1.本发明涉及旋转电机装置。
背景技术:
2.作为可变速用电动机,接受直流电压的供给产生转矩来进行旋转的直流电动机已经普及。但是,直流电动机在原理上由于电刷的磨损从而在维护性上存在问题,而且随着能够产生可变振幅
·
可变频率的交流电压的逆变器的普及,作为可变速用电动机,交流电动机逐渐普及。作为交流电动机,最先普及的是感应电动机,尤其是其转子由芯体及短路环(二次导体)构成且形成为笼形的笼型感应电动机更为普及。此外,近年来,使用永磁体的永磁体同步电动机也逐渐普及。
3.作为交流电动机而普及的感应电动机及永磁体同步电动机,大多采用被称为“矢量控制”的技术进行控制。该矢量控制中,在与交流电动机转子同步旋转的dq轴的旋转坐标系上控制电流。因此,在矢量控制中,通过控制电流矢量的q轴分量即q轴电流,控制交流电动机的转矩,实现与直流电动机同等的转矩的响应性。
4.交流电动机的转子有时设有偏转。实施偏转的目的在于减少由交流电动机产生的转矩的纹波分量(转矩的纹波分量在永磁体同步电动机中还包括齿槽转矩)。首先,在笼型感应电动机中,在轴向的各位置处设置有使得转子的短路环(二次导体)的周向上的位置连续地偏移的偏转。另一方面,在永磁体同步电动机中,如专利文献1的图2和图5所示那样,转子的永磁体中,在轴向的阶段的或连续的各位置处设置有使磁极位置向周向偏移的偏转。
5.其次,对设有偏转的交流电动机的矢量控制进行论述。在笼型感应电动机中,不依赖于是否设有偏转。这是因为,感应电动机在原理上是通过向定子线圈通过电流来使转子产生磁通,因此“转子的磁通方向可以通过在控制装置想要获得的方向上通过电流来获得”。现有技术文献专利文献
6.专利文献1:日本专利特开2000-308286号公报
技术实现要素:
发明所要解决的技术问题
7.但是,在永磁体同步电动机中,转子的磁通是由转子的磁极确定的。因此,不能通过控制装置使转子的磁通方向自由改变。这里,当永磁体同步电动机的转子的永磁体没有设置偏转时,在轴向的各位置,磁极的周向位置是相同的,因此将其磁极位置的方向确定在d轴上进行矢量控制即可。
8.但是,当永磁体同步电动机的转子的永磁体设有偏转时,在轴向的各位置,磁极的周向位置发生变化。因此,在dq轴的旋转坐标系中进行电流控制时,如何设定与d轴对应的磁极位置就成为问题。特别是,为了降低转矩的纹波分量而设置了偏转,但是为了有效地减
少转矩的纹波分量,如何设定与d轴对应的磁极位置来进行矢量控制才好,至今还不清楚。
9.因此,本技术提供一种旋转电机装置,使用在转子的永磁体中在轴向的各位置处设置有使磁极位置在周向上偏移的偏转的旋转电机,从而能够进行电流控制,以有效地减少转矩的纹波分量。用于解决技术问题的技术手段
10.本发明所涉及的旋转电机装置包括:旋转电机,该旋转电机具有设有永磁体的转子和设有多相绕组的定子;逆变器,该逆变器具有多个开关元件,用于对从直流电源提供的直流电和提供给所述多相绕组的交流电进行转换;电流检测部,该电流检测部对流过所述多相绕组的电流进行检测;旋转检测部,该旋转检测部检测所述转子的旋转角度;电流控制部,该电流控制部基于所述旋转角度的检测值设定控制用的磁极位置,计算控制用的电流指令值,并基于电流的检测值、所述控制用的电流指令值和所述控制用的磁极位置计算电压指令值;以及开关控制部,该开关控制部基于所述电压指令值,进行所述多个开关元件的导通关断控制,所述永磁体在轴向的各位置处设置使磁极位置在轴向上偏移的偏转,所述电流控制部进行下述控制:将在最提前相位的dq轴的旋转坐标系上计算的电流指令值的电流矢量设为最提前相位的电流矢量,该最提前相位的dq轴的旋转坐标系由轴向的各位置的磁极位置内、在旋转方向上相位最提前的磁极位置的方向上确定的d轴、以及在相比于该d轴在电角度上相位提前90
°
的方向上确定的q轴构成,将在中间相位的dq轴的旋转坐标系上计算的电流指令值的电流矢量设为中间相位的电流矢量,该中间相位的dq轴的旋转坐标系由轴向的各位置的磁极位置内、在旋转方向上相位最提前的磁极位置与相位最延迟的磁极位置的中间相位的方向上确定的d轴、以及在相比于该d轴在电角度上相位提前90
°
的方向上确定的q轴构成,随着流过所述多个绕组的绕组电流增加,使所控制的电流矢量从所述中间相位的电流矢量接近所述最提前相位的电流矢量。发明效果
11.若在最提前相位的dq轴的旋转坐标系表示绕组电流的d轴电流向正方向增加,则与最提前相位的磁极位置相对的定子部分产生磁饱和,虽然d轴的交链磁通增加,但斜率减少。若产生这种磁饱和时,则转矩纹波分量增加。因此,当绕组电流较大时,为了抑制最提前相位的d轴电流向正方向增加,需要使所控制的电流矢量接近最提前相位的电流矢量。另一方面,当绕组电流较小时,由于磁饱和的影响较小,因此,如果所控制的电流矢量接近中间相位的电流矢量,则可以抵消由最提前相位的磁极产生的转矩纹波分量和由最延迟相位的磁极产生的转矩纹波分量,从而能够减少转矩纹波分量。
12.根据本技术所涉及的旋转电机装置,随着绕组电流增加,所控制的电流矢量从中间相位的电流矢量接近最提前相位的电流矢量,因此,当绕组电流小时,可以抵消由最提前相位的磁极产生的转矩纹波分量和由最延迟相位的磁极产生的转矩纹波分量,从而减少转
矩纹波分量,即使绕组电流增加,也可以抑制最提前相位的d轴电流增加到产生磁饱和为止,从而能够减少转矩纹波分量。因此,可以根据绕组电流的增减,适当地改变电流矢量相对于在周向上偏移的磁极位置的相位,有效地减少转矩纹波分量。
附图说明
13.图1是实施方式1所涉及的旋转电机装置的简要结构图。图2是实施方式1所涉及的转子的立体图。图3是实施方式1所涉及的转子的剖视图。图4是实施方式1所涉及的转子和定子的剖视图。图5是实施方式1所涉及的控制装置的硬件结构图。图6是说明实施方式1所涉及的坐标系的图。图7是实施方式1所涉及的转矩纹波的特性图。图8是说明实施方式1所涉及的d2轴电流的正方向增加的图。图9是说明实施方式1所涉及的d2轴电流的增加所引起的磁饱和的图。图10是说明实施方式1所涉及的id=0控制时的电流矢量的控制的图。图11是说明实施方式1所涉及的与电流相对应的磁极位置的校正量的设定的图。图12是说明实施方式1所涉及的开关控制的时序图。图13是说明实施方式2所涉及的电流矢量的控制的图。图14是说明实施方式2所涉及的与电流相对应的d轴电流减少量的设定的图。图15是说明实施方式2所涉及的上限电流值附近的电流矢量的控制的图。图16是说明实施方式3所涉及的一侧的旋转方向时的坐标系的图。图17是说明实施方式3所涉及的另一侧的旋转方向时的坐标系的图。图18是说明实施方式3所涉及的另一侧的旋转方向时的其他示例的坐标系的图。图19是说明实施方式3所涉及的电动助力转向装置的图。图20是实施方式4所涉及的转子的立体图。图21是说明实施方式4所涉及的基于最大转矩电流控制的电流指令值的设定的图。图22是说明实施方式4所涉及的最大转矩电流控制时的电流矢量的控制的图。图23是说明实施方式5所涉及的弱磁通控制的执行区域的图。图24是说明另一实施方式所涉及的与电流相对应的磁极位置的校正量的设定的图。图25是另一实施方式所涉及的转子的立体图。图26是另一实施方式所涉及的转子的立体图。图27是另一实施方式所涉及的转子的展开图。图28是另一实施方式所涉及的转子的展开图。
具体实施方式
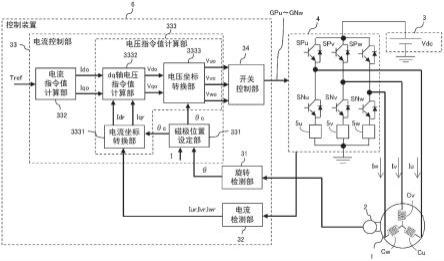
14.1.实施方式1参照附图说明实施方式1所涉及的旋转电机装置。图1是本实施方式所涉及的旋转
电机装置的简要结构图。旋转电机装置包括旋转电机1、逆变器4和控制装置6。
15.1-1.旋转电机1旋转电机1是永磁体同步电动机,具有设置有永磁体111的转子11和设置有多相绕组的定子21。作为多相绕组,设有u相、v相和w相三相绕组cu、cv和cw。三相绕组可以是星形接线或三角形接线。
16.转子11设置有用于检测转子11的旋转角度的旋转检测器2。旋转检测器2使用旋转变压器,编码器,mr传感器等。旋转检测器2的输出信号被输入到控制装置6。
17.如图2所示,永磁体111设置在转子11的表面,设为表面磁体型同步电动机。转子11设置有圆柱形的转子铁芯110,永磁体111粘附在转子铁芯110的外周面。
