1.本发明涉及大地测量技术领域,尤其涉及一种辅助仪器整平的重力线密切方位角确定方法及装置。
背景技术:
2.测绘仪器装备(全站仪、经纬仪、水准仪等)在实施测量工作之前,必要工作之一是整平仪器,即调整仪器使其水平度盘处于铅垂线(重力方向)的正交方向,从而达到观测状态,直观呈现为仪器的圆水准气泡居中现象。就其本质而言,水准面作为大地测量基准面,仪器整平是通过调整仪器脚螺旋等装置使仪器水平方向与对应水准面重合。物理层面,水准面是一个重力等位面,处处与重力线正交。重力线作为一条空间曲线,当仪器水平方向与对应水准面重合时,相应重力线在该测点处的密切方位角(重力线曲率矢量与北方向夹角)亦唯一确定。然而,目前仪器整平实操与仿真过程未顾及重力线密切方位角参量的整平辅助作用及其理论指导内涵。
技术实现要素:
3.本发明针对目前测绘仪器整平实操与仿真过程未顾及重力线密切方位角参量的整平辅助作用及其理论指导内涵问题,利用重力线密切方位角与水准面间联系,提供一种辅助仪器整平的重力线密切方位角确定方法及装置,通过地球重力场模型计算重力线密切方位角,描述全球重力线密切方位角分布特征,进而给出辅助仪器整平的密切方位角调节参数,本发明可以定量刻画和描述仪器整平时重力线密切方位角参量,为丰富测量整平模块理论内涵、提升仪器测量工作准备效率提供理论技术依据。
4.为了实现上述目的,本发明采用以下技术方案:
5.本发明公开一种辅助仪器整平的重力线密切方位角确定方法,包括:
6.步骤1:基于地球重力场模型计算重力东向梯度;
7.步骤2:基于重力场模型计算重力北向梯度;
8.步骤3:基于得出的重力东向梯度及重力北向梯度计算重力线密切方位角。
9.进一步地,所述步骤1包括:
10.局部北东地坐标系条件下,水准面上任意一点p的重力东向梯度表示为
[0011][0012]
式中,gy表示重力北向梯度;g为重力;
[0013]gy
与重力位关系为
[0014][0015]
式中,w为重力位,重力位等于相应引力位和离心力之和,即
[0016]
w=v q (3)
[0017]
式中,v和q分别表示引力位和离心力位,地心球坐标系条件下,v和q的表达式分别为:
[0018][0019]
式中,ρ为研究点地心向径;θ和λ分别表示研究点地心余纬和地心经度;gm为地心引力常数;n和m分别代表球谐系数的阶与次,nmax表示球谐系数最高阶数;a表示椭球长半轴;和表示完全正常化球谐系数;为n阶m次完全正常化缔合勒让德函数;ω表示地球自转角速度;
[0020]
最终,局部指北坐标系下地球引力梯度v
yz
可表示为
[0021][0022]
其中
[0023][0024]
其中,完全正常化缔合勒让德函数递推式为
[0025][0026]
研究点离心力梯度在局部指北坐标系下表示为
[0027]qyz
=0 (9)
[0028]
进而得到w
yz
=v
yz
q
yz
;
[0029]
最终基于w
yz
、公式(2)得到局部北东地坐标系条件下,水准面上任意一点p的重力东向梯度。
[0030]
进一步地,所述步骤2包括:
[0031]
局部北东地坐标系条件下,水准面上任意一点p的重力北向梯度表示为
[0032][0033]
式中,g
x
为重力北向梯度;
[0034]gx
与重力位关系为
[0035][0036]
其中,重力位二阶梯度
[0037]wxz
=v
xz
q
xz (12)
[0038]
其中
[0039][0040]
式中,
[0041][0042]
研究点离心力梯度在局部指北坐标系下表示为
[0043][0044]
其中,
[0045][0046]
进一步地,所述步骤3包括:
[0047]
重力线曲率矢量与北方向夹角、即重力线密切方位角为α条件下,其与重力水平梯度相关,即
