1.本发明涉及阵列天线设计技术领域,具体涉及一种共域多口径混合阵列天线布阵方法及系统。
背景技术:
2.雷达在军用和民用领域扮演着重要的角色,而雷达成像则是雷达发展史上的重要里程碑,成像功能使得雷达具有了对各类合作或非合作目标进行成像和可视的能力。雷达对空的成像技术目前主要是实孔径雷达和逆合成孔径雷达,实孔径雷达可利用天线阵列采集的单次“快拍”数据获得目标的瞬时雷达图像,但分辨率不是很高;逆合成孔径雷达与合成孔径雷达一样,是依靠雷达与目标之间的相对运动形成合成阵列来提高方位分辨率。近些年,雷达领域引入了一种新体制雷达——多输入多输出(mimo)雷达。这种雷达在发射和接收端均采用多天线,各个天线同时辐射相互正交的信号波形,接收端的每个天线接收所有发射信号并在后端进行信号分选,进而获得远多于实际收、发阵元数目的观测通道和自由度。由于不同的发射阵元发射不同的正交信号,mimo雷达无法形成和相控阵雷达一样的发射波束。
3.为了获取尽可能大的虚拟孔径,mimo雷达主要采用稀疏排布的方式。但实际应用中,mimo大阵列需要连续几百米或者几千米的排布空间,稀疏阵列优化的目的则是采用尽可能少的阵元来实现期望的方向图或者采用固定数量的阵元通过优化阵元的位置排布来实现抑制阵元方向图的旁瓣电平。在实际设计中,发射阵元和接收阵元同时排布在一个区域内,即“共域”;另外,发射阵元和接收阵元排布于不同口径的区域内,即“多口径”;在排布方式上,发射阵元和接收阵元混合排布,两者相互交织在一起形成混合阵列天线。基于上述阵元排布条件限制,根据天线单元尺寸,两种单元之间需满足各自的单元间距限制,即该单元与其附近单元的距离需满足一定要求使其与附近单元不出现重叠现象,优化过程较为复杂。上述问题亟待解决,为此,提出一种共域多口径混合阵列天线布阵方法及系统。
技术实现要素:
4.本发明所要解决的技术问题在于:如何解决在实现相同区域内多种口径阵列天线稀疏优化设计的同时如何提高大型阵列天线稀疏优化效率,提供了一种共域多口径混合阵列天线布阵方法,该方法通过引入备选阵元,备选阵元与规定数量的阵元初始位置同时产生,在优化过程中提高优化效率,便于寻得更优的结果。各种口径阵列天线混合排布在规定区域内,相邻天线阵元之间满足间距要求使两两之间不存在天线单元相交或重叠的现象。天线单元位置优化过程中,根据阵列天线种类依次构建共域多口径间距限制矩阵,再依次按照间距限制矩阵对这种类别的阵列天线单元进行寻址,最后根据确定后的混合阵列天线位置计算适应度值并进行优化算法迭代。本发明选择的优化算法为改进型粒子群算法,改进型粒子群算法基于基本粒子群算法,基本粒子群算法由鸟类迁徙模型演进而来,粒子在寻址过程中通过不断调整自身的速度来逐渐逼近理想地点,粒子的速度可以通过优化权重
参数来调整。
5.本发明是通过以下技术方案解决上述技术问题的,本发明包括以下步骤:
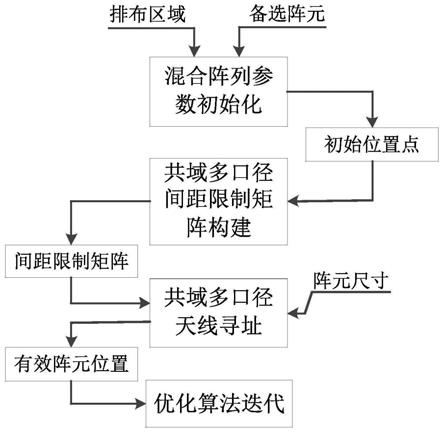
6.s1:混合阵列参数初始化
7.基于排布区域建立全局坐标系xoy,设置备选阵元数量,并将其与规定阵元数量叠加获得混合阵列中各种阵元总数,在排布区域范围内随机产生对应数量的初始位置点;
8.s2:共域多口径间距限制矩阵构建
9.根据步骤s1中的备选阵元数和各种阵元总数依次构建共域多口径间距限制矩阵,构建时各种阵元间的间距依据各种阵元自身的尺寸而定,矩阵数与阵列个数相同;将间距限制矩阵保存并于下一个步骤中使用;
10.s3:共域多口径天线寻址
11.根据步骤s2中的间距限制矩阵,依次对各种阵列天线阵元进行寻址,寻址过程为网格化点试,寻址完成后确定各种阵列天线的阵元位置,并判断寻址后的阵元是否存在不符合间距矩阵的情况,若没有,则寻址过程有效;
12.s4:优化算法迭代