18.《偏转》永磁体111中,在轴向x的各位置处设置有使磁极位置在周向上偏移的偏转。本实施方式中,如图2和图3所示,永磁体111在轴向x上以两个阶段的方式设置有使磁极位置在周向上偏移的偏转。第一偏转段112a设置在转子11的轴向的一侧x1,第二偏转段112b设置在轴向的另一侧x2。图2是转子11的立体图,图3的左侧是第一偏转段112a的剖视图,图3的右侧是第二偏转段112b的剖视图。八个磁极111(四个n极和四个s极)沿周向等间隔地配置在第一和第二偏转段112a和112b各自的外周部。n极和s极在周向上交替配置。
19.第二偏转段112b的磁极111(例如,n极)和第一偏转段112a的磁极111(例如,n极)在周向上偏移。在本例中,第二偏转段112b的磁极111在旋转方向r上相对于第一偏转段112a的磁极111在电角度下偏移30度,在机械角下偏移7.5度。因此,在本实施方式中,磁极位置在周向上的偏移角度即偏转角θe在电角度下为30度,在机械角下为7.5度。电角度是机械角乘以极对数(本例中为4)而得到的角度。极对数为磁极数的二分之一。
20.图4是转子11和定子21的剖视图。卷绕有三相绕组211的定子的槽212的数量是12。因此,旋转电机1是磁极数为8和槽数为12的表面磁体型永磁体同步电动机。
21.1-2.逆变器4逆变器4是用于转换从直流电源3提供的直流电和提供给三相绕组的交流电的功率转换器,并且具有多个开关元件。逆变器4与三相各相相对应地设置有3组串联电路(腿),该串联电路由与直流电源3的正极侧相连接的正极侧开关元件sp以及与直流电源3的负极侧相连接的负极侧开关元件sn串联连接而成。接着,各相的串联电路中的两个开关元件的连接点连接到相应相的绕组。
22.具体地说,在u相的串联电路中,u相的正极侧开关元件spu与u相的负极侧开关元件snu串联连接,两个开关元件的连接点与u相的绕组cu连接。在v相的串联电路中,v相的正极侧开关元件spv与v相的负极侧开关元件snv串联连接,两个开关元件的连接点与v相的绕组cv连接。在w相的串联电路中,w的正极侧开关元件spw和w相的负极侧开关元件snw串联连接,两个开关元件的连接点与w相的绕组cw连接。
23.开关元件使用反向并联连接有二极管的igbt(insulated gate bipolar transistor:绝缘栅双极晶体管)、mosfet(metal oxide semiconductor field effect transistor:金属氧化物半导体场效应晶体管)、反向并联连接有二极管的双极晶体管等。各开关元件的栅极端子经由栅极驱动电路等连接到控制装置6。各开关元件通过从控制装置6输出的开关信号gpu-gnw进行导通或关断。
24.直流电源3向逆变器4输出直流电压vdc。作为直流电源3,只要是电池、dc-dc转换器、二极管整流器、pwm整流器等输出电源电压vdc的设备,则可以是任意设备。直流电源3设置有用于检测电源电压vdc的电压传感器,并且电压传感器的输出信号可以输入到控制装置6。控制装置6可以使用检测到的电源电压vdc进行控制。
25.电流检测器5是用于检测流过三相绕组的电流的电路。在本实施方式中,电流检测器5设置在三相各相的两个开关元件的串联电路。电流检测器5具有串联连接到各相的负极侧开关元件的负极侧的分流电阻5u,5v,5w。u相的分流电阻5u串联连接到u相的负极侧开关元件snu的负极侧,v相的分流电阻5v串联连接到v相的负极侧开关元件snv的负极侧,w相的分流电阻5w串联连接到w相的负极侧开关元件snw的负极侧。各相的分流电阻5u,5v,5w的两端电位差输入到控制装置6。另外,电流检测器5可以设置在连接各相的两个开关元件的串联电路和各相的绕组的电线上。此外,电流检测器5可以构成为检测任意两相的电流。在这种情况下,利用三相绕组电流的总和为零,控制装置6可以基于两相电流检测值计算剩余一相的电流。例如,电流检测器5检测u相和v相的电流iur、ivr,控制装置6可以通过iwr=-iur-ivr计算w相的电流iwr。
26.1-3.控制装置6控制装置6通过逆变器4来控制旋转电机1。如图1所示,控制装置6包括旋转检测部31、电流检测部32、电流控制部33、开关控制部34等。控制装置6的各功能由控制装置6所具备的处理电路来实现。具体而言,控制装置6如图5所示,具备下述部分来作为处理电路,即:cpu(central processing unit:中央处理器)等运算处理装置90(计算机)、与运算处理装置90间进行数据的交换的存储装置91、向运算处理装置90输入外部信号的输入电路92、以及从运算处理装置90向外部输出信号的输出电路93等。
27.作为运算处理装置90,可以设置asic(application specific integrated circuit:专用集成电路)、ic(integrated circuit:集成电路)、dsp(digital signal processor:数字信号处理器)、fpga(field programmable gate array:现场可编程门阵列)、各种逻辑电路和各种信号处理电路等。另外,作为运算处理装置90,也可以设置多个同种或不同种的运算处理装置来分担执行各处理。作为存储装置91,可以设置构成为能从运算处理装置90读取数据并向运算处理装置90写入数据的ram(random access memory:随机存取存储器)、构成为能从运算处理装置90读取数据的rom(read only memory:只读存储器)等。输入电路92连接有旋转检测器2、电流检测器5等各种传感器和开关,并且包括将这些传感器和开关的输出信号输入到运算处理装置90的a/d转换器等。输出电路93连接有对开关元件进行导通关断驱动的栅极驱动电路等电负载,并具备从运算处理装置90向这些电负载输出控制信号的驱动电路等。
28.控制装置6所具备的图1的各控制部31~34等的各种功能是通过运算处理装置90执行存储在rom等存储装置91中的软件(程序)并与存储装置91、输入电路92和输出电路93等控制装置6的其他硬件协作来实现的。另外,将各控制部31~34等所使用的设定数据作为软件(程序)的一部分存储于rom等存储装置91。以下,对控制装置6的各功能进行详细说明。
29.旋转检测部31检测转子的旋转角度和旋转角速度。在本实施方式中,旋转检测部31基于旋转检测器2的输出信号检测转子的旋转角度θ和旋转角速度ω。
30.电流检测部32基于电流检测器5的输出信号检测流过三相绕组的电流iur,ivr和
iwr。在本实施方式中,电流检测部32将各相的分流电阻的两端电位差除以分流电阻的电阻值,从而检测各相绕组的电流iur、ivr和iwr。
31.在本实施方式中,电流控制部33包括磁极位置设定部331,电流指令值计算部332和电压指令值计算部333。磁极位置设定部331基于由旋转检测部31检测出的旋转角度θ设定控制用磁极位置θc。电流指令值计算部332计算控制用电流指令值。电压指令值计算部333基于电流检测值、控制用电流指令值和控制用磁极位置θc来计算电压指令值。
32.《dq轴的旋转坐标系上的电流控制》电流控制部33在dq轴的旋转坐标系上控制电流。dq轴的旋转坐标系由在磁极位置(n极的位置)方向上确定的d轴,以及在相位比d轴提前电角度90
°
的方向上确定的q轴构成。
33.如使用图3所说明的那样,相对于第一偏转段112a的磁极位置,第二偏转段112b的磁极位置在旋转方向r上在电角度下相位提前偏转角θe(本例中为30度)。因此,如何设定dq轴的旋转坐标系的磁极位置成为问题。
34.例如,如图6所示,以在旋转方向r上相位提前最多的第二偏转段112b的磁极位置θ2为基准而设定的最提前相位的dq轴的旋转坐标系由在第二偏转段112b的磁极位置θ2的方向上设定的d轴(下面称为d2轴)和在相比于d2轴在电角度下相位提前90
°
的方向上设定的q轴(下面称为q2轴)构成。
35.以在旋转方向r上相位最延迟的第一偏转段112a的磁极位置θ1为基准而设定的最延迟相位的dq轴的旋转坐标系由在第一偏转段112a的磁极位置θ1的方向上设定的d轴(以下称为d1轴)和在相比于d1轴在电角度下相位提前90
°
的方向上设定的q轴(以下称为q1轴)构成。