[0048][0049]
最终重力线密切方位角α为
[0050][0051]
本发明另一方面提出一种辅助仪器整平的重力线密切方位角确定装置,包括:
[0052]
重力东向梯度计算模块,用于基于地球重力场模型计算重力东向梯度;
[0053]
重力北向梯度计算模块,用于基于重力场模型计算重力北向梯度;
[0054]
重力线密切方位角计算模块,用于基于得出的重力东向梯度及重力北向梯度计算重力线密切方位角。
[0055]
进一步地,所述重力东向梯度计算模块具体用于:
[0056]
局部北东地坐标系条件下,水准面上任意一点p的重力东向梯度表示为
[0057][0058]
式中,gy表示重力北向梯度;g为重力;
[0059]gy
与重力位关系为
[0060][0061]
式中,w为重力位,重力位等于相应引力位和离心力之和,即
[0062]
w=v q (3)
[0063]
式中,v和q分别表示引力位和离心力位,地心球坐标系条件下,v和q的表达式分别
为:
[0064][0065]
式中,ρ为研究点地心向径;θ和λ分别表示研究点地心余纬和地心经度;gm为地心引力常数;n和m分别代表球谐系数的阶与次,nmax表示球谐系数最高阶数;a表示椭球长半轴;和表示完全正常化球谐系数;为n阶m次完全正常化缔合勒让德函数;ω表示地球自转角速度;
[0066]
最终,局部指北坐标系下地球引力梯度v
yz
可表示为
[0067][0068]
其中
[0069][0070]
其中,完全正常化缔合勒让德函数递推式为
[0071][0072]
研究点离心力梯度在局部指北坐标系下表示为
[0073]qyz
=0 (9)
[0074]
进而得到w
yz
=v
yz
q
yz
;
[0075]
最终基于w
yz
、公式(2)得到局部北东地坐标系条件下,水准面上任意一点p的重力东向梯度。
[0076]
进一步地,所述重力北向梯度计算模块具体用于:
[0077]
局部北东地坐标系条件下,水准面上任意一点p的重力北向梯度表示为
[0078][0079]
式中,g
x
为重力北向梯度;
[0080]gx
与重力位关系为
[0081][0082]
其中,重力位二阶梯度
[0083]wxz
=v
xz
q
xz (12)
[0084]
其中
[0085][0086]
式中,
[0087][0088]
研究点离心力梯度在局部指北坐标系下表示为
[0089][0090]
其中,
[0091][0092]
进一步地,所述重力线密切方位角计算模块具体用于:
[0093]
重力线曲率矢量与北方向夹角、即重力线密切方位角为α条件下,其与重力水平梯度相关,即
[0094][0095]
最终重力线密切方位角α为
[0096][0097]
与现有技术相比,本发明具有的有益效果:
[0098]
本发明利用重力线密切方位角与水准面间联系,提出一种辅助仪器整平的重力线密切方位角确定方法及装置,通过地球重力场模型计算重力线密切方位角,描述全球重力线密切方位角分布特征,从而可以给出辅助仪器整平的密切方位角调节参数,本发明可以定量刻画和描述仪器整平时重力线密切方位角参量,为提升仪器测量工作准备效率提供理论技术依据。
附图说明
[0099]
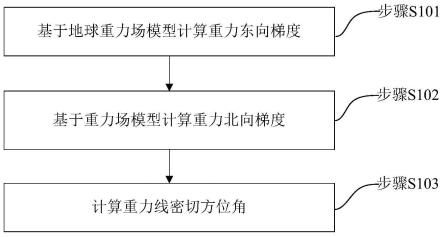
图1为本发明实施例一种辅助仪器整平的重力线密切方位角确定方法的基本流程图;
[0100]
图2为本发明实施例重力东向梯度分布图;
[0101]
图3为本发明实施例重力北向梯度分布图;
[0102]
图4为本发明实施例重力线密切方位角分布图;
[0103]
图5为本发明实施例一种辅助仪器整平的重力线密切方位角确定装置的结构示意图。
具体实施方式
