造为:基于该驱动位置信号调节驱动系统的速度。
269.示例68是一种操作移动清洁机器人的方法,该方法包括:在整个环境中导航机器人;将机器人的清洁垫从存储位置移动到清洁位置;以及将机器人的清洁垫从存储位置移动到清洁位置。
270.在示例69中,示例68的主题可选地包括基于清洁垫的位置产生位置信号;以及基于驱动位置信号指示垫驱动系统移动清洁垫。
271.在示例70中,示例69的主题可选地包括基于位置信号调节驱动系统的速度。
272.在示例71中,示例69-70中任一个或多个的主题可选地包括操作真空系统以从环境中移除碎屑。
273.在示例72中,示例69-71中任一个或多个的主题可选地包括当垫处于清洁位置时拖擦环境的至少一部分地面。
274.在示例73中,示例1-72中的任何一个或任意组合的装置或方法可以可选地被构造成使得所列举的所有元件或选项都可供使用或选择。
275.以上详细描述包括对附图的参考,附图形成详细描述的一部分。附图以举例说明的方式示出了可以实施本实用新型的具体实施例。这些实施例在这里也被称为“示例”。这样的示例可以包括除了那些示出或描述的元件之外的元件。然而,本实用新型人还考虑了其中仅提供了那些示出或描述的元件的示例。此外,本实用新型人还考虑了使用示出或描述的那些元件(或其一个或多个方面)的任何组合或排列的示例,或者关于特定示例(或其一个或多个方面),或者关于本文示出或描述的其他示例(或其一个或多个方面)。
276.在本文档与任何通过引用并入的文档之间的用法不一致的情况下,则以本文档中的用法为准。
277.在本文件中,术语“一”或“一个”如专利文件中常见的那样,用于包括一个或不止一个,独立于“至少一个”或“一个或多个”的任何其他实例或用法。在本文件中,术语“或”用于指非排他性的或,使得例如“a或b”包括“a但不是b”、“b但不是a”和“a和b”,除非另有说明。在本文件中,术语“包括”和“在其中”用作相应术语“包含”和“其中”的简单英语等价物同样,在下面的权利要求中,术语“包括”和“包含”是开放式的,也就是说,除了权利要求中在这样的术语之后列出的那些之外,还包括元件的系统、装置、物品、组合物、制剂或过程仍然被认为落入该权利要求的范围内。此外,在以下权利要求中,术语“第一”、“第二”和“第三”等仅用作标签,并不打算对其对象强加数字要求。
278.以上描述旨在是说明性的,而非限制性的。例如,上述示例(或其一个或多个方面)可以彼此组合使用。可以使用其他实施例,例如本领域的普通技术人员在阅读以上描述后。提供摘要以符合37c.f.r.
§
1.72(b),允许读者快速确定技术公开的本质。提交本技术是基于这样的理解,即本技术将不用于解释或限制权利要求的范围或含义。此外,在上述详细描述中,各种特征可以组合在一起以简化本公开。这不应被解释为意在未要求保护的公开特征对于任何权利要求是必不可少的。相反,本实用新型的主题可能在于少于特定公开实施例的所有特征。因此,以下权利要求特此作为示例或实施例并入详细描述中,每个权利要求独立作为单独的实施例,并且预期这些实施例可以以各种组合或排列彼此组合。本实用新型的范围应参考所附权利要求以及这些权利要求所赋予的等效物的全部范围来确定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。