36.另外,在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系由在控制用磁极位置θc的方向上设定的d轴(以下称为dc轴)和在相比于dc轴在电角度下相位提前90
°
的方向上设定的q轴(以下称为qc轴)构成。
37.各磁极位置θ2、θ1、θc是以设定在三相绕组的位置的三相静止坐标轴(u轴、v轴、w轴)的u轴(u相绕组位置)为基准的电角度下的磁极的旋转角度。
38.《控制用的磁极位置θc的相位引起的6阶转矩纹波分量的变化》在本实施方式中,如后述那样通过id=0控制计算电流指令值。d轴的电流指令值ido被设定为零(ido=0),q轴的电流指令值iqo被设定为与转矩指令值tref对应的值。因此,电流矢量与控制用dq轴的旋转坐标系的qc轴一致。
39.图7示出控制用磁极位置θc相对于最延迟相位的磁极位置θ1的相位超前α(=θc-θ1)和电角度6阶转矩纹波分量的特性图的示例。图7示出绝对值不同的4个电流矢量各自的特性(等电流曲线)。α=0时,控制用磁极位置θc与最延迟相位的磁极位置θ1一致,电流矢量的方向与q1轴向一致。α=θe时,控制用磁极位置θc与最提前相位的磁极位置θ2一致,电流矢量的方向与q2轴向一致。α=θe/2时,控制用磁极位置θc与最提前相位的磁极位置θ2和最延迟相位的磁极位置θ1之间的中间相位的磁极位置θave一致,电流矢量的方向与q2轴和q1轴的中间相位的方向一致。
40.当电流矢量绝对值较小时,6阶转矩纹波分量变为最小的相位提前α为偏转角θe/2。当α=θe/2时,控制用磁极位置θc成为最提前相位的磁极位置θ2和最延迟位相的磁极位置θ1之间的中间相位。这是因为在中间相位上,由第二偏转段112b的磁极产生的6阶转矩纹
波分量与由第一偏转段112a的磁极产生的6阶转矩纹波分量相互抵消。
41.另一方面,随着电流矢量的绝对值增加,6阶转矩纹波分量变为最小的相位提前α逐渐接近偏转角θe。这是由于以下说明的磁饱和的产生而产生的。如图8及下式所示,若设定为α=θe/2时,随着电流矢量的绝对值|i|增大,电流矢量i的d2轴的分量id2(也称为d2轴电流id2)向正方向增加,电流矢量i的d1轴的分量id1(也称为d1轴电流id1)向负方向增加。id2=|i|
×
cos(π/2-θe α)id1=-|i|
×
cos(π/2-α)
···
(1)
42.图9示出d2轴的交链磁通φd2相对于d2轴电流id2的特性。d2轴电流id2=0时产生的d2轴的交链磁通φd2是由第二偏转段112b的磁极产生的磁通。若使d2轴电流id2从0开始减少,则由于是弱磁通的方向,因此d2轴的交链磁通φd2以与规定的d轴电感ld相应的斜率,与d2轴电流id2成比例地减少。
43.另一方面,若使d2轴电流id2从0开始增加,则虽然d2轴的交链磁通φd2增加,但斜率减少。这是因为在与第二偏转段112b的磁极相对的定子的齿部分发生磁饱和,d轴电感ld减少。若产生该磁饱和,则6阶转矩纹波分量增大。即使电流矢量的绝对值|i|增加,如果d2轴电流id2能够维持在0附近,则可以抑制磁饱和的产生,抑制6阶转矩纹波分量的产生。为了使d2轴电流id2维持在0附近,随着电流矢量的绝对值|i|增加,需要使相位提前α从偏转角θe/2变为偏转角θe。
44.由于该磁饱和的发生,6阶的转矩纹波分量变为最小的相位提前α随着电流矢量绝对值增加而从偏转角θe/2移动到偏转角θe。因此,随着电流矢量的绝对值|i|增加,控制用磁极位置θc相对于最延迟相位的磁极位置θ1的相位提前α从与最延迟相位的磁极位置θ1和最提前相位的磁极位置θ2的中间相位对应的偏转角θe/2向与最提前相位的磁极位置θ2对应的偏转角θe接近即可。
45.另外,由于磁饱和的特性随定子的齿和绕组的设计而变化,因此在对于d轴电流的增加难以磁饱和的旋转电机的情况下,即使相位提前α不增加到偏转角θe,也可以使6阶转矩纹波分量最小化。
46.《与电流对应的控制用电流矢量的相位变化》因此,电流控制部33将在最提前相位的dq轴的旋转坐标系上计算出的电流指令值的电流矢量设为最提前相位的电流矢量iadv,将在中间相位的dq轴的旋转坐标系上计算出的电流指令值的电流矢量设为中间相位的电流矢量iave,并且如图10所示,随着流过三相绕组的绕组电流增加,使所控制的电流矢量ic从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。
47.这里,最提前相位的dq轴的旋转坐标系是由在旋转方向r上相位最提前的第二偏转段112b的磁极位置θ2的方向上确定的d2轴和在相比于d2轴相位提前电角度90
°
的方向上确定的q2轴构成的dq轴的旋转坐标系。中间相位的dq轴的旋转坐标系是由d轴(以下称为dave轴)和q轴(以下称为qave轴)构成的dq轴的旋转坐标系,其中,d轴确定为在旋转方向r上相位最提前的第二偏转段112b的磁极位置θ2和相位最延迟的第一偏转段112a的磁极位置θ1之间的中间相位的方向,q轴确定为相比于该dave轴相位提前电角度90
°
的方向。
48.根据该结构,随着绕组电流(电流矢量的绝对值)增加,所控制的电流矢量ic从中间相位的电流矢量iave向于最提前相位的电流矢量iadv接近,因此,当绕组电流较小时,可
以抵消由最提前相位的磁极产生的转矩纹波分量和由最延迟相位的磁极产生的转矩纹波分量,从而减少6阶转矩纹波分量,即使绕组电流增加,也可以抑制最提前相位的d2轴电流id2增加到产生磁饱和为止,从而减少6阶转矩纹波分量。因此,可以根据绕组电流的增减,适当地改变电流矢量相对于沿周向偏移的磁极位置的相位,有效地减少6阶转矩纹波分量。
49.如图10所示,电流控制部33将在最提前相位的dq轴的旋转坐标系上通过id=0控制计算出的电流指令值的电流矢量设为最提前相位的电流矢量iadv,将在中间相位的dq轴的旋转坐标系上通过id=0控制计算出的电流指令值的电流矢量设为中间相位的电流矢量iave,并且随着流过三相绕组的绕组电流增加,使所控制的电流矢量ic从中间相位的电流矢量iave向于最提前相位的电流矢量iadv接近。
50.根据该结构,最提前相位的电流矢量iadv成为最提前相位的dq轴的旋转坐标系的q2轴向的电流矢量,中间相位的电流矢量iave成为中间相位的dq轴的旋转坐标系的qave轴向的电流矢量。并且,随着绕组电流增加,能够使所控制的电流矢量从中间相位的dq轴的旋转坐标系的qave轴向的电流矢量向最提前相位的dq轴的旋转坐标系的q2轴向的电流矢量接近。可以抑制以最提前相位的dq轴的旋转坐标系表示电流的d2轴电流id2的增加,抑制电角度6阶转矩纹波分量的增加。
51.《与电流对应的控制用的磁极位置的变化》在本实施方式中,磁极位置设定部331随着绕组电流增加,使控制用磁极位置θc从磁极位置θave向在旋转方向r上相位最提前的磁极位置θ2的方向接近,该磁极位置θave是在旋转方向r上相位最提前的第二偏转段112b的磁极位置θ2和在旋转方向r上相位最延迟的第一偏转段112a的磁极位置θ1之间的中间相位的磁极位置。然后,电流指令值计算部332在以控制用的磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上计算控制用电流指令值。然后,电压指令值计算部333在以控制用的磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。
52.根据该结构,随着绕组电流增加,使控制用磁极位置θc从中间相位的磁极位置向最提前相位的磁极位置θ2接近,从而使得控制用电流指令值的电流矢量ic和所控制的电流矢量ic可以从在中间相位的dq轴的旋转坐标系上计算出的中间相位的电流矢量iave向在最提前相位的dq轴的旋转坐标系上计算出的最提前相位的电流矢量iadv接近。
53.《磁极位置设定部331》如上所述,磁极位置设定部331随着绕组电流增加,使控制用磁极位置θc从最提前相位的磁极位置θ2和最延迟相位的磁极位置θ2之间的中间相位的磁极位置θave向最提前相位的磁极位置θ2的方向接近。
