1.本发明涉及工业信息安全技术领域,具体涉及一种机器人集群系统安全接入系统、方法及计算机可读取介质。
背景技术:
2.安全问题是机器人集群系统的重要研究方向之一,譬如军事、公共基础设施等的数据信息安全性、任务执行安全性不容忽视。在机器人集群系统中,机器人是集群系统的基本组成单元,比如无人机集群系统中的无人机,中央控制器是集群系统的总控制单元。对待加入机器人集群系统中的机器人或中央控制器进行篡改或将恶意机器人或者中央控制器接入机器人集群系统将对机器人集群系统构成严重的安全威胁,例如将一个机器人篡改作为敌意机器人重新投入到机器人集群系统中,攻击者可以利用该机器人影响机器人集群系统的决策,导致系统行为偏离或者任务失败,甚至执行有危害性的操作。
3.现有技术中的安全接入系统和方法,在认证过程中容易被欺骗,导致认证识别度低。
技术实现要素:
4.鉴于上述分析,本发明实施例旨在提供一种机器人集群系统安全接入系统、方法及计算机可读取介质,用以解决现有认证识别度低、安全性低的问题。
5.机器人集群系统的控制方式有三种:集中式控制,分布式控制和混合式控制。集中式控制的机器人集群系统是通过系统中央控制器与集群中所有执行操作任务的操作设备通信组成网络来发布任务和接收数据;分布式控制的机器人集群是通过集群系统中的执行操作任务的操作设备与其临近的执行操作任务的操作设备(即:临近操作设备)之间通信来传递任务和接收数据;混合式控制的机器人集群系统时结合了上两种控制方式。其中,机器人为执行操作任务的操作设备或中央控制器。
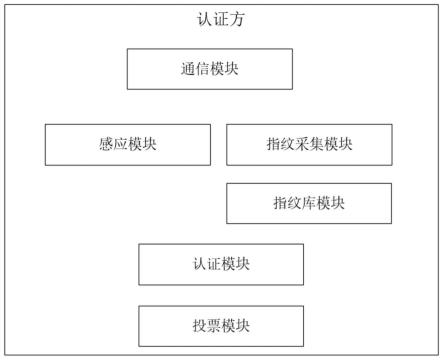
6.本发明提供了一种机器人集群系统安全接入系统,用于对待接入的机器人进行安全接入机器人集群系统提供安全认证,包括通信模块、指纹采集模块、指纹库模块、认证模块和投票模块;
7.通信模块,用于与机器人集群系统中的机器人和待接入的机器人的通信连接并传输数据和指令;
8.指纹采集模块,用于对机器人集群系统中的机器人进行指纹采集;以及对待接入的机器人进行指纹采集;
9.指纹库模块,用于录入指纹采集模块采集到的机器人集群系统中的机器人的指纹;
10.认证模块,用于对指纹采集模块采集到的待接入的机器人指纹与指纹库模块中指纹进行匹配,并给出匹配结果;投票模块,用于收集对待接入的机器人进行的判定结果,并根据收集的判定结果对待接入的机器人进行赋权。
11.进一步地,还包括感应模块,用于对机器人集群系统中的机器人进行指纹采集;以及对待接入的机器人进行指纹采集。
12.进一步地,指纹库模块还用于录入感应模块采集到的机器人集群系统中的机器人的指纹;认证模块还用于初步比对通过指纹采集模块采集到的和通过感应模块采集到的待接入的机器人指纹,并给出初步比对结果。
13.进一步地,机器人集群系统安全接入系统为设置于机器人集群系统中的机器人或第三方监控平台。
14.本发明还提供了一种机器人集群系统安全接入方法,具体步骤如下:
15.s1、注册阶段,对机器人集群系统中的机器人进行采集指纹和录入指纹;
16.s2、认证阶段,对待接入的机器人进行指纹采集,并与s1中采集的机器人集群系统中的机器人指纹进行指纹匹配,如果匹配成功,进入下一步,匹配不成功则断连并报警;
17.s3、投票阶段,收集判定结果,根据收集的判定结果进行投票,如果投票结果大于或等于阈值时,判定待接入的机器人合法,则赋权待接入的机器人接入机器人集群系统,进入下一步;如果投票结果小于阈值时,判定待接入的机器人不合法,则拒绝待接入的机器人接入机器人集群系统,并报警;
18.s4、运行,接入认证成功后,待接入的机器人进入机器人集群系统正常工作。
19.进一步地,s1的具体步骤如下:
20.s11、采集指纹,采集机器人集群系统中所有机器人的指纹;
21.s12、录入指纹,将采集到的机器人集群系统中的机器人的指纹录入到指纹库模块中。
22.进一步地,s2的具体步骤如下:
23.采集待接入的机器人的指纹;
