1.本发明属于煤矿安全监测技术领域,涉及一种关闭煤矿瓦斯泄漏监测及灾害防控方法及系统。
背景技术:
2.瓦斯,指储存在煤层中以甲烷为主要成分、以吸附在煤基质颗粒表面为主、部分游离于煤孔隙中或溶解于煤层水中的烃类气体,是煤的伴生矿产资源。瓦斯是煤炭开采过程的最主要安全隐患之一,煤与瓦斯突出、瓦斯爆炸等瓦斯事故死亡人数长期占煤矿事故总死亡人数的一半以上。同时瓦斯的热值与天然气相当,是通用煤的2~5倍,而且燃烧后很洁净,几乎不产生任何废气,是上好的工业、化工、发电和居民生活燃料。瓦斯直接排放到大气中,其温室效应约为二氧化碳的21倍,对生态环境破坏性极强。因此,对煤层赋存的瓦斯进行开发和利用,具有保障生产安全、能源供给和环保的多重意义。
3.对于较长时间没有进行生产的矿井和巷道,其内部安全性能是否依旧可靠是令人怀疑的,直接人工下井进行相关监测可能存在未知的安全问题。对于已经进行过严密的封闭措施的矿井,受到覆岩围压或矿井水位回弹压力等,也极有可能产生瓦斯气体积聚,如果存在地裂缝或有较薄弱的通道,瓦斯可能会出现涌现现象,极易导致安全事故的发生。因此,尽管煤矿可能已经废弃并封闭,但瓦斯动态监测工作仍需持续进行。
技术实现要素:
4.本发明的目的在于提供一种关闭煤矿瓦斯泄漏监测及灾害防控方法及系统,实现对矿井、巷道的瓦斯监测,提高安全性。
5.为了达到上述目的,本发明的基础方案为:一种关闭煤矿瓦斯泄漏监测及灾害防控方法,包括如下步骤:
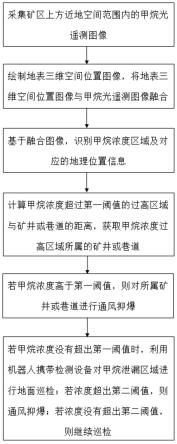
6.s1,采集矿区上方近地空间范围内的甲烷光遥测图像;
7.s2,绘制地表三维空间位置图像,将地表三维空间位置图像与甲烷光遥测图像融合;
8.s3,基于融合图像,识别甲烷浓度区域及对应的地理位置信息;
9.s4,计算甲烷浓度超过第一阈值的过高区域与矿井或巷道的距离,获取甲烷浓度过高区域所属的矿井或巷道;
10.s5,若甲烷浓度高于第一阈值,则对所属矿井或巷道进行通风抑爆;
11.s6,若甲烷浓度没有超出第一阈值时,利用机器人携带检测设备对甲烷泄漏区域进行地面巡检;若浓度超出第二阈值,则通风抑爆;若浓度没有超出第二阈值,则继续巡检。
12.本基础方案的工作原理和有益效果在于:利用采集的甲烷光遥测图像与地表三维空间位置图像融合,利于标记甲烷浓度区域,便于查看和后续巡检定位。利用机器人巡检相应区域,进一步核实检测,防止遗漏。且根据阈值浓度判断甲烷泄漏的严重程度,从而采取对应措施,以便及时排查,并通风抑爆,避免甲烷泄漏导致安全事故发生。
13.进一步,图像融合的方法为:
14.获取甲烷光遥测图像和地表三维空间位置图像;
15.在地表三维空间位置图像上标注矿井和巷道位置,提取甲烷光遥测图像的图像特征,所述图像特征包括甲烷泄露地点的位置和浓度信息;
16.将甲烷泄露地点的位置和浓度信息显示在所述地表三维空间位置图像上。
17.操作简单,便于使用。
18.进一步,巡检时地面机器人的巡检方法为:
19.获取实时检测的非超标的甲烷泄漏点地图;
20.对甲烷泄漏浓度进行分级,分为n级;
21.从浓度最高等级的甲烷泄漏点开始,建立目标函数和约束条件,逐级求解目标函数进行路径规划:
[0022][0023]
其中,d是目标函数,n为选择的甲烷泄漏区域数量,i、j为泄漏点;α1、α2为权重因子,α1》0.5,α2《0.5;ρ
j测
为j泄漏点的甲烷浓度,ρ
标
为参照标准安全浓度;t
标