54.例如,磁极位置设定部331参照图11所示的预先设定了绕组电流|i|和磁极位置的校正量δθ之间的关系的校正量设定数据,计算对应于当前的绕组电流|i|的磁极位置的校正量δθ。然后,磁极位置设定部331如下式所示,基于由旋转检测部31检测到的旋转角度θ设定基准磁极位置θ0。然后,磁极位置设定部331通过将校正量δθ与基准磁极位置θ0相加来计算控制用磁极位置θc。例如,如果中间相位的磁极位置θave被设定为基准磁极位置θ0,则磁极位置的校正量δθ被设定为随着绕组电流|i|增加而从0向偏转角θe/2接近。θc=θ0 δθ
···
(2)θ0=θave
55.磁极位置设定部331如下式所示,基于控制用d轴电流指令值ido和控制用q轴电流指令值iqo来计算电流矢量的绝对值,以作为绕组电流|i|。另外,通过id=0控制,ido=0,因此绕组电流|i|与q轴电流指令值iqo成比例。可以使用d轴电流检测值idr和q轴电流检测值iqr来代替控制用d轴电流指令值ido和控制用q轴电流指令值iqo。|i|=√(ido2 iqo2)=iqo
···
(3)
56.《电流指令值计算部332》电流指令值计算部332在控制用dq轴的旋转坐标系上通过id=0控制来计算控制用d轴电流指令值ido和控制用q轴电流指令值iqo。例如,电流指令值计算部332如下式所示,将控制用d轴电流指令值ido设定为0,将控制用q轴电流指令值iqo设定为将转矩指令值tref乘以转换系数kt而得到的值。转矩指令值tref可以在控制装置6内计算,也可以从外部控制装置传送。ido=0iqo=kt
×
tref
···
(4)
57.《电压指令值计算部333》电压指令值计算部333基于电流检测值、控制用电流指令值和控制用磁极位置θc计算电压指令值。在本实施方式中,电压指令值计算部333在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。如图1所示,电压指令值计算部333包括电流坐标转换部3331、dq轴电压指令值计算部3332和电压坐标转换部3333。
58.电流坐标转换部3331将电流检测部32检测的三相绕组的电流检测值iur、ivr和iwr转换为以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上的d轴电流检测值idr和q轴电流检测值iqr。d轴确定为控制用磁极位置θc的方向,q轴确定为从d轴以电角度前进90
°
相位的方向。具体地说,电流坐标转换部3331如下式所示,基于控制用磁极位置θc对三相电流检测值iur、ivr和iwr进行三相两相转换和旋转坐标转换,从而将其转换为d轴电流检测值idr和q轴电流检测值iqr。[数学式1]数1
[0059]
dq轴电压指令值计算部3332进行电流反馈控制,该电流反馈控制中,通过pi控制等改变d轴电压指令值vdo和q轴电压指令值vqo,使得d轴电流检测值idr接近控制用d轴电流指令值ido,q轴电流检测值iqr接近控制用q轴电流指令值iqo。另外,也可以进行用于实现d轴电流与q轴电流的非干涉化等的前馈控制。
[0060]
电压坐标转换部3333基于控制用磁极位置θc,对控制用dq轴的旋转坐标系上的d轴和q轴电压指令值vdo和vqo进行固定坐标转换和两相三相转换,以将其转换为三相电压指令值vuo、vvo和vwo。针对三相电压指令值,可以施加三次谐波注入调制等各种调制。[数学式2]数2
[0061]
《开关控制部34》开关控制部34基于电压指令值来进行多个开关元件的导通关断控制。在本实施方式中,开关控制部34通过比较三相电压指令值vuo、vvo和vwo中的每一个与以载波周期tc振动的载波ca,来进行开关元件的导通关断控制。载波ca是在载波周期tc下以0为中心且以电源电压的一半值vdc/2的振幅进行振动的三角波。电源电压vdc可以由电压传感器来检测。
[0062]
如图12所示,针对各相,开关控制部件34当载波ca低于电压指令值时,接通正极侧开关元件的开关信号gp(本例中为1),并接通正极侧开关元件,当载波ca高于电压指令值时,关断正极侧开关元件的开关信号gp(本例中为0),并关断正极侧开关元件。另一方面,针对各相,开关控制部件34当载波ca低于电压指令值时,关断负极侧开关元件的开关信号gn(本例中为0),关断负极侧开关元件,并关断负极侧开关元件,当载波ca高于电压指令值时,接通负极侧开关元件的开关信号gn(本例中为1),并导通负极侧开关元件。另外,针对各相,可以在正极侧开关元件的导通期间和负极侧开关元件的导通期间之间设置关断正极侧开关元件和负极侧开关元件这两者的短路防止期间(死区时间)。
[0063]
2.实施方式2对实施方式2所涉及的旋转电机装置进行说明。对与上述实施方式1相同的结构部分省略说明。本实施方式所涉及的旋转电机1、逆变器4以及控制装置6的基本结构与实施方式1相同,但控制装置6的处理与实施方式1不同。
[0064]
在本实施方式中,为了使由磁饱和引起的6阶转矩纹波分量的增加最小化,如图10所示,电流控制部33随着流过三相绕组的绕组电流增加,使控制用电流指令值的电流矢量ic从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。
[0065]
但是,在本实施方式中,实现方法与实施方式1不同。即,磁极位置设定部331检测旋转方向r上相位最提前的第二偏转段112b的磁极位置θ2和旋转方向r上相位最延迟的第一偏转段112a的磁极位置θ1之间的中间相位的磁极位置θave,作为控制用磁极位置θc。电流指令值计算部332在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上计算电流指令值,将该电流指令值的d轴分量减少d轴电流减少量δid,从而计算控制用电流指令值。电流指令值计算部332增加d轴电流减少量δid,使得控制用电流指令值的电流矢量ic随着绕组电流增加而从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。然后,电压指令值计算部333在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。
[0066]
根据该结构,随着绕组电流增加,通过减少在中间相位的dq轴的旋转坐标系上计算出的电流指令值的d轴分量,可以使控制用电流指令值的电流矢量ic从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。可以抑制以最提前相位的dq轴的旋转坐标系表示电流的d2轴电流id2的增加,抑制电角度6阶转矩纹波分量的增加。
[0067]
电流指令值计算部332在中间相位的dq轴的旋转坐标系上通过id=0控制来计算中间相位的d轴和q轴电流指令值idave和iqave。例如,电流指令值计算部332如下式所示,将中间相位的d轴电流指令值idave设定为0,并将中间相位的q轴电流指令值iqave设定为
将转矩指令值tref乘以转换系数kt而得到的值。idave=0iqave=kt
×
tref
···
(7)
[0068]
然后,电流指令值计算部332如图13和下式所示,通过使中间相位的d轴电流指令值idave减少d轴电流减少量δid,来计算控制用d轴电流指令值ido。另外,电流指令值计算部332将中间相位的q轴电流指令值iqave直接设定为控制用q轴电流指令值iqo。ido=idave-δidiqo=iqave
···
(8)
[0069]
电流指令值计算部332通过参照预先设定有绕组电流|i|和d轴电流减少量δid之间的关系的减少量设定数据,计算对应于当前的绕组电流|i|的d轴电流减少量δid。如图14所示,减少量设定数据被设定为随着绕组电流|i|增加,使d轴电流减少量δid增加,从而使得控制用电流指令值的电流矢量ic从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。另外,控制用电流指令值的电流矢量ic与最提前相位的电流矢量iadv一致的d轴电流减少量δid*如下式所示,随着绕组电流|i|增加,d轴电流减少量δid从0向δid*接近。δid*=tan(θe/2)
×
iqave
···
(9)
[0070]