13.根据步骤s3中寻址过程获得的混合阵列天线的阵元位置,计算适应度值并代入改进型粒子群算法中迭代进化,新一代生成的阵元均重复步骤s2~s3。
14.更进一步地,共域多口径阵列天线包括至少2种口径的阵列天线,假设2种阵列天线分别为阵列天线a1和阵列天线a2,2种阵列天线的待优化阵元数分别为n1和n2,2种阵列天线的阵元尺寸分别为d1和d2,初始位置点的集合p
xy
为阵列天线a1和阵列天线a2的初始阵元位置,每个阵元的位置通过该点在x轴和y轴上的投影值表示,p
xy
包括x轴投影值p
x
和y轴投影值py。
15.更进一步地,在所述步骤s1中,设置备选阵元数时,2种阵列天线均设置备选阵元数,备选阵元数为这种阵列规定阵元数的15%,阵列天线a1的阵元总数n1为n1*(1 15%),阵列天线a2的阵元总数n2为n2*(1 15%)。
16.更进一步地,在所述步骤s2中,共域多口径阵列天线间距限制矩阵包括矩阵m1~m4,矩阵构建的具体过程如下:
17.s21:构建间距限制矩阵m1,用于筛选初始阵元中不符合阵元间距要求的阵元;
18.先构建间距限制向量如下:
[0019][0020]
接着构建间距限制矩阵m1如下:
[0021][0022]
其中,t表示向量的转置;
[0023]
s22:构建间距限制矩阵m2,用于判断阵列a1寻址后阵列a1中阵元是否符合阵元间距要求;
[0024]
先构建间距限制向量如下:
[0025][0026]
接着构建间距限制矩阵m2如下:
[0027][0028]
s23:构建间距限制矩阵m3,用于筛选阵列a2中不符合阵元间距要求的阵元;
[0029]
先构建间距限制向量如下:
[0030][0031]
接着构建间距限制矩阵m3如下:
[0032][0033]
s24:构建间距限制矩阵m4,用于判断阵列a2寻址后中阵列a2中阵元是否符合阵元间距要求;
[0034]
先构建间距限制向量如下:
[0035][0036]
接着构建间距限制矩阵m4如下:
[0037][0038]
更进一步地,在所述步骤s3中,混合阵列天线单次寻址过程的具体过程如下:
[0039]
s31:对阵列a1进行寻址,使阵列a1中阵元均满足间距限制条件;
[0040]
s32:对阵列a1寻址结果进行判断,若阵元均符合间距限制条件,则进行下一步;
[0041]
s33:对阵列a2进行寻址,使阵列a2中阵元均满足间距限制条件;
[0042]
s34:对阵列a2寻址结果进行判断,若阵元均符合间距限制条件,则此次寻址完成。
[0043]
更进一步地,在所述步骤s3中,寻址过程为:首先根据所述步骤s2中的间距限制矩阵找出阵列中不满足间距限制条件的阵元组合,接着将整个排布区域用一张布满有效位置点的网格填充,接着固定阵元组合中的一个阵元并将另一个阵元依次放置于网格中的有效位置点处,最后判断阵元所处有效位置点时不满足间距限制条件的阵元中是否包含该阵元,若不包含该阵元,则该阵元寻址成功,若包含该阵元,继续放置于其余有效位置点处并
重复上述过程。
[0044]
更进一步地,在所述步骤s3中,在寻址过程中,判断阵列中当前不符合间距限制条件的阵元数是否小于或等于备选阵元数,若是,停止寻址过程,从当前阵元中去除不符合间距限制条件的阵元,若不是,继续进行逐个阵元寻址,直至当前不符合间距限制条件的阵元数小于或等于备选阵元数。
[0045]
更进一步地,在所述步骤s3中,混合阵列天线阵元位置包括两个阵列天线中所有阵元的位置信息,对特定阵列天线进行寻址时需将该阵列天线所有阵元位置提至混合阵列天线阵元位置的前列;混合阵列天线阵元位置后半部分保持不变,对特定阵列天线进行针对性寻址操作。
[0046]
更进一步地,在所述步骤s4中,适应值计算前对完成寻址的混合阵列天线位置信息进行是否符合间距限制条件的判断,若阵元均满足间距限制条件,计算该阵列天线的方向图副瓣电平并作为适应度值,若存在不满足间距限制条件的阵元,设置适应值为固定值。