为参考标准距离时间,t
ij
为自i泄漏点到j泄漏点的时间;x
ij
为自i泄漏点到j泄漏点的移动距离,
[0024]
从i移动到j点为1,其他为0;
[0025]
路过i,j点的次数只有1次。
[0026]
利用目标函数和约束条件对地面机器人的巡检路径进行规划,便于操作。
[0027]
进一步,求解目标函数的方法为基于遗传算法,或粒子群算法,或蚁群算法或神经网络算法。
[0028]
根据需要选取合适的算法进行目标函数求解,利于使用。
[0029]
进一步,利用蚁群算法求解目标函数,具体步骤为:
[0030]
初始蚂蚁群开始构建路径,蚂蚁为检测机器人;
[0031]
根据蚂蚁k从当前节点i到下一节点j的概率选择下一节点;
[0032]
每次完成一个可行方案都对该方案中的路径进行信息素a
ij
的更新;
[0033]
求目标函数,记录当前最优方案,进行下一次迭代,
[0034][0035][0036]
其中,a
ij
为链路i
→
j的信息素浓度,b
ij
为链路i
→
j的启发式信息;若ρj》ρi,转移至b
ij
最大的点,若ρj《ρi,转移至b
ij
最小的点;
[0037]
信息素局部更新的方法如下:
[0038]
更新选中的点的信息素:
[0039][0040]
未选中的点的信息素:
[0041][0042]
其中,l
标
为距离标准,l
ij
为i至j的距离;
[0043]
直至迭代蚁群算法至最大迭代次数。
[0044]
运算流程简单,便于使用。
[0045]
进一步,对甲烷泄漏区域的第1至n级泄露点进行巡检,1级为最高等级,n级为最低等级,完成高一级再对低一级进行巡检,n为不大于n的正整数;
[0046]
阶段性更新,更新后从最高一级的泄露点进行巡检。
[0047]
对甲烷泄漏区域的泄漏点等级进行划分,便于依次有序巡检。
[0048]
进一步,通风抑爆方法如下:
[0049]
实时检测矿井内瓦斯浓度、气压、温度和氧气含量;
[0050]
依据矿井内瓦斯浓度、气压、温度、氧气含量进行防控,所述防控方法采用主动抽采和被动抑爆相结合的方法,所述主动抽采至少采用抽气方式和抽水方式之一进行防控,所述被动抑爆至少采用喷雾抑爆方式和注惰抑爆方式之一进行防控,具体方法为:
[0051]
若矿井内甲烷浓度不超标、温度和氧含量在安全范围、而气压压力高于压力阈值时,则抽水和/或抽气;
[0052]
若矿井内甲烷浓度超标且温度和氧含量在安全范围时,当气压压力低于压力阈值,则抽气,当气压压力高于压力阈值,则进行抽气和/或抽水;
[0053]
若矿井内甲烷浓度超标、温度低于温度阈值且氧含量在安全范围时,当气压压力低于压力阈值,则抽气,当气压压力高于压力阈值,则进行抽气和/或抽水;
[0054]
若矿井内甲烷浓度超标且温度高于温度阈值且氧含量在安全范围时,当气压压力低于压力阈值,则抽气且喷雾,若气压压力高于压力阈值,则进行抽气、抽水和喷雾;
[0055]
若矿井内甲烷浓度超标、温度低于温度阈值、氧含量高于安全范围时,当气压压力低于压力阈值,则抽气并注入惰性气体,当气压压力高于压力阈值,则进行抽气和抽水并注入惰性气体;
[0056]
若矿井内甲烷浓度超标、温度高于温度阈值、氧含量高于安全范围时,当气压压力低于压力阈值,则抽气、喷雾并注入惰性气体,若气压压力高于压力阈值,则进行抽气、抽水、喷雾和注入惰性气体。
[0057]