如图13的示例所示,在中间相位的dq轴的旋转坐标系上,通过id=0控制计算出的中间相位的电流指令值的电流矢量iave与中间相位的dq轴的旋转坐标系的q轴即qave轴一致。通过使中间相位的电流指令值的d轴分量减少d轴电流减少量δid,可以使控制用电流指令值的电流矢量ic接近与q2轴一致的最提前相位的电流矢量iadv。
[0071]
电流指令值计算部332如下式所示,基于中间相位的d轴电流指令值idave和q轴电流指令值iqave,计算电流矢量的绝对值来作为绕组电流|i|。另外,通过id=0控制,idave=0,因此绕组电流|i|与q轴电流指令值iqave成比例。可以使用d轴电流检测值idr和q轴电流检测值iqr来代替中间相位的d轴电流指令值idave和q轴电流指令值iqave。|i|=√(idave2 iqave2)
···
(10)
[0072]
《由上限电流值引起的d轴分量的减少》旋转电机的转矩为最提前相位的磁极产生的转矩和最延迟位相磁极产生的转矩的平均,因此与中间相位的q轴电流成比例地变化。即,中间相位的q轴电流越大,则旋转电机的转矩越大。如图15所示的限流圆,能够流向绕组的电流有上限。如上所述,通过使中间相位的电流指令值的d轴分量减少d轴电流减少量δid,从而电流矢量的绝对值增加。另一方面,若电流矢量的绝对值达到上限电流值,则不能增加中间相位的q轴电流,不能使转矩增加d轴电流减少量δid。在旋转电机的要求性能中,增加最大转矩有时比减少6阶转矩纹波分量更为重要。
[0073]
因此,电流指令值计算部332当绕组电流|i|超过被设定为小于上限电流值imax的值而得的阈值ith时,随着绕组电流|i|接近上限电流值imax,使控制用电流指令值的电流矢量ic从最提前相位的电流矢量iadv向中间相位的电流矢量iave接近。在本实施方式中,如图14所示,电流指令值计算部332当绕组电流|i|(本例中为中间相位的q轴电流指令值iqave)超过阈值ith时,随着绕组电流|i|接近上限电流值imax而将d轴电流减少量δid减少到零。
[0074]
根据该结构,当绕组电流|i|接近上限电流值imax时,可以使控制用电流指令值的电流矢量ic从最提前相位的电流矢量iadv向中间相位的电流矢量iave接近,以减少6阶转矩纹波分量为代价,增加最大转矩。
[0075]
另外,相比于最大转矩的增加,在要求减少6阶转矩纹波分量的旋转电机中,也可以不进行本处理。
[0076]
3.实施方式3对实施方式3所涉及的旋转电机装置进行说明。省略与上述实施方式1或2相同的结构部分的说明。本实施方式所涉及的旋转电机1、逆变器4及控制装置6的基本结构与实施方式1或2相同,但旋转电机1能够向一侧及另一侧旋转,随之控制装置6的处理与实施方式1或2不同。
[0077]
在实施方式1及2中,是旋转电机1仅向一侧旋转的情况。然而,根据用途的不同,旋转电机1有时可以向一侧和另一侧旋转。因此,电流控制部33根据一侧和另一侧的旋转方向,设定在旋转方向上相位最提前的磁极位置和在旋转方向上相位最延迟的磁极位置。将与实施方式1的旋转方向r相同的旋转方向设为一侧的旋转方向r1,将与实施方式1的旋转方向r相反的旋转方向设为另一侧的旋转方向r2。
[0078]
如图16所示,与实施方式1同样,在旋转方向是一侧的旋转方向r1的情况下,最提前相位的dq轴的旋转坐标系是由在一侧的旋转方向r1上相位最提前的第二偏转段112b的磁极位置θ2的方向上确定的d2轴和在一侧的旋转方向r1上相比于d2轴相位提前电角度90
°
的方向上确定的q2轴构成的dq轴的旋转坐标系。中间相位的dq轴的旋转坐标系是由dave轴和qave轴构成的dq轴的旋转坐标系,其中,该dave轴确定为在一侧的旋转方向r1上相位最提前的第二偏转段112b的磁极位置θ2和在一侧的旋转方向r1上相位最延迟的第一偏转段112a的磁极位置θ1之间的中间相位的方向,该qave轴确定为相比于该dave轴相位提前电角度90
°
的方向。
[0079]
如图17所示,与实施方式1相反,在旋转方向是另一侧的旋转方向r2的情况下,最提前相位的dq轴的旋转坐标系是由在另一侧的旋转方向r2上相位最提前的第一偏转段112a的磁极位置θ1的方向上确定的d1轴和在另一侧的旋转方向r2上相比于d1轴相位提前电角度90
°
的方向上确定的q1轴构成的dq轴的旋转坐标系。中间相位的dq轴的旋转坐标系是由dave轴和qave轴构成的dq轴的旋转坐标系,其中,该dave轴确定为在另一侧的旋转方向r2上相位最提前的第一偏转段112a的磁极位置θ1和在另一侧的旋转方向r2上相位最延迟的第二偏转段112b的磁极位置θ2之间的中间相位的方向,该qave轴确定为在另一侧的旋转方向r2上相比于dave轴相位提前电角度90
°
的方向。
[0080]
并且,如上述那样,使用根据旋转方向设定的dq轴的旋转坐标系,与实施方式1或2同样,电流控制部33将在最提前相位的dq轴的旋转坐标系上计算出的电流指令值的电流矢量设为最提前相位的电流矢量iadv,将在中间相位的dq轴的旋转坐标系上计算出的电流指令值的电流矢量设为中间相位的电流矢量iave,随着流过三相绕组的绕组电流增加,使所控制的电流矢量从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。
[0081]
《使用与实施方式1相同的方法的情况》对使用与实施方式1相同的方法的情况进行说明。在是一侧的旋转方向r1的情况下,与实施方式1同样,磁极位置设定部331随着绕组电流增加,使控制用磁极位置θc从中间
相位的磁极位置θave向在一侧的旋转方向r1上相位最提前的第二偏转段112b的磁极位置θ2的方向接近。电流指令值计算部332在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上计算控制用电流指令值。然后,电压指令值计算部333在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。该情况下的控制用dq轴的旋转坐标系由控制用磁极位置θc的方向上确定的dc轴和在一侧的旋转方向r1上相比于dc轴相位提前电角度90
°
的方向上确定的qc轴构成。
[0082]
在是另一侧的旋转方向r2的情况下,磁极位置设定部331随着绕组电流增加,使控制用磁极位置θc从中间相位的磁极位置θave向在另一侧的旋转方向r2上相位最提前的第一偏转段112a的磁极位置θ1的方向接近。电流指令值计算部332在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上计算控制用电流指令值。在该情况下,与一侧的旋转方向r1的情况相同,q轴电流指令值iqo为正值。然后,电压指令值计算部333在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。该情况下的控制用dq轴的旋转坐标系由控制用磁极位置θc的方向上确定的dc轴和在另一侧的旋转方向r2上相比于dc轴相位提前电角度90的方向上确定的qc轴构成。
[0083]
《使用与实施方式2相同的方法的情况》接着,对使用与实施方式2相同的方法的情况进行说明。在是一侧的旋转方向r1的情况下,与实施方式1相同,磁极位置设定部331检测中间相位的磁极位置θave来作为控制用磁极位置θc。电流指令值计算部332在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上计算电流指令值,将该电流指令值的d轴分量减少d轴电流减少量δid,从而计算控制用电流指令值。电流指令值计算部332增加d轴电流减少量δid,使得控制用电流指令值的电流矢量ic随着绕组电流增加而从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。然后,电压指令值计算部333在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。该情况下的中间相位的dq轴的旋转坐标系由在中间相位的磁极位置θave的方向上确定的dave轴和在一侧的旋转方向r1上相比于dave轴相位提前电角度90的方向上确定的qave轴构成。
[0084]