[0047]
更进一步地,在所述步骤s4中,改进型粒子群算法指在基本粒子群算法基础上引入了云自适应模型作为算法优化权重参数,云自适应模型通过期望、熵、超熵将模糊性与随机性量化。
[0048]
本发明还提供了一种共域多口径混合阵列天线布阵系统,采用上述的布阵方法对共域多口径阵列天线的阵元位置进行排布,包括:
[0049]
混合阵列参数初始化模块,用于基于排布区域建立全局坐标系xoy,设置备选阵元数量,并将其与规定阵元数量叠加获得混合阵列中各种阵元总数,在排布区域范围内随机产生对应数量的初始位置点;
[0050]
共域多口径间距限制矩阵构建模块,用于根据备选阵元数和各种阵元总数依次构建共域多口径间距限制矩阵;
[0051]
共域多口径天线阵元寻址模块,用于根据间距限制矩阵,依次对各种阵列天线阵元进行寻址,寻址过程为网格化点试,寻址完成后确定各种阵列天线的阵元位置,并判断寻址后的阵元是否存在不符合间距矩阵的情况,若没有,则寻址过程有效;
[0052]
优化算法迭代模块,用于根据寻址过程获得的混合阵列天线的阵元位置,计算适应度值并代入改进型粒子群算法中迭代进化;
[0053]
控制处理模块,用于向各模块发出指令,完成相关动作;
[0054]
所述混合阵列参数初始化模块、共域多口径间距限制矩阵构建模块、共域多口径天线阵元寻址模块、优化算法迭代模块均与所述控制处理模块电连接。
[0055]
本发明相比现有技术具有以下优点:
[0056]
1、采用备选阵元可有效将寻址阵元的数量降至最低,大幅度提高阵列寻址的效率,避免多余的寻址计算。
[0057]
2、改进型粒子群算法通过引入随机性模型增加了优化参数的自由度和不确定性,可避免基本粒子群算法的局部收敛问题,提高了寻得最优解的概率。
[0058]
3、适用于共域多口径混合阵列天线,在满足阵元放置空间尺寸的前提下实现了在不同口径内稀疏排布不同的阵元,大幅度提高了稀疏阵列布阵效率。
[0059]
4、可进行阵列口径扩展,不仅适用于两个阵列混合排布优化,可适用于更多阵列混合排布优化;优化时只需将待寻址阵列的阵元位置提前,有助于解决大型复杂多阵列排
布问题;多个阵列相同口径情况下的布阵是共域多口径的一种特殊情况,本发明中的方法自然适用于该特殊情况;该方法可将优化结果反馈,指导对区域口径尺寸的调整,优化时已结合实际阵元尺寸,因此优化结果具有工程实施性。由本方法获得的阵列天线具有低副瓣、高增益特性,当该方法应用于大型地面成像雷达系统时,可有效提高雷达的成像精度和工作距离。
附图说明
[0060]
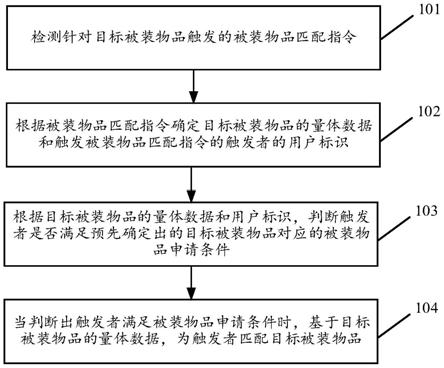
图1是本发明实施例一中共域多口径阵列天线布阵方法流程图;
[0061]
图2是本发明实施例二中经过优化获得的1个混合阵列天线阵元位置示意图;
[0062]
图3是本发明实施例二中混合阵列天线经过优化后10ghz处的法向φ=0
°
切面合方向图;
[0063]
图4是本发明实施例二中混合阵列天线经过优化后10ghz处的扫描30
°
时φ=0
°
切面合方向图;
[0064]
图5是本发明实施例二中混合阵列天线经过优化后10ghz处的法向φ=90
°
切面合方向图;
[0065]
图6是本发明实施例二中混合阵列天线经过优化后10ghz处的扫描30
°
时φ=90
°
切面合方向图;
[0066]
图7是本发明实施例三中经过优化获得的1个混合阵列天线阵元位置示意图;
[0067]
图8是本发明实施例三中混合阵列天线经过优化后3ghz处的法向φ=0
°
切面合方向图;
[0068]
图9是本发明实施例三中混合阵列天线经过优化后3ghz处的扫描45
°
时φ=0
°
切面合方向图;
[0069]
图10是本发明实施例三中混合阵列天线经过优化后3ghz处的法向φ=90