24.指纹库匹配,将采集到的待接入的机器人指纹与指纹库模块中指纹匹配;匹配成功则进入下一步,匹配不成功则断连报警。
25.进一步地,s2还包括如下步骤:
26.比对指纹:指纹采集元件设置多个,将通过多个指纹采集元件采集到的待接入的机器人指纹之间进行初步比对,比对成功则进入下一步,比对不成功则断连报警;比对指纹步骤设置于步骤s2中采集待接入的机器人的指纹步骤和指纹库匹配步骤之间。
27.进一步地,s3的具体步骤如下:
28.s31、收集认证信息,对待接入的机器人接入机器人集群系统的接入请求进行判定并获得判定结果,判定结果构成认证信息;
29.s31、赋权,根据收集的认证结果进行投票,如果投票结果大于或等于阈值时,判定待接入的机器人合法,则赋权待接入的机器人接入机器人集群系统;如果投票结果小于阈值时,判定待接入的机器人不合法,则拒绝待接入的机器人接入机器人集群系统,并报警。
30.本发明还提供了一种计算机可读取介质,其上存储有计算机程序指令,该指令被处理器执行时实现前述的机器人集群系统安全接入方法。
31.与现有技术相比,本发明至少可实现如下有益效果之一:
32.(1)本发明能够在操作设备和操作设备之间或者操作设备与中央控制器之间或者操作设备与第三方监控平台之间或者中央控制器与第三方监控平台之间建立基于机器人
指纹的安全通信和接入的认证机制,认证过程方便高效且认证的安全性高。
33.(2)本发明通过机器人的指纹进行认证,机器人指纹具有唯一性和永久性,使得认证结果具有认证识别度高、安全性高的特点。
34.(3)本发明同时通过指纹采集模块和感应模块采集指纹,使得采集的指纹更具有完整性,并能从多个视角判断指纹的有效性。
35.(4)本发明采用了指纹初步比对,直接将待认证的机器人自身的指纹进行自检,特别是重合部分的信息对比,增加指纹判断的效率。
36.(5)本发明的投票阶段设置临近机器人进行第三角度评判打分,使得认证不受单个认证方设备判断的误导,能够避免机器人集群系统中或者第三方监控平台可能存在的少数恶意节点对机器人通信安全认证的干扰,增加了机器人认证的可靠性。
附图说明
37.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制。
38.图1为本发明的机器人集群系统安全接入系统的结构框图;
39.图2本发明的认证方和被认证方接入信息流向图;
40.图3本发明的认证方和被认证方接入的流程图。
具体实施方式
41.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
42.第一方面,本发明公开了一种机器人集群系统安全接入系统,如图1,用于对待接入的机器人进行安全接入机器人集群系统提供安全认证,为认证方;包括通信模块、指纹采集模块、指纹库模块(即:机器人指纹库)、认证模块和投票模块。其中,机器人为执行操作任务的操作设备或中央控制器。
43.进一步地,还包括感应模块。
44.进一步地,认证方为机器人集群系统中的机器人或第三方监控平台。
45.其中,通信模块,用于与机器人集群系统中的机器人和待接入的机器人的通信连接并传输数据和指令。
46.指纹采集模块,用于在机器人集群系统执行任务之前,对机器人集群系统中的机器人进行指纹采集;以及对待接入的机器人进行指纹采集。
47.感应模块,用于在机器人集群系统执行任务之前,对机器人集群系统中的机器人进行指纹采集;以及对待接入的机器人进行指纹采集。
48.指纹库模块,用于在机器人集群系统执行任务之前,录入指纹采集模块和/或感应模块采集到的机器人集群系统中的机器人的指纹。
49.认证模块,用于初步比对通过指纹采集模块采集到的和通过感应模块采集到的待接入的机器人指纹,并给出初步比对结果,比对成功则进行机器人指纹匹配,比对不成功则断连报警;和/或对指纹采集模块采集到的和/或通过感应模块采集到的待接入的机器人指纹与指纹库模块中指纹进行匹配,并给出匹配结果,匹配成功则进行投票,匹配不成功则断连报警。