在是另一侧的旋转方向r2的情况下,磁极位置设定部331检测中间相位的磁极位置θave来作为控制用磁极位置θc。电流指令值计算部332在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上计算电流指令值,将该电流指令值的d轴分量减少d轴电流减少量δid,从而计算控制用电流指令值。电流指令值计算部332增加d轴电流减少量δid,使得控制用电流指令值的电流矢量ic随着绕组电流增加而从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。在该情况下,与一侧的旋转方向r1的情况相同,q轴电流指令值iqo为正值,d轴电流指令值ido为负值。然后,电压指令值计算部333在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。该情况下的中间相位的dq轴的旋转坐标系由在中间相位的磁极位置θave的方向上确定的dave轴和在另一侧的旋转方向r2上相比于dave轴相位提前电角度90的方向上确定的qave轴构成。
[0085]
《另一侧的旋转方向的其他示例》
或者,如图18所示,在是另一侧的旋转方向r2的情况下,将最提前相位的dq轴的旋转坐标系设定为由在另一侧的旋转方向r2上相位最提前的第一偏转段112a的磁极位置θ1的方向上确定的d1轴和在一侧的旋转方向r1上相比于d1轴相位提前电角度90
°
的方向上确定的q1轴构成的dq轴的旋转坐标系。也可以将中间相位的dq轴的旋转坐标系设定为由dave轴和qave轴构成的dq轴的旋转坐标系,其中,该dave轴确定为在另一侧的旋转方向r2上相位最提前的第一偏转段112a的磁极位置θ1和在另一侧的旋转方向r2上相位最延迟的第二偏转段112b的磁极位置θ2之间的中间相位的方向,该qave轴确定为在一侧的旋转方向r1上相比于dave轴相位提前电角度90
°
的方向。在该情况下,q轴电流指令值iqo为正负符号反转后的负值。在这种情况下,实质上同等于上述结构。
[0086]
《电动助力转向装置》这种旋转电机用于例如图19所示那样的电动助力转向装置的驱动力源。电动助力转向装置包括:驾驶员用于左右旋转的方向盘63;连接到方向盘63并将方向盘63的转向转矩传递到车轮62的转向机构的轴64;安装在轴64上并检测方向盘63的转向转矩的转矩传感器65;以及将旋转电机1的驱动力传递到轴64的蜗轮机构等驱动力传递机构61。控制装置6构成为使旋转电机1输出与由转矩传感器65检测到的方向盘63的转向转矩相对应的转矩。因此,根据由转矩传感器65检测到的转向转矩来设定转矩指令值tref。
[0087]
当驾驶员将方向盘63向右侧旋转时,旋转电机1例如沿一侧的旋转方向r1旋转,并且控制装置6输出与转向转矩对应的一侧的旋转方向r1的转矩。当驾驶员将方向盘63向左侧旋转时,旋转电机1例如沿另一侧的旋转方向r2旋转,并且控制装置6输出与转向转矩对应的另一侧的旋转方向r2的转矩。
[0088]
4.实施方式4对实施方式4所涉及的旋转电机装置进行说明。省略与上述实施方式1或2相同的结构部分的说明。本实施方式所涉及的旋转电机1、逆变器4及控制装置6的基本结构与实施方式1或2相同,但永磁体嵌入转子内部,电流指令值的计算方法与实施方式1或2不同。
[0089]
在本实施方式中,如图20所示,永磁体161嵌入转子11的内部,被设为嵌入磁体型同步电动机。转子11设置有转子铁芯162,永磁体161嵌入转子铁芯162的内部。
[0090]
与实施方式1同样,永磁体161在轴向x上以两个阶段的方式设置有使磁极位置在周向上偏移的偏转。第一偏转段162a设置在转子的轴向的一侧x1,第二偏转段162b设置在轴向的另一侧x2。八个磁极161(四个n极和四个s极)沿周向等间隔地配置在第一和第二偏转段162a和162b各自的外周部。n极和s极在周向上交替配置。
[0091]
第二偏转段162b的磁极161(例如,n极)和第一偏转段162a的磁极161(例如,n极)在周向上偏移。在本例中,第二偏转段162b的磁极161在旋转方向r上相对于第一偏转段162a的161在电角度上偏移30度,偏转角θe在电角度下为30度。第二偏转段162b的磁极位置θ2在旋转方向r上相对于第一偏转段162a的磁极位置θ1在电角度下相位提前偏转角θe(本例中为30度)。
[0092]
因此,与实施方式1同样地,以在旋转方向r上相位最提前的第二偏转段162b的磁极位置θ2为基准而设定的最提前相位的dq轴的旋转坐标系由在第二偏转段162b的磁极位置θ2的方向上设定的d2轴和在相比于d2轴在电角度下相位提前90
°
的方向上设定的q2轴构成。
[0093]
以在旋转方向r上相位最延迟的第一偏转段162a的磁极位置θ1为基准而设定的最延迟相位的dq轴的旋转坐标系由在第一偏转段162a的磁极位置θ1的方向上设定的d1轴和在旋转方向r上相比于d1轴在电角度下相位提前90
°
的方向上设定的q2轴构成。
[0094]
《最大转矩电流控制中电流矢量的相位变化》在这种嵌入磁体型同步电动机中,q轴电感lq大于d轴电感ld,一般情况下通过最大转矩电流控制来设定电流指令值。在最大转矩电流控制中,如图21所示,对于同一电流,计算使发生转矩最大的d轴及q轴的电流指令值ido、iqo。随着转矩指令值tref增加,沿着最大转矩电流曲线,在q轴电流指令值iqo从0增加的同时,d轴电流指令值ido从0减少。
[0095]
即使在这种嵌入磁体型同步电动机中,若在最提前相位的dq轴的旋转坐标系表示电流的d2轴电流id2相比于在最提前相位的dq轴的旋转坐标系中通过最大转矩电流控制计算出的d轴的电流指令值向正方向增加,则与实施方式1的图9同样,产生磁饱和,电角度6阶转矩纹波分量增加。因此,即使电流矢量的绝对值|i|增加,若在最提前相位的dq轴的旋转坐标系中能够将d2轴电流id2维持在通过最大转矩电流控制计算出的d轴电流指令值ido附近,则可以抑制磁饱和的发生,抑制6阶转矩纹波分量的发生。因此,与实施方式1的图7相同,为了将d2轴电流id2维持在通过最大转矩电流控制计算出的d轴的电流指令值ido附近,需要使得随着电流矢量的绝对值|i|增加,使控制用磁极位置θc相对于最延迟相位的磁极位置θ1的相位提前α从与最延迟相位的磁极位置θ1和最提前相位的磁极位置θ2的中间相位θave对应的偏转角θe/2向与最提前相位的磁极位置θ2对应的偏转角θe接近。
[0096]
因此,电流控制部33将在最提前相位的dq轴的旋转坐标系上通过最大转矩电流控制计算出的电流指令值的电流矢量设为最提前相位的电流矢量iadv,将在中间相位的dq轴的旋转坐标系上通过最大转矩电流控制计算出的电流指令值的电流矢量设为中间相位的电流矢量iave,并且如图22所示那样,随着流过三相绕组的绕组电流增加,使所控制的电流矢量ic从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。
[0097]
根据该结构,在最提前相位的dq轴的旋转坐标系表示电流的d2轴电流id2能够维持在最提前相位的dq轴的旋转坐标系中通过最大转矩电流控制计算出的d轴电流指令值附近,因此能够抑制磁饱和的发生,抑制6阶转矩纹波分量的发生。
[0098]
《使用与实施方式1相同的方法的情况》磁极位置设定部331随着绕组电流增加,使控制用磁极位置θc从磁极位置θave向在旋转方向上相位最提前的磁极位置θ2的方向接近,该磁极位置θave是在旋转方向上相位最提前的第二偏转段112b的磁极位置θ2和在旋转方向上相位最延迟的第一偏转段112a的磁极位置θ1之间的中间相位的磁极位置。然后,电流指令值计算部332在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上,通过最大转矩电流控制计算控制用电流指令值。然后,电压指令值计算部333在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。
[0099]
与实施方式1不同,电流指令值计算部332在控制用dq轴的旋转坐标系上通过最大转矩电流控制来计算控制用d轴和q轴电流指令值ido和iqo。例如,电流指令值计算部332参照图21所示的预先设定了转矩指令值tref与d轴和q轴的电流指令值ido和iqo之间的关系的电流指令值设定数据,计算与当前的转矩指令值tref对应的控制用d轴和q轴电流指令值ido和iqo。关于其他点,由于与实施方式1相同,因此省略说明。