°
切面合方向图;
[0070]
图11是本发明实施例三中混合阵列天线经过优化后3ghz处的扫描45
°
时φ=90
°
切面合方向图。
具体实施方式
[0071]
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0072]
实施例一
[0073]
本实施例提供一种共域多口径阵列天线稀疏优化方法,最终得到混合阵列天线阵元布阵分布以及最低副瓣时阵列方向图。如图1所示,图1为本实施例中的共域多口径混合阵列天线布阵方法流程图,本发明引入备选阵元,备选阵元与规定数量的阵元初始位置同时产生,在优化过程中提高优化效率,便于寻得更优的结果。各种口径阵列天线混合排布在规定区域内,相邻天线阵元之间满足间距要求使两两之间不存在天线单元相交或重叠的现象。天线单元位置优化过程中,根据阵列天线种类依次构建共域多口径间距限制矩阵,再依次按照间距限制矩阵对这种类别的阵列天线单元进行寻址,最后根据确定后的混合阵列天
线位置计算适应度值并进行优化算法迭代。本发明选择的优化算法为改进型粒子群算法,改进型粒子群算法基于基本粒子群算法,基本粒子群算法由鸟类迁徙模型演进而来,粒子在寻址过程中通过不断调整自身的速度来逐渐逼近理想地点,粒子的速度可以通过优化权重参数来调整。具体实现过程包括以下步骤:
[0074]
s1:混合阵列参数初始化
[0075]
基于排布区域建立全局坐标系xoy,设置备选阵元数量,并将其与规定阵元数量叠加获得混合阵列中各种阵元总数,在排布区域内随机产生对应数量的初始位置点;
[0076]
s2:共域多口径间距限制矩阵构建
[0077]
根据步骤s1中的备选阵元数和各种阵元总数依次构建共域多口径间距限制矩阵,构建时各种阵元间的间距依据各种阵元自身的尺寸而定,矩阵数与阵列个数相同;将间距限制矩阵保存并于下一个步骤中使用;
[0078]
s3:共域多口径天线寻址
[0079]
根据步骤s2中的间距限制矩阵,依次对各种天线阵元进行寻址,寻址过程为网格化点试,寻址完成后确定各种阵列天线的阵元位置,并判断寻址后的阵元是否存在不符合间距矩阵的情况,若没有,则寻址过程有效;
[0080]
s4:优化算法迭代
[0081]
根据步骤s3中寻址过程获得的混合阵列天线的阵元位置,计算适应度值并代入改进型粒子群算法中迭代进化,新一代生成的阵元均重复步骤s2~s3。
[0082]
在本实施例中,共域多口径阵列天线包括2种口径的阵列天线(阵列a1和阵列a2),2种阵列的待优化阵元数分别为n1和n2,2种阵列的阵元尺寸分别为d1和d2;初始位置点的集合p
xy
为阵列a1和阵列a2的初始阵元位置,每个阵元的位置通过该点在x轴和y轴上的投影值表示,p
xy
包括x轴投影值p
x
和y轴投影值py。
[0083]
在本实施例中,设置备选阵元数,2种阵列均设置备选阵元数,备选阵元数为这种阵列规定阵元数的15%,阵列a1的阵元总数n1为n1*(1 15%),阵列a2的阵元总数n2为n2*(1 15%)。
[0084]
在本实施例中,在所述步骤s2中,共域多口径阵列天线间距限制矩阵包括矩阵m1~m4,矩阵构建的具体过程如下:
[0085]
s21:构建间距限制矩阵m1,用于筛选初始阵元中不符合阵元间距要求的阵元;
[0086]
先构建间距限制向量如下:
[0087][0088]
接着构建间距限制矩阵m1如下:
[0089][0090]
其中,t表示向量的转置;
[0091]
s22:构建间距限制矩阵m2,用于判断阵列a1寻址后阵列a1中阵元是否符合阵元间
距要求;
[0092]
先构建间距限制向量如下:
[0093][0094]
接着构建间距限制矩阵m2如下:
[0095][0096]
s23:构建间距限制矩阵m3,用于筛选阵列a2中不符合阵元间距要求的阵元;