[0104]
下面结合附图和具体的实施例对本发明做进一步的解释说明:
[0105]
如图1所示,一种辅助仪器整平的重力线密切方位角确定方法,包括:
[0106]
步骤s101:基于地球重力场模型计算重力东向梯度。
[0107]
局部北东地坐标假设条件下(x轴指向北方向,y轴指向东方向,z轴为重力方向),水准面上任意一点p的重力东向梯度可表示为
[0108][0109]
式中,gy表示重力北向梯度;g为重力。
[0110]gy
与重力位关系为
[0111][0112]
式中,w为重力位。
[0113]
重力位等于相应引力位和离心力之和,即
[0114]
w=v q (3)
[0115]
式中,v和q分别表示引力位和离心力位。地心球坐标系条件下,v和q的表达式分别为:
[0116][0117]
式中,ρ为研究点地心向径;θ和λ分别表示研究点地心余纬和地心经度;gm为地心引力常数;n和m分别代表球谐系数的阶与次,nmax表示球谐级数最高阶数;a表示椭球长半轴;和表示完全正常化球谐系数(通过重力场模型得到);为n阶m次完全正常化缔合勒让德函数;ω表示地球自转角速度。
[0118]
最终,局部指北坐标系下地球引力梯度v
yz
可表示为
[0119][0120]
其中
[0121][0122]
其中,完全正常化缔合勒让德函数递推式为
[0123][0124]
完全正常化缔合勒让德函数初始值为
[0125][0126]
研究点离心力梯度在局部指北坐标系下表示为
[0127]qyz
=0 (9)
[0128]
进而得到w
yz
=v
yz
q
yz
;
[0129]
最终基于w
yz
、公式(2)得到局部北东地坐标系条件下,水准面上任意一点p的重力东向梯度。
[0130]
步骤s102:基于重力场模型计算重力北向梯度。
[0131]
局部北东地坐标假设条件下,水准面上任意一点p的重力北向梯度可表示为
[0132][0133]
式中,g
x
为重力北向梯度;其余参数意义同上。
[0134]gx
与重力位关系为
[0135][0136]
式中参数意义同上。其中,重力位二阶梯度
[0137]wxz
=v
xz
q
xz (12)
[0138]
其中
[0139][0140]
式中,
[0141][0142]
研究点离心力梯度在局部指北坐标系下表示为
[0143][0144]
其中,
[0145][0146]
式中参数意义同上。
[0147]
步骤s103:计算重力线密切方位角。
[0148]
设重力线曲率矢量与北方向(x轴)夹角为α,即为重力线密切方位角,其与重力水平梯度相关,即
[0149]
[0150]
式中,参数意义同上。
[0151]
最终重力线密切方位角α为
[0152][0153]
利用步骤s101获取的重力东向梯度和步骤s102获取的重力北向梯度为输入,则利用(18)式可求得α,从而可以得出辅助仪器整平的密切方位角调节参数。
[0154]
作为一种具体可实施方式,以eigen6c4地球重力场模型为计算输入,分别计算重力东向梯度、重力北向梯度,进而获取重力线任意点处的密切方位角。
[0155]
步骤一,利用eigen6c4重力场模型计算全球5
′×5′
分辨率的重力东向梯度,结果如图2所示,计算地心球坐标时忽略实际地形起伏的影响。
[0156]
步骤二,利用eigen6c4重力场模型计算全球5
′×5′
分辨率的重力北向梯度,结果如图3所示,计算地心球坐标时忽略实际地形起伏的影响。
[0157]
步骤三,利用步骤一计算获得的全球5
′×5′
分辨率的重力东向梯度和步骤二得到的全球5
′×5′
分辨率的重力北向梯度,计算得到全球5
′×5′
分辨率的重力线密切方位角,结果如图4所示。
[0158]