[0100]
《使用与实施方式2相同的方法的情况》磁极位置设定部331设定在旋转方向上相位最提前的第二偏转段112b的磁极位置θ2和在旋转方向上相位最延迟的第一偏转段112a的磁极位置θ1之间的中间相位的磁极位置θave,来作为控制用磁极位置θc。电流指令值计算部332在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上通过最大转矩电流控制计算电流指令值,将该电流指令值的d轴分量减少d轴电流减少量δid,从而计算控制用电流指令值。电流指令值计算部332增加d轴电流减少量δid,使得控制用电流指令值的电流矢量ic随着绕组电流增加而从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。然后,电压指令值计算部333在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。
[0101]
与实施方式2不同,电流指令值计算部332在中间相位的dq轴的旋转坐标系上通过最大转矩电流控制来计算中间相位的d轴和q轴电流指令值idave和iqave。例如,电流指令值计算部332参照图21所示的预先设定了转矩指令值tref与d轴和q轴电流指令值ido和iqo之间的关系的电流指令值设定数据,计算与当前的转矩指令值tref对应的中间相位的d轴和q轴电流指令值idave和iqave。
[0102]
然后,电流指令值计算部332如式(8)所示,将中间相位的d轴电流指令值idave减少d轴电流减少量δid来计算控制用d轴电流指令值ido。另外,电流指令值计算部332将中间相位的q轴电流指令值iqave直接设定为控制用q轴电流指令值iqo。
[0103]
电流指令值计算部332通过参照与图14同样地设定的预先设定了绕组电流|i|和d轴电流减少量δid之间的关系的减少量设定数据,计算与当前的绕组电流|i|对应的d轴电流减少量δid。减少量设定数据被设定为随着绕组电流|i|增加,使d轴电流减少量δid增加,以使控制用电流指令值的电流矢量ic从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。电流指令值计算部332如式(10)所示,基于中间相位的d轴电流指令值idave和q轴电流指令值iqave,计算电流矢量的绝对值来作为绕组电流|i|。
[0104]
电流指令值计算部332当绕组电流|i|超过被设定为小于上限电流值imax的值而得到的阈值ith时,随着绕组电流|i|接近上限电流值imax,使控制用电流指令值的电流矢量ic从最提前相位的电流矢量iadv接近中间相位的电流矢量iave。在本实施方式中,与图14同样,电流指令值计算部332当绕组电流|i|超过阈值ith时,随着绕组电流|i|接近上限电流值imax而将d轴电流减少量δid减少到零。
[0105]
5.实施方式5对实施方式5所涉及的旋转电机装置进行说明。省略与上述实施方式1、2或4相同的结构部分的说明。本实施方式所涉及的旋转电机1、逆变器4及控制装置6的基本结构与实施方式1、2或者4相同,但是构成为除了id=0控制或者最大转矩电流控制之外,还进行弱磁通控制,电流指令值的计算方法与实施方式1、2或者4不同。
[0106]
在弱磁通控制中,相比于通过id=0控制或最大转矩电流控制计算得到的d轴和q轴电流指令值,使d轴电流指令值更向负方向增加,从而减弱永磁体的磁通。在绕组的感应电压接近对应于电源电压vdc的上限电压的区域中执行弱磁通控制的执行区域。若使d轴电流指令值向负方向增加,减弱永磁体的磁通,则可起到减弱绕组的感应电压的效果,增加旋转电机的转矩。
[0107]
电流控制部33参照图23所示的预先设定了旋转角速度ω及转矩指令值tref与各控制的执行区域的关系的执行区域设定数据,判定与当前的旋转角速度ω及转矩指令值tref对应的控制的执行区域。
[0108]
电流控制部33在判定为是id=0控制的执行区域或最大转矩电流控制的执行区域的情况下,与实施方式1、2或4相同,在最提前相位的dq轴的旋转坐标系上,将通过id=0控制或最大转矩电流控制计算出的电流指令值的电流矢量设为最提前相位的电流矢量iadv,在中间相位的dq轴的旋转坐标系上,将通过id=0控制或最大转矩电流控制计算出的电流指令值的电流矢量设为中间相位的电流矢量iave,随着流过三相绕组的绕组电流增加,使所控制的电流矢量ic从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。
[0109]
另一方面,当电流控制部33判定为是弱磁通控制的执行区域时,在最提前相位的dq轴的旋转坐标系上,将通过弱磁通控制计算出的电流指令值的电流矢量设为最提前相位的电流矢量iadv,在中间相位的dq轴的旋转坐标系上,将通过弱磁通控制计算出的电流指令值的电流矢量设为中间相位的电流矢量iave,并且随着流过三相绕组的绕组电流增加,所控制的电流矢量ic从中间相位的电流矢量iave向最提前相位的电流矢量iadv接近。
[0110]
《使用与实施方式1相同的方法的情况》对使用与实施方式1相同的方法的情况进行说明。磁极位置设定部331随着绕组电流增加,使控制用磁极位置θc从中间相位的磁极位置θave向在旋转方向上相位最提前的磁极位置θ2的方向接近。然后,电流指令值计算部332在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上,通过弱磁通控制计算控制用电流指令值。然后,电压指令值计算部333在以控制用磁极位置θc为基准而设定的控制用dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。
[0111]
电流指令值计算部332在控制用dq轴的旋转坐标系上通过弱磁通控制来计算控制用d轴和q轴电流指令值ido和iqo。例如,电流指令值计算部332计算施加到绕组的相间电压的有效值vamp,并且对d轴电流指令值ido进行增减,以使得相间电压的有效值vamp接近目标有效值vampo。
[0112]
以下述情况为例进行说明,即:通过弱磁通控制,相比于通过id=0控制计算出的d轴和q轴电流指令值,使d轴电流指令值更向负方向增加。电流指令值计算部332使用下式基于上次运算周期的d轴和q轴电压指令值vdo和vqo计算相间电压的有效值vamp。电流指令值计算部332基于电源电压vdc设定目标有效值vampo。vamp=√(vdo2 vqo2)vampo=vdc/√(2)
···
(11)
[0113]
然后,电流指令值计算部332如下式所示,计算相间电压的有效值vamp与目标有效值vampo之间的偏差δvamp,并对偏差δvamp进行积分,计算控制用d轴电流指令值ido。在积分运算中,电流指令值计算部332将控制用d轴电流指令值ido限制为上限是在id=0控制的情况下的0,并且计算0以下的控制用d轴电流指令值ido。这里,ki是积分增益。此外,电流指令值计算部332以与id=0控制同样的方式计算控制用q轴电流指令值iqo。
[0114]
通过弱磁通控制,在使d轴电流指令值相比于通过最大转矩电流控制计算出的d轴和q轴的电流指令值更向负方向增加的情况下,控制用q轴电流指令值iqo也发生变化。另外,在积分演算中,控制用d轴电流指令值ido的上限被最大转矩电流控制时的d轴电流指令值所限制。
[0115]
《使用与实施方式2相同的方法的情况》磁极位置设定部331将中间相位的磁极位置θave设定为控制用磁极位置θc。电流指令值计算部332在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上通过弱磁通控制计算电流指令值,将该电流指令值的d轴分量减少d轴电流减少量δid,从而计算控制用电流指令值。电流指令值计算部332随着绕组电流增加而使d轴电流减少量δid增加,使得控制用电流指令值的电流矢量ic从通过弱磁通控制计算出的中间相位的电流矢量iave向通过弱磁通控制计算出的最提前相位的电流矢量iadv接近。然后,电压指令值计算部333在以中间相位的磁极位置θave为基准而设定的中间相位的dq轴的旋转坐标系上,基于电流检测值和控制用电流指令值,计算电压指令值。
