技术特征:
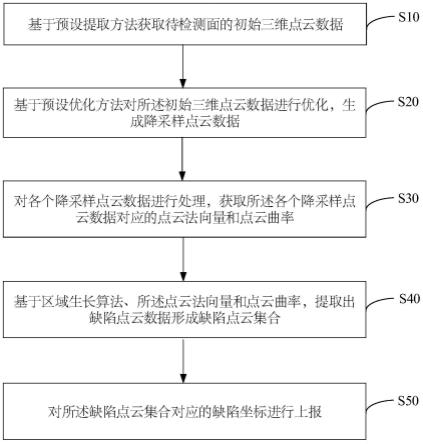
1.一种顶盖焊点云缺陷检测方法,其特征在于,所述方法包括以下步骤:基于预设提取方法获取待检测面的初始三维点云数据;基于预设优化方法对所述初始三维点云数据进行优化,生成降采样点云数据;对各个降采样点云数据进行处理,获取所述各个降采样点云数据对应的点云法向量和点云曲率;基于区域生长算法、所述点云法向量和点云曲率,提取出缺陷点云数据形成缺陷点云集合;对所述缺陷点云集合对应的缺陷坐标进行上报。2.如权利要求1所述的顶盖焊点云缺陷检测方法,其特征在于,所述基于预设优化方法对所述初始数据进行优化,生成降采样点云数据,包括:基于体素滤波算法对所述初始三维点云数据进行优化,获得点云重心数据;基于统计滤波算法对所述点云重心数据进行优化,获得所述降采样点云数据。3.如权利要求1所述的顶盖焊点云缺陷检测方法,其特征在于,所述基于区域生长算法、所述点云法向量和点云曲率,提取出缺陷点云数据形成缺陷点云集合,包括:将多个降采样点云数据组成降采样点云集合,其中,所述降采样点云集合中的每一个点为一个已标签点或无标签点,所述已标签点有一个对应的索引值且不为空值,所述未标签点的索引值为空值;选取所述降采样点云集合中的任一点作为点k,对所述点k进行近邻范围搜索选取随机点n,并判断所述点n是否为所述无标签点;若所述点n为所述无标签点,则基于所述点云法向量和点云曲率对所述点n进行法向量判别和曲率判别;基于所述点n的法向量判别结果和曲率判别结果,确定所述点n是否为缺陷点云数据,直至提取出所述降采样点云集合中的全部缺陷点云数据,作为所述缺陷点云集合。4.如权利要求3所述的顶盖焊点云缺陷检测方法,其特征在于,所述若所述点n为所述无标签点,则基于所述点云法向量和点云曲率对所述点n进行法向量判别和曲率判别,包括;判断所述点n的法向量是否小于第一预设阙值;若所述点n的法向量小于所述第一预设阙值,则判断所述点n的曲率是否小于第二预设阙值;若所述点n的法向量不小于所述第一预设阙值,则对所述点k进行近邻范围搜索选取其余随机点n,并通过所述其余随机点更新所述点n,返回:判断所述点n是否为所述无标签点。5.如权利要求4所述的顶盖焊点云缺陷检测方法,其特征在于,所述若所述点n的法向量小于第一预设阙值,则判断所述点n的曲率是否小于第二预设阙值,包括;当所述点n的法向量小于第一预设阙值,则对所述点n打标签,并根据所述点n的法向量大小,赋予所述点n索引值;判断所述点n的曲率是否小于所述第二预设阙值;若所述点n的曲率小于所述第二预设阙值,则将所述点n加入种子点云数据,并将具有相同索引值的所述点n划为同一类种子点云数据;将各种类种子点云数据按索引值大小进行排序,并将除所述索引值最大的一类种子点
云数据之外的其他类种子点云数据作为缺陷点云数据;根据所述缺陷点云数据生成所述缺陷点云集合。6.如权利要求5所述的顶盖焊点云缺陷检测方法,其特征在于,所述判断所述点n的曲率是否小于第二预设阙值,还包括:若所述点n的曲率不小于第二预设阙值,则对所述点k进行近邻范围搜索选取其余随机点,并通过所述其余随机点更新所述点n,直至完成所述降采样点云集合中的每一个点。7.如权利要求1-6中任一项所述的顶盖焊点云缺陷检测方法,其特征在于,所述基于预设提取方法获取待检测面的初始三维点云数据,包括:通过外置相机、线激光和激光三角提取法,获得所述待检测面的三维点云数据,作为所述初始三维点云数据,其中,所述预设提取方法为所述激光三角提取法。8.一种顶盖焊点云缺陷检测方法装置,其特征在于,所述顶盖焊点云缺陷检测装置包括:初始数据获取模块,用于基于预设提取方法获取待检测面的初始三维点云数据;数据优化模块,用于基于预设优化方法对所述初始三维点云数据进行优化,生成降采样点云数据;数据处理模块,用于对各个降采样点云数据进行处理,获取所述各个降采样点云数据对应的点云法向量和点云曲率;缺陷数据提取模块,用于基于区域生长算法、所述点云法向量和点云曲率,提取出缺陷点云数据形成缺陷点云集合;缺陷坐标上报模块,用于对所述缺陷点云集合对应的缺陷坐标进行上报。9.一种顶盖焊点云缺陷检测方法设备,其特征在于,所述顶盖焊点云缺陷检测设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的顶盖焊点云缺陷检测程序,其中所述顶盖焊点云缺陷检测程序被所述处理器执行时,实现如权利要求1至7中任一项所述的顶盖焊点云缺陷检测方法的步骤。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有顶盖焊点云缺陷检测程序,其中所述顶盖焊点云缺陷检测程序被处理器执行时,实现如权利要求1至7中任一项所述的顶盖焊点云缺陷检测方法的步骤。
技术总结
本发明涉及机器视觉技术领域,本发明提供一种顶盖焊点云缺陷检测方法、装置、设备及存储介质,所述方法基于预设提取方法获取待检测面的初始三维点云数据,再对所述初始数据进行优化,生成降采样点云数据,对所述降采样点云数据进行处理,获取点云法向量和点云曲率,基于区域生长算法提取缺陷点云,最后对缺陷点云对应的缺陷处进行上报。由此,所述方法避免了人工视觉检测精度不足且人工费用高的问题,利用机器视觉的方法获得顶盖焊待检测面的点云,在点云中识别出缺陷凹坑和凸点,提高了待检测面的检测效率和缺陷检测的精度,解决了目前靠人工进行顶盖焊缺陷检测效率低且人工成本高昂的技术问题。昂的技术问题。昂的技术问题。
技术研发人员:陈宇
受保护的技术使用者:厦门微图软件科技有限公司
技术研发日:2022.06.21
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。