[0097]
先构建间距限制向量如下:
[0098][0099]
接着构建间距限制矩阵m3如下:
[0100][0101]
s24:构建间距限制矩阵m4,用于判断阵列a2寻址后中阵列a2中阵元是否符合阵元间距要求;
[0102]
先构建间距限制向量如下:
[0103][0104]
接着构建间距限制矩阵m4如下:
[0105][0106]
在本实施例中,在所述步骤s3中,混合阵列天线单次寻址过程的具体过程如下:
[0107]
s31:对阵列a1进行寻址,使阵列a1中阵元均满足间距限制条件;
[0108]
s32:对阵列a1寻址结果进行判断,若阵元均符合间距限制条件,则进行下一步;
[0109]
s33:对阵列a2进行寻址,使阵列a2中阵元均满足间距限制条件;
[0110]
s34:对阵列a2寻址结果进行判断,若阵元均符合间距限制条件,则此次寻址完成。
[0111]
在本实施例中,在所述步骤s3中,寻址过程为:首先根据所述步骤s2中的间距限制矩阵找出阵列中不满足间距限制条件的阵元组合,接着将整个有效区域(即排布区域,两个阵列天线单元可以排布的有效区域)用一张布满有效位置点的网格填充,接着固定阵元组合中的一个阵元并将另一个阵元依次放置于网格中的有效位置点处,最后判断阵元所处有
效位置点时不满足间距限制条件的阵元中是否包含该阵元,若不包含该阵元,则该阵元寻址成功,若包含该阵元,继续放置于其余有效位置点处并重复上述过程。
[0112]
在本实施例中,在所述步骤s3中,寻址过程中根据备选阵元提高寻址效率;在寻址过程中,判断阵列中当前不符合间距限制条件的阵元数是否小于或等于备选阵元数,若是,停止寻址过程,从当前阵元中去除不符合间距限制条件的阵元,若不是,继续进行逐个阵元寻址,直至当前不符合间距限制条件的阵元数小于或等于备选阵元数。
[0113]
在本实施例中,在所述步骤s3中,混合阵列天线阵元位置包括两个阵列天线中所有阵元的位置信息,对特定阵列天线(是指两个阵列天线中的任一个)进行寻址时需将该阵列天线所有阵元位置提至混合阵列天线阵元位置的前列;混合阵列天线阵元位置后半部分保持不变,对特定阵列天线进行针对性寻址操作。
[0114]
在本实施例中,在所述步骤s4中,适应值计算前对完成寻址的混合阵列天线位置信息进行是否符合间距限制条件的判断,若阵元均满足间距限制条件,计算该阵列的方向图副瓣电平并作为适应度值,若存在不满足间距限制条件的阵元,设置适应值为固定值。
[0115]
在本实施例中,在所述步骤s4中,改进型粒子群算法指在基本粒子群算法基础上引入了云自适应模型作为算法优化权重参数,云自适应模型通过期望、熵、超熵将模糊性与随机性量化,该云自适应模型通过云滴产生符合一定分布规律的随机数,通过判断该随机数与所设置阈值的关系决定遗传算法中变异过程的参数,使变异过程更符合自然排布规律。
[0116]
实施例二
[0117]
本实施例优化的混合阵列天线口径为直径0.6m的圆形区域,设置x轴和y轴如图2所示。待优化混合阵列天线工作于8~12ghz频段,由两个阵列天线组成:发射阵列天线和接收阵列天线。发射阵列天线阵元数为16个,阵元尺寸为19.2mm,分布在直径0.4m的圆形区域;接收阵列天线阵元数为32个,阵元尺寸为28.7mm,分布在直径0.6m的圆形区域。所有阵元均以独立单元形式布局,网格的有效位置点位于众多共心的圆环上,相邻有效位置点之间相差角度为0.5
°
,相邻圆环之间半径相差为5mm。优化过程中初始阵列参数由包括备选阵元在内的54个阵元的位置信息组成,随机生成一组位置信息作为初始值代入改进型粒子群算法中,结合间距限制矩阵对混合阵列天线进行寻址,直到所有阵元位置为有效坐标。优化时设置发射阵元间距为20mm,接收阵元间距为30mm。两个阵列天线方向图的乘积为混合阵列天线的合方向图。以两个阵列法向和扫描30