[0116]
以下述情况为例进行说明,即:通过弱磁通控制,相比于通过id=0控制计算出的d轴和q轴电流指令值,使d轴电流指令值更向负方向增加。与上述式(11)同样地,电流指令值计算部332计算相间电压的有效值vamp和目标有效值vampo。
[0117]
然后,电流指令值计算部332如下式所示,计算相间电压的有效值vamp与目标有效值vampo之间的偏差δvamp,并对偏差δvamp进行积分,计算中间相位的d轴电流指令值idave。在积分运算中,电流指令值计算部332将中间相位的d轴电流指令值idave限制为上限是在id=0控制的情况下的0,并且计算0以下的中间相位的d轴电流指令值idave。此外,电流指令值计算部332以与id=0控制同样的方式计算中间相位的q轴电流指令值iqave。332以与id=0控制同样的方式计算中间相位的q轴电流指令值iqave。
[0118]
通过弱磁通控制,在使d轴电流指令值相比于通过最大转矩电流控制计算出的d轴和q轴电流指令值更向负方向增加的情况下,中间相位的q轴电流指令值iqave也发生变化。另外,在积分运算中,中间相位的d轴电流指令值idave的上限被最大转矩电流控制时的d轴电流指令值所限制。
[0119]
然后,电流指令值计算部332如下式所示,将中间相位的d轴电流指令值idave减少d轴电流减少量δid来计算控制用d轴电流指令值ido。另外,电流指令值计算部332将中间相位的q轴电流指令值iqave直接设定为控制用q轴电流指令值iqo。d轴电流减少量δid与实施方式1相同地被设定。
ido=idave-δidiqo=iqave
···
(14)
[0120]
[其它实施方式]最后,对本技术的其他的实施方式进行说明。另外,下面说明的各实施方式的结构并不限于分别单独地进行应用,只要不产生矛盾,也能与其它实施方式的结构相组合来进行应用。
[0121]
(1)在上述实施方式3中,以旋转电机用于电动助力转向装置的驱动力源的情况为例进行了说明。但是,旋转电机可以用于各种用途,例如用于车轮的动力装置等。
[0122]
(2)在上述实施方式1中,电流指令值计算部332当绕组电流|i|超过被设定为小于上限电流值imax的值而得到的阈值ith时,随着绕组电流|i|接近上限电流值imax,使控制用电流指令值的电流矢量ic从最提前相位的电流矢量iadv向中间相位的电流矢量iave接近。电流指令值计算部332当绕组电流|i|超过阈值ith时,随着绕组电流|i|接近上限电流值imax,使控制用的磁极位置θc接近中间相位的磁极位置θave。具体而言,如图24所示,当绕组电流|i|超过阈值ith时,随着绕组电流|i|接近上限电流值imax,使磁极位置的校正量δθ从偏转角θe/2向0接近。
[0123]
电流指令值计算部332如下式所示,计算在中间相位的dq轴的旋转坐标系中表示绕组电流|i|的qave轴的分量,以作为绕组电流|i|。|i|=√(ido2 iqo2)
×
sin(δθ)
···
(15)
[0124]
另外,相比于最大转矩的增加,在要求减少6阶转矩纹波分量的旋转电机中,也可以不进行本处理。
[0125]
(3)在上述各实施方式中,以下述情况为例进行了说明,即:在永磁体中,在轴向x上以两个阶段的方式设置有使磁极位置在周向上偏移的偏转。然而,在永磁体中,可以在轴向x上以三个阶段以上或连续的方式设置有使磁极位置在周向上偏移的偏转。
[0126]
例如,如图25所示,可以在轴向x上以四个阶段的方式设置使磁极位置在周向上偏移的偏转。从轴向的一侧x1朝向轴向的另一侧x2,依次设置有第一偏转段182a、第二偏转段182b、第三偏转段182c和第四偏转段182d,并且磁极位置在旋转方向r上以电角度分别偏移15度。八个磁极181(四个n极和四个s极)在周向上以等间隔配置在各个偏转段的外周部,并嵌入转子11的内部。
[0127]
在旋转方向r上相位最提前的第四偏转段182d的磁极(n极)和在旋转方向r上相位最延迟的第一偏转段182a的磁极(n极)在电角度上偏移偏转角θe(本例中为60度)。
[0128]
在这种情况下,最提前相位的dq轴的旋转坐标系被设定为在旋转方向r上相位最提前的第四偏转段182d的磁极位置的方向上确定的d轴、以及相比于该d轴相位在电角度上提前90
°
的方向上确定的q轴。中间相位的dq轴的旋转坐标系被设定为在旋转方向r上相位最提前的第四偏转段182d的磁极位置与在旋转方向r上相位最延迟的第一偏转段182a的磁极位置的中间相位的方向上确定的d轴、以及相比于该d轴相位在电角度上提前90
°
的方向上确定的q轴。
[0129]
或者,如图26所示,可以在轴向x上连续地设置使磁极位置在周向上偏移的偏转。八个磁极191(四个n极和四个s极)在周向上以等间隔配置在转子的外周部,并附着在转子的表面。从轴向的一侧x1朝向轴向的另一侧x2,各磁极191连续地在旋转方向r上偏移。
[0130]
如图27中的展开图所示,在旋转方向r上相位最提前的轴向的一侧x1的端部的磁极(n极)与在旋转方向r上相位最延迟的轴向的另一侧x2的端部的磁极(n极)在电角度上偏移偏转角θe(本例中为60度)。
[0131]
在这种情况下,最提前相位的dq轴的旋转坐标系被设定为在旋转方向r上相位最提前的轴向的一侧x1的端部的磁极位置的方向上确定的d轴、以及相比于该d轴相位在电角度上提前90
°
的方向上确定的q轴。中间相位的dq轴的旋转坐标系被设定为在旋转方向r上相位最提前的轴向的一侧x1的端部的磁极位置与相位最延迟的轴向的另一侧x2的端部的磁极位置的中间相位的方向上确定的d轴、以及相比于该d轴相位在电角度上提前90
°
的方向上确定的q轴。
[0132]
或者,如图28中的展开图所示,在轴向x上连续地使磁极位置在周向上偏移的偏转可以近似于在轴向x上以两个阶段的方式使磁极位置在周向上偏移的偏转。将轴向的一侧x1的偏转段192a的磁极位置设定为轴向的一侧x1的一半的磁极的周向的中心位置,将轴向的另一侧x2的偏转段192b的磁极位置设定为轴向的另一侧x2的一半的磁极的周向的中心位置。
[0133]
最提前相位的dq轴的旋转坐标系被设定为在旋转方向r上相位最提前的轴向的另一侧x2的偏转段192b的磁极位置的方向上确定的d轴、以及相比于该d轴相位在电角度上提前90
°
的方向上确定的q轴。中间相位的dq轴的旋转坐标系被设定为在旋转方向r上相位最提前的轴向的另一侧x2的偏转段192b的磁极位置与在旋转方向r上相位最延迟的轴向的一侧x1的偏转段192a的磁极位置的中间相位的方向上确定的d轴、以及相比于该d轴相位在电角度上提前90
°
的方向上确定的q轴。
[0134]
虽然本技术记载了各种示例性实施方式和实施例,但是在一个或多个实施方式中记载的各种特征、方式和功能不限于特定实施方式的应用,可以单独地或以各种组合来应用于实施方式。因此,可以认为未例示的无数变形例也包含在本技术说明书所公开的技术范围内。例如,设为包括对至少一个构成要素进行变形、添加或省略的情况,以及提取至少一个构成要素并与其他实施方式的构成要素进行组合的情况。标号说明
[0135]
1旋转电机、3直流电源、4逆变器、6控制装置、31旋转检测部、32电流检测部、33电流控制部、34开关控制部、iadv最提前相位的电流矢量、iave中间相位的电流矢量、ic控制用电流指令值的电流矢量、ido控制用d轴电流指令值、iqo控制用q轴电流指令值、idave中间相位的d轴电流指令值、iqave中间相位的q轴电流指令值、idr控制用d轴电流检测值、iqr控制用q轴电流检测值、imax上限电流值、ith阈值、r旋转方向、r1一侧的旋转方向、r2另一侧的旋转方向、vdo控制用d轴电压指令值、vqo控制用q轴电压指令值、δid d轴电流减少量、θ1最延迟相位的磁极位置、θ2最提前相位的磁极位置、θave中间相位的磁极位置、θc控制用的磁极位置、θe偏转角。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。