抽气以排除瓦斯,从根本上排出可燃物,减少泄漏绝对量;抽水以控制矿井内压力,控制从地面裂隙泄漏瓦斯的速度;喷雾抑爆以切断点火源,不至于引爆高浓度瓦斯;注入惰性气体以隔绝氧气,防爆。采用主动抽采和被动抑爆相结合的方法来防控关闭矿井瓦斯泄漏,减小瓦斯泄漏和防爆,提高关闭矿井的安全性。
[0058]
进一步,依据矿井内瓦斯浓度、气压、温度、氧气含量进行防控的具体方法为:
[0059]
f=(f(η) f(p)) 100f(o
x
) 1000f(t)
[0060]
其中,
[0061][0062][0063][0064]
其中,η为检测的瓦斯浓度,η
标
为瓦斯浓度安全阈值,p为检测的气压值,p
标
为气压安全阈值,o
x
为检测的含氧量,o
x标
为含氧量浓度安全阈值,t为检测的温度,t
标
为安全温度阈值;
[0065]
当f的数值大于2且小于10时,采用抽气方式和/或抽水方式进行防控;
[0066]
当f数值大于10且小于100,采用抽气方式和/或抽水方式、以及注惰抑爆方式;
[0067]
当f数值大于100,采用抽气方式和/或抽水方式、以及喷雾抑爆方式和/或注惰抑爆方式。
[0068]
防灾设备包括主动抽采设备和被动抑爆设备,主动抽采设备包括抽气设备和抽水设备,被动抑爆设备包括喷雾抑爆设备和注惰抑爆设备;依据本技术提供的防控方法进行防控,操作简单,便于使用。
[0069]
本发明还提供一种关闭煤矿瓦斯泄漏监测及灾害防控系统,包括对空检测模块和对地检测模块,所述对空检测模块用于采集矿区上方近地空间范围内的甲烷光遥测图像,对空检测模块的输出端与对地检测模块的输入端连接,所述对地检测模块执行本发明所述的方法,进行泄漏监控。
[0070]
该系统实现对矿区所在区域的甲烷监测,利于安全防护,无人机采集,便于快速处理危险地区。
[0071]
进一步,所述对空检测模块包括无人机和甲烷激光遥测仪,所述甲烷激光遥测仪安装在无人机上。
[0072]
构造简单,利于制造、使用。
附图说明
[0073]
图1是本发明关闭煤矿瓦斯泄漏监测及灾害防控方法的流程示意图;
[0074]
图2是本发明关闭煤矿瓦斯泄漏监测及灾害防控系统的结构示意图。
[0075]
说明书附图中的附图标记包括:矿井10、封堵11、水淹线12、煤层20、地表层30、裂
隙31、传感器组40、抽气设备50、抽气泵51、抽气管52、抽水设备60、抽水泵61、抽水管62、喷雾抑爆设备70、水管71、加压泵72、输水管73、雾化喷头74、喷雾阀75、注惰抑爆设备80、储气罐81、气泵82、输气管83。
具体实施方式
[0076]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0077]
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0078]
在本发明的描述中,除非另有规定和限定,需要说明的是,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,也可以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
[0079]
本发明公开了一种关闭煤矿瓦斯泄漏监测及灾害防控方法,如图1所示,包括如下步骤:
[0080]
s1,采集矿区上方近地空间范围内的甲烷光遥测图像;
[0081]
s2,绘制地表三维空间位置图像,将地表三维空间位置图像与甲烷光遥测图像融合;
[0082]