图4显示全球范围重力线密切方位角最大值接近180
°
,平均值和标准差分别为90
°
和59
°
左右。同时,重力线密切方位角随点位不同而不同,并非为一定值。也就是说,仪器整平完成后,仪器中心处重力线密切方位角唯一确定。换言之,仪器中心处重力线密切方位角的确定可为仪器整平提供经验参考。另外,以5
′×5′
格网大小为参考,全球约49.86%的区域密切方位角小于90
°
,即全球重力线凹向北和凹向南的区域面积占比各半。
[0159]
在上述实施例的基础上,如图5所示,本发明另一方面提出一种辅助仪器整平的重力线密切方位角确定装置,包括:
[0160]
重力东向梯度计算模块,用于基于地球重力场模型计算重力东向梯度;
[0161]
重力北向梯度计算模块,用于基于重力场模型计算重力北向梯度;
[0162]
重力线密切方位角计算模块,用于基于得出的重力东向梯度及重力北向梯度计算重力线密切方位角。
[0163]
进一步地,所述重力东向梯度计算模块具体用于:
[0164]
局部北东地坐标系条件下,水准面上任意一点p的重力东向梯度表示为
[0165][0166]
式中,gy表示重力北向梯度;g为重力;
[0167]gy
与重力位关系为
[0168][0169]
式中,w为重力位,重力位等于相应引力位和离心力之和,即
[0170]
w=v q (3)
[0171]
式中,v和q分别表示引力位和离心力位,地心球坐标系条件下,v和q的表达式分别为:
[0172][0173]
式中,ρ为研究点地心向径;θ和λ分别表示研究点地心余纬和地心经度;gm为地心引力常数;n和m分别代表球谐系数的阶与次,nmax表示球谐系数最高阶数;a表示椭球长半轴;和表示完全正常化球谐系数;为n阶m次完全正常化缔合勒让德函数;ω表示地球自转角速度;
[0174]
最终,局部指北坐标系下地球引力梯度v
yz
可表示为
[0175][0176]
其中
[0177][0178]
其中,完全正常化缔合勒让德函数递推式为
[0179][0180]
研究点离心力梯度在局部指北坐标系下表示为
[0181]qyz
=0 (9)
[0182]
进而得到w
yz
=v
yz
q
yz
;
[0183]
最终基于w
yz
、公式(2)得到局部北东地坐标系条件下,水准面上任意一点p的重力东向梯度。
[0184]
进一步地,所述重力北向梯度计算模块具体用于:
[0185]
局部北东地坐标系条件下,水准面上任意一点p的重力北向梯度表示为
[0186][0187]
式中,g
x
为重力北向梯度;
[0188]gx
与重力位关系为
[0189][0190]
其中,重力位二阶梯度
[0191]wxz
=v
xz
q
xz (12)
[0192]
其中
[0193][0194]
式中,
[0195][0196]
研究点离心力梯度在局部指北坐标系下表示为
[0197][0198]
其中,
[0199][0200]
进一步地,所述重力线密切方位角计算模块具体用于:
[0201]
重力线曲率矢量与北方向夹角、即重力线密切方位角为α条件下,其与重力水平梯度相关,即
[0202][0203]
最终重力线密切方位角α为
[0204][0205]
综上,本发明利用重力线密切方位角与水准面间联系,提出一种辅助仪器整平的重力线密切方位角确定方法及装置,通过地球重力场模型计算重力线密切方位角,描述全球重力线密切方位角分布特征,从而可以给出辅助仪器整平的密切方位角调节参数,本发明可以定量刻画和描述仪器整平时重力线密切方位角参量,为提升仪器测量工作准备效率提供理论技术依据。
[0206]
以上所示仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。