50.投票模块,用于收集临近机器人对待接入的机器人进行的认证信息和认证方对待
接入的机器人进行的判定结果,并根据收集的认证信息和判定结果对待接入的机器人进行赋权。其中,临近机器人是指以待接入的机器人为中心,与该待接入的机器人在一定有效通信距离内的其他机器人。
51.可选地,所述机器人的指纹是指机器人的硬件或软件固有信息或它们的组合,将该信息的部分或全部组合视为机器人的唯一标识;所述硬件固有信息包括设备id、cpu型号、内存型号、内存大小、网卡接口类型、传感器型号、设备外观形态和/或颜色等;所述软件固有信息包括软件固件版本、运行周期和/或应用程序版本等。
52.另一方面,本发明还公开了一种机器人集群系统安全接入方法,如图2-3,采用前述机器人集群系统安全接入系统进行安全认证,具体步骤如下:
53.s1、注册阶段,在机器人集群系统执行任务之前,认证方对机器人集群系统中的机器人进行采集指纹和录入指纹。可选地,注册阶段在机器人集群系统出厂时,执行任务之前进行。
54.s11、采集指纹,认证方通过指纹采集模块和/或感应模块采集机器人集群系统中所有的机器人的指纹;通过两种方式多角度采集机器人集群系统中机器人的指纹,在做认证时能够从多维度进行认证,提高认证准确性,并且两种方式采集的指纹有重合之处,重合的部分能够进一步提高认证的准确性。
55.s12、录入指纹,认证方将采集到的机器人集群系统中的机器人的指纹录入到指纹库模块中。
56.其中,指纹采集时,认证方的通信模块通过指纹采集软件向机器人集群系统中的机器人发送指纹采集指令,所述机器人将自身指纹信息反馈给指纹采集模块;感应模块通过指纹采集元件采集机器人集群系统中的机器人的指纹,优选地,指纹采集元件为传感器。
57.s2、认证阶段,认证方对待接入机器人集群系统中的待接入的机器人(即:被认证方)进行指纹采集和指纹匹配。
58.s21、待接入的机器人指纹采集,待接入的机器人与认证方建立通信连接,认证方采集待接入的机器人的指纹;
59.所述待接入的机器人与认证方建立通信连接是指待接入的机器人与认证方建立通信物理连接,采用相同的通信协议,物理层正常工作,成功握手;
60.成功握手后,认证方的通信模块向待接入的机器人发送指纹采集指令,待接入的机器人将自身指纹反馈给认证方的指纹采集模块;和/或通过认证方的感应模块采集待接入的机器人指纹。
61.s22、比对指纹:如果认证方设置有感应模块,认证方将通过指纹采集模块采集到的和通过感应模块采集到的待接入的机器人指纹在认证方的认证模块进行初步比对,比对成功则进入机器人指纹库匹配步骤,比对不成功则断连报警。通过两种方式多角度采集待接入的机器人的指纹,在做比对时能够从多维度进行比对,提高比对准确性,并且两种方式采集的指纹有重合之处,使用重合的部分作用于初步对比步骤,能够进一步提高认证的准确性。
62.s23、指纹库匹配,将指纹采集模块采集到的和/或通过感应模块采集到的待接入的机器人指纹与指纹库模块中指纹匹配;匹配成功则进入投票阶段,匹配不成功则断连报警。
63.s3、投票阶段,收集认证结果和/或判定结果构成的认证信息,根据收集的认证信息进行投票和赋权。
64.s31、收集认证信息,机器人集群系统中的临近机器人对待接入的机器人进行信息采集并获得认证结果;认证方对待接入的机器人进行判定并获得判定结果;将认证结果和/或判定结果构成的认证信息反馈给认证方进行投票;优选地,采用机器人集群系统中的多个临近机器人对待接入的机器人进行信息采集并获得认证结果;
65.s32、赋权,根据收集的认证信息进行投票,如果投票结果大于或等于阈值时,判定待接入的机器人合法,则赋权待接入的机器人接入机器人集群系统;如果投票结果小于阈值时,判定待接入的机器人不合法,则拒绝待接入的机器人接入机器人集群系统,并报警。