s3,基于融合图像,识别甲烷浓度区域及对应的地理位置信息;
[0083]
s4,计算甲烷浓度超过第一阈值的过高区域与矿井或巷道的距离,获取甲烷浓度过高区域所属的矿井或巷道;
[0084]
s5,若甲烷浓度高于第一阈值,则对所属矿井或巷道进行通风抑爆;
[0085]
s6,若甲烷浓度没有超出第一阈值时,利用机器人携带检测设备对甲烷泄漏区域进行地面巡检;若浓度超出第二阈值,则通风抑爆;若浓度没有超出第二阈值,则继续巡检。
[0086]
本发明的一种优选方案中,图像融合的方法为:
[0087]
获取甲烷光遥测图像和地表三维空间位置图像;
[0088]
在地表三维空间位置图像上标注矿井和巷道位置,提取甲烷光遥测图像的图像特征,所述图像特征包括甲烷泄露地点的位置和浓度信息;
[0089]
将甲烷泄露地点的位置和浓度信息显示在所述地表三维空间位置图像上。
[0090]
本发明的一种优选方案中,巡检时地面机器人的巡检方法为:
[0091]
获取实时检测的非超标(即未超过第一阈值)的甲烷泄漏点地图;
[0092]
对甲烷泄漏浓度进行分级,分为n级;
[0093]
从浓度最高等级的甲烷泄漏点开始,建立目标函数和约束条件,逐级求解目标函数进行路径规划:
[0094][0095]
其中,d是目标函数,n为选择的甲烷泄漏区域数量,i、j为泄漏点;α1、α2为权重因子,α1》0.5,α2《0.5;ρ
j测
为j泄漏点的甲烷浓度,ρ
标
为参照标准安全浓度;t
标
为参考标准距离时间,t
ij
为自i泄漏点到j泄漏点的时间;x
ij
为自i泄漏点到j泄漏点的移动距离,约束条件:
[0096]
从i移动到j点为1,其他为0;
[0097]
路过i,j点的次数只有1次。
[0098]
本发明的一种优选方案中,求解目标函数的方法为基于遗传算法,或粒子群算法,或蚁群算法或神经网络算法。
[0099]
更优选地,利用蚁群算法求解目标函数,具体步骤为:
[0100]
初始蚂蚁群开始构建路径,蚂蚁为检测机器人;
[0101]
根据蚂蚁k从当前节点i到下一节点j的概率选择下一节点;
[0102]
每次完成一个可行方案都对该方案中的路径进行信息素a
ij
的更新;
[0103]
求目标函数,记录当前最优方案,进行下一次迭代,
[0104][0105][0106]
其中,a
ij
为链路i
→
j的信息素浓度,b
ij
为链路i
→
jj的启发式信息;若ρj》ρi,转移至b
ij
最大的点,若ρj《ρi,转移至b
ij
最小的点;
[0107]
信息素局部更新的方法如下:
[0108]
更新选中的点的信息素:
[0109][0110]
未选中的点的信息素:
[0111][0112]
其中,l
标
为距离标准,l
ij
为i至j的距离;
[0113]
直至迭代蚁群算法至最大迭代次数。
[0114]
本发明的一种优选方案中,对甲烷泄漏区域的第1至n级泄露点进行巡检,1级为最高等级,n级为最低等级,完成高一级再对低一级进行巡检,n为不大于n的正整数;
[0115]
阶段性更新,更新后从最高一级的泄露点进行巡检。
[0116]
本发明的一种优选方案中,通风抑爆方法如下:
[0117]
实时检测矿井内瓦斯浓度、气压、温度和氧气含量;
[0118]
依据矿井内瓦斯浓度、气压、温度、氧气含量进行防控,所述防控方法采用主动抽采和被动抑爆相结合的方法,所述主动抽采至少采用抽气方式和抽水方式之一进行防控,所述被动抑爆至少采用喷雾抑爆方式和注惰抑爆方式之一进行防控,具体方法为:
[0119]
若矿井内甲烷浓度不超标、温度和氧含量在安全范围、而气压压力高于压力阈值时,应采取降低矿井气压的方式,则抽水和/或抽气,将矿井中气压降至安全压力阈值以下,减少甚至避免瓦斯泄露;
[0120]
若矿井内甲烷浓度超标且温度和氧含量在安全范围时,当气压压力低于压力阈值,则抽气,以排出矿井内的瓦斯,将瓦斯浓度降低至安全阈值以下;当气压压力高于压力阈值,则进行抽气和/或抽水,将矿井中气压降至安全压力阈值以下;
[0121]
若矿井内甲烷浓度超标、温度低于温度阈值且氧含量在安全范围时,当气压压力低于压力阈值,则抽气,还可注入惰性气体,排出瓦斯的同时隔绝氧气防爆;当气压压力高于压力阈值,则进行抽气和/或抽水,还可注入惰性气体,排出瓦斯、控制矿井内压力的同时隔绝氧气防爆;
[0122]
若矿井内甲烷浓度超标且温度高于温度阈值且氧含量在安全范围时,当气压压力低于压力阈值,则抽气且喷雾,排出瓦斯的同时切断点火源;若气压压力高于压力阈值,则进行抽气、抽水和喷雾,排出瓦斯、控制矿井内压力的同时切断点火源;
[0123]
若矿井内甲烷浓度超标、温度低于温度阈值、氧含量高于安全范围时,当气压压力低于压力阈值,则抽气并注入惰性气体,排出瓦斯、隔绝氧气防爆;当气压压力高于压力阈值,则进行抽气和抽水并注入惰性气体;
[0124]
若矿井内甲烷浓度超标、温度高于温度阈值、氧含量高于安全范围时,当气压压力低于压力阈值,则抽气、喷雾并注入惰性气体,排出瓦斯、切断点火源的同时隔绝氧气防爆;若气压压力高于压力阈值,则进行抽气、抽水、喷雾和注入惰性气体,排出瓦斯、控制矿井内压力切断点火源的同时隔绝氧气防爆。
[0125]
抽气以排除瓦斯,从根本上排出可燃物,减少泄漏绝对量;抽水以控制矿井内压力,控制从地面裂隙泄漏瓦斯的速度;喷雾抑爆以切断点火源,不至于引爆高浓度瓦斯;注入惰性气体以隔绝氧气,防爆。采用主动抽采和被动抑爆相结合的方法来防控关闭矿井瓦斯泄漏,减小瓦斯泄漏和防爆,提高关闭矿井的安全性。在本实施例中,抽气方式是通过设置抽气设备抽出矿井、地面裂隙和煤层裂隙中的瓦斯;抽水方式是通过设置抽水设备抽出煤层矿井中的水;喷雾抑爆方式是通过设置喷雾抑爆设备喷出水雾以切断点火源;注惰抑爆方是通过设置注惰抑爆设备向矿井中注入惰性气体。矿井内存在煤层20、地表层30等。
[0126]
本发明的一种优选方案中,依据矿井内瓦斯浓度、气压、温度、氧气含量进行防控的具体方法为:
[0127]
f=(f(η) f(p)) 100f(o
x
) 1000f(t)
[0128]
其中,
[0129][0130][0131][0132]
其中,η为检测的瓦斯浓度,η
标
为瓦斯浓度安全阈值,p为检测的气压值,p
标
为气压安全阈值,o
x
为检测的含氧量,o
x标
为含氧量浓度安全阈值,t为检测的温度,t
标
为安全温度阈值;
[0133]
当f的数值大于2且小于10时,采用抽气方式和/或抽水方式进行防控;
[0134]
当f数值大于10且小于100,采用抽气方式和/或抽水方式、以及注惰抑爆方式;
[0135]
当f数值大于100,采用抽气方式和/或抽水方式、以及喷雾抑爆方式和/或注惰抑爆方式。
[0136]