°
时合方向图的目标副瓣构建适应度函数,采用改进型粒子群算法对合方向图的副瓣电平进行优化计算,过程中新生成的阵元位置进行寻址操作。种群个数设置为400个,优化次数设置为100次。
[0118]
如图2~6所示,图2是本实施例中经过优化获得的1个混合阵列天线阵元位置,图3是本实施例中混合阵列天线经过优化后10ghz处的法向φ=0
°
切面合方向图,图4是本实施例中混合阵列天线经过优化后10ghz处的扫描30
°
时φ=0
°
切面合方向图,图5是本实施例中混合阵列天线经过优化后10ghz处的法向φ=90
°
切面合方向图,图6是本实施例中混合阵列天线经过优化后10ghz处的扫描30
°
时φ=90
°
切面合方向图。图2中“1”为发射阵列天线布阵区域边界,“2”为接收阵列天线布阵区域边界,“3”为发射阵列天线阵元,“4”为接收阵列天线阵元。
[0119]
由上述可得,本实施例优化过程所用时间小于3.5h,优化所得阵列合方向图的法
向副瓣电平实现-22db以下,扫描方向图副瓣电平实现-16db以下。
[0120]
实施例三
[0121]
本实施例优化的混合阵列天线口径为直径12m圆形区域,设置x轴和y轴如图7所示。待优化混合阵列天线工作于2~4ghz频段,由两个阵列天线组成:阵列天线一和阵列天线二。阵列天线一阵元数为96个,阵元尺寸为53.5mm,分布在直径8m的圆形区域;阵列天线二阵元数为256个,阵元尺寸为82mm,分布在直径12m的圆形区域。所有阵元均以独立单元形式布局,网格的有效位置点位于众多共心的圆环上,相邻有效位置点之间相差角度为0.3
°
,相邻圆环之间半径相差为8mm。优化过程中初始阵列参数由包括备选阵元在内的404个阵元的位置信息组成,随机生成一组位置信息作为初始值代入改进型粒子群算法中,结合间距限制矩阵对混合阵列天线进行寻址,直到所有阵元位置为有效坐标。优化时设置阵列天线一阵元间距为55mm,阵列天线二阵元间距为84mm。以两个阵列法向和扫描45
°
时合方向图的目标副瓣构建适应度函数,采用改进型粒子群算法对合方向图的副瓣电平进行优化计算,过程中新生成的阵元位置进行寻址操作。种群个数设置为500个,优化次数设置为100次。
[0122]
如图7~11所示,图7是本实施例中经过优化获得的1个混合阵列天线阵元位置,图8是本实施例中混合阵列天线经过优化后3ghz处的法向φ=0
°
切面合方向图,图9是本实施例中混合阵列天线经过优化后3ghz处的扫描45
°
时φ=0
°
切面合方向图,图10是本实施例中混合阵列天线经过优化后3ghz处的法向φ=90
°
切面合方向图,图11是本实施例中混合阵列天线经过优化后3ghz处的扫描45
°
时φ=90
°
切面合方向图。图7中“1”为阵列天线一布阵区域边界,“2”为阵列天线二布阵区域边界,“3”为阵列天线一阵元,“4”为阵列天线二阵元。
[0123]
由上述可得,本实施例优化过程所用时间小于8h,优化所得阵列合方向图的法向副瓣电平实现-28db以下,扫描方向图副瓣电平实现-24.8db以下。
[0124]
综上所述,上述实施例的共域多口径混合阵列天线布阵方法,可应用于多种口径阵列阵元间距限制条件下有效排布阵元的求解问题,大幅度提高了优化效率;可进行阵列口径扩展,不仅适用于两个阵列混合排布优化,可适用于更多阵列混合排布优化,有助于解决大型复杂多阵列排布问题;该方法可将优化结果反馈,指导对区域口径尺寸的调整,优化时已结合实际阵元尺寸,优化结果具有工程实施性;由本方法获得的阵列天线具有低副瓣、高增益特性,当该方法应用于大型地面成像雷达系统时,可有效提高雷达的成像精度和工作距离,值得被推广使用。
[0125]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。