66.其中,临近机器人的信息采集包括临近机器人对待接入的机器人的指纹判断、临近机器人对待接入机器人是否属于机器人集群系统的判断和临近机器人对待接入机器人在机器人集群系统中的角色的判断,并根据该所述判断做出认证结果,如果符合临近机器人对待接入机器人的判断标准,则通过,认证结果为1,若果不符合,则不通过,认证结果为0;认证方对待接入的机器人进行判定包括对待接入的机器人提出的接入机器人集群系统的任务请求的通过判断,如果认证方判断可以接入,则判定结果为1,如果不能接入,则判定结果为0。
67.其中,投票结果为临近机器人的认证结果(即:1或者0)
×
临近的机器人权值 认证方的判定结果(即:1或者0)
×
认证方权值。权值通过设计机器人集群系统的专家或者工程师确定,根据机器人和认证方在机器人集群系统中的角色和能力赋予不同权重。
68.s4、运行,接入认证成功后,待接入的机器人进入机器人集群系统正常工作。
69.第三方面,本发明还公开了一种计算机可读取介质,其上存储有计算机程序指令,该指令被处理器执行时实现机器人集群系统安全接入方法对应实施例中的方法的步骤。本领域内的技术人员应该明白,本发明的实施例可提供为方法、装置或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用非瞬时性存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
70.为了方便理解本发明的上述技术方案,以下通过具体的实施例1和对本发明的上述技术方案进行详细说明。
71.实施例1
72.在一个战场环境下需要机器人(执行操作任务的操作设备可以是无人机或者自主移动的机械设备)集群系统执行目标搜索任务或者构建地图任务,期间不可避免的会因为环境干扰或者系统故障发生自重启等状况,出现机器人集群系统中一个或多个机器人通信失联,后又重新请求通信接入机器人集群系统。为了保证机器人集群系统的通信接入安全,避免敌方机器人混入我方机器人集群系统造成信息泄露、任务偏航或失败,可以部署本发明——机器人集群系统安全接入系统、方法及计算机可读取介质。具体的部署以及使用方法如下:
73.注册:机器人集群系统在执行任务之前,通过管理员或者操作配置,用机器人指纹采集软件采集机器人集群系统中所有机器人指纹;再将采集的机器人指纹录入到机器人集
群系统或者第三方监控平台的指纹库,录入成功结束当前注册。
74.认证:机器人集群系统执行搜索任务途中,部分机器人失联(即:被认证机器人),失联机器人在重新请求连接机器人集群系统时,机器人集群系统中负责认证的机器人(一般是距离被认证机器人较近的执行操作任务的操作设备或中央控制器)或者第三方监控平台启动认证阶段步骤。
75.第一步认证机器人或第三方监控平台和被认证机器人通信握手;
76.第二步认证机器人或第三方监控平台采集被认证机器人的机器人指纹;
77.第三步认证机器人或第三方监控平台将采集的被认证机器人指纹进行初步比对,没有冲突则进入下一步,否则不通过认证并报警;
78.第四步认证机器人或第三方监控平台将采集的被认证机器人指纹和存储在机器人集群系统或第三方监控平台的指纹库中进行匹配,匹配成功则进入投票阶段,否则不通过认证并报警;
79.第五步投票:认证阶段通过后,通过临边机器对被认证机器人的认证结果和/或认证机器人或第三方监控平台对被认证机器人的判定结果,构成投票系统。如果投票通过数大于或等于阈值,则通过认证;如果投票通过数小于阈值,则不通过认证并报警。
80.第六步通过认证,认证机器人或第三方监控平台赋予被认证机器人权限并接入机器人集群系统运行。
81.实施例2
82.基于实施例1中的在一个战场环境下的机器人集群系统,期间需要增加新的机器人进入该机器人集群系统,在需要增加的新的机器人出厂时,请求进入该机器人集群系统前,进行注册阶段,将自身的指纹注册如该机器人集群系统。其他操作步骤与实施例1相同,在此不再赘述,最后根据投票结果认证是否能够接入该机器人集群系统。
83.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。