防灾设备包括主动抽采设备和被动抑爆设备,主动抽采设备包括抽气设备和抽水设备,被动抑爆设备包括喷雾抑爆设备和注惰抑爆设备;依据本技术提供的防控方法进行防控,操作简单,便于使用。本发明还提供一种关闭煤矿瓦斯泄漏监测及灾害防控系统,包括对空检测模块和对地检测模块,对空检测模块用于采集矿区上方近地空间范围内的甲烷光遥测图像,对空检测模块的输出端与对地检测模块的输入端连接,对地检测模块执行本发明所述的方法,进行泄漏监控。对空检测模块包括无人机和甲烷激光遥测仪,所述甲烷激光遥测仪安装在无人机上。
[0137]
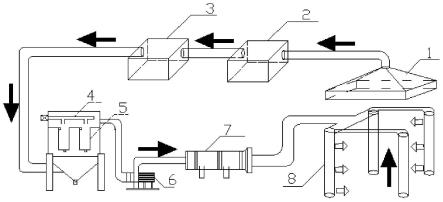
关闭煤矿瓦斯泄漏监测及灾害防控,在一种优选实施方式中,如图2所示,该防控系统包括传感器组40、控制器及防灾设备,传感器组40用于实时检测矿井10内瓦斯浓度、气压、温度和氧气含量并传输给控制器,防灾设备包括主动抽采设备和被动抑爆设备,主动抽采设备包括抽气设备50和抽水设备60,被动抑爆设备包括喷雾抑爆设备70和注惰抑爆设备80,控制器依据实施例一的防控方法进行防控。
[0138]
在本实施例中,传感器组40包括设在矿井10内的瓦斯浓度传感器、温度传感器、气压传感器和氧气含量传感器,传感器组40还包括用于检测地面裂隙瓦斯溢出量的传感器,使得该防控系统可根据地面裂隙处的瓦斯溢出量来选择具体的防控方法。
[0139]
在本实施例中,抽气设备50包括抽气泵51和与抽气泵51入口连接的抽气管52,抽气泵51设在矿井10外,抽气管52穿过封堵11而插入矿井10中。抽气泵51工作,抽气泵51通过抽气管52将矿井10中的瓦斯抽出,与矿井相通的煤层裂隙和地面裂隙中的瓦斯也会被抽出。
[0140]
在本实施例中,抽水设备60包括抽水泵61和与抽水泵61入口连接的抽水管62,抽水泵61设在矿井10外,抽水管62穿过封堵11而插入矿井10中的水淹线12以下,将矿井10内的水抽出,以控制矿井10内的气压,控制瓦斯从裂隙31泄漏的速度。
[0141]
在本实施例中,喷雾抑爆设备70包括通过水管71与水源连接的加压泵72,水源可以是水库、水龙头或者水箱,加压泵72设在矿井10外,加压泵72的出口连接有输水管73,输水管73连接有若干沿其长度方向间隔设置的雾化喷头74。输水管73的数量为多根,多根输水管73并联设置,每根输水管73是均设有雾化喷头74,每根输水管73上均设有控制通道的喷雾阀75,喷雾阀75位于雾化喷头74的上游。根据实际情况,将输水管73铺设在地面裂隙处和插入矿井10中。
[0142]
需要说明的是,喷雾抑爆设备70也可采用现有的其他结构,比如喷雾抑爆设备包括通过水管与水源连接的雾化泵,雾化泵的出口连接有输送管,水经雾化泵雾化,输送管排出水雾以切断点火源;又比如喷雾抑爆设备包括通过水管与水源连接的加压泵、以及与加压泵连接的超声波雾化器,超声波雾化器的出口连接有输送管,水由加压泵输送,并由超声波雾化器雾化,输送管排出水雾以切断点火源。
[0143]
在本实施例中,注惰抑爆设备80包括储存惰性气体的储气罐81、与储气罐81连接的输送惰性气体的气泵82、以及与气泵82连接的输气管83,储气罐81和气泵82设在矿井10外,输气管83穿过封堵11而插入矿井10中。惰性气体进入矿井10中,并通过矿井10进入煤层裂隙和地面裂隙以隔绝氧气。
[0144]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0145]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。