技术特征:
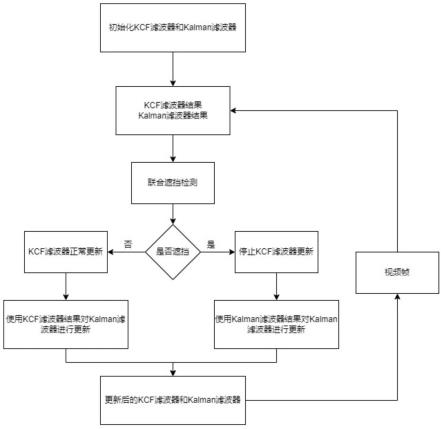
1.一种面向严重遮挡场景的核相关滤波跟踪方法,其特征在于,包括以下步骤:步骤1、初始化kcf滤波器的kcf算法和kalman滤波器的kalman滤波算法,以第一帧的目标位置作为kcf算法和kalman滤波算法的初始位置;步骤2、使用遮挡检测机制判断当前图像中是否发生目标严重遮挡;若否,则采用kcf算法的跟踪结果作为目标物体在当前图像中的位置;若是,则采用kalman滤波算法的跟踪结果作为目标物体在当前图像中的位置;步骤3、根据各自的跟踪结果分别对kalman滤波器和kcf滤波器进行自适应更新;步骤4、读取下一个视频帧,返回执行步骤2;直至跟踪过程结束。2.根据权利要求1所述的一种面向严重遮挡场景的核相关滤波跟踪方法,其特征在于,所述步骤2中,采用联合指标遮挡检测机制处理图像,以判断当前图像中目标是否发生严重遮挡。3.根据权利要求1所述的一种面向严重遮挡场景的核相关滤波跟踪方法,其特征在于,所述联合指标遮挡检测机制为:(1)基于融合特征的相似性判断特征融合指标f使用hsv和lbp特征进行构建,包括:基于kcf算法的检测区域,分别提取目标和背景区域的hsv和lbp特征,并对提取的(hsv
target
,hsv
background
)和(lbp
target
,lbp
background
)使用下述公式进行归一化处理,记待处理的特征向量为x=(x1,x2,...,x
n-1
,x
n
)
t
,归一化后的特征向量为x
*
::在得到归一化的特征向量后,分别计算hsv
target
与hsv
background
的欧氏距离d
hsv
,lbp
target
与lbp
background
的欧氏距离d
lbp
::其中,表示目标的hsv特征向量的第i个分量值,表示目标的lbp特征向量的第i个分量值,表示背景区域的hsv特征向量的第i个分量值,
表示背景区域的lbp特征向量的第i个分量值;指标d用于反应在此特征下,目标和背景之间的区分程度;hsv和lbp在融合特征中的权值计算方式如下:γ
hsv
=1-γ
lbp
通过提取相邻两帧目标特征的hsv和lbp特征,计算得到相第k帧目标的特征相似性和和和其中,hsv
k
和hsv
k-1
表示第k帧和第k-1帧中目标的hsv特征,lbp
k
和lbp
k-1
表示第k帧和第k-1帧中目标的lbp特征;通过权重γ
lbp
和γ
hsv
进行加权求和,得到特征融合f:利用融合特征f进行相似性判断:当执行到第n帧时,首先利用得到的历史相似性距离数据计算平均相似性距离s,并计算相应的阈值th1,计算公式如下:th1=δ1*s(1<δ1<2)其中,δ1表示平均相似性距离s的阈值系数;然后计算第n-1与n帧的目标融合特征的欧式距离f
n
,并判断欧式距离f
n
是否大于th1;若否,则并未发生遮挡;若是,则可能发生遮挡;记是否发生遮挡的指标为ε1,ε1表示为:(2)基于最大响应值的跟踪效果判断使用最大响应值f
max
进行跟踪效果判断,包括:当执行到第n帧时,首先,统计前n-1帧的历史最大响应值信息,计算平均最大响应响应值m和阈值th2,m和th2计算公式如下:th2=δ2*m(0<δ2<1)其中,表示第i帧的最大响应值,δ2表示平均最大响应响应值m的阈值系数;然后,判断第n帧的最大响应值是否大于th2;若是,则当前并未发生遮挡;若否,则
可能发生了遮挡;记是否发生遮挡的指标为ε2,ε2表示为:(3)基于平均相关峰值比的评估机制使用平均相关峰值比apce进行跟踪可信度评估,包括:在响应矩阵基础上,利用平均相关峰值比评估核相关滤波跟踪方法的跟踪效果;apce计算公式如下:其中,f
max
表示当前帧的最大响应值,f
min
表示当前帧的最小响应值;计算前n-1帧的平均和阈值th3,用于评估当前帧,即第n帧的跟踪效果,计算公式如下:如下:其中,δ3表示平均相关峰值比的阈值系数;判断是否大于th3;若是,则未发生遮挡;若否,则可能发生遮挡;记是否发生遮挡的指标为ε3,ε3表示为:构建联合指标∈为:∈=ε1 ε2 ε3当∈=0或1时,表示目标未被遮挡或轻微遮挡,使用kcf算法的结果作为跟踪结果;当∈=2或3时,表示目标被严重遮挡,使用kalman滤波算法的结果作为跟踪结果。4.根据权利要求3所述的一种面向严重遮挡场景的核相关滤波跟踪方法,其特征在于,所述步骤3,包括:若使用kcf算法的结果作为跟踪结果,则进行kcf滤波器更新,同时还将kcf算法的结果作为kalman测量值对kalman滤波器进行更新;若使用kalman滤波算法的结果作为跟踪结果,则对kalman滤波器进行更新,kcf滤波器停止更新。5.根据权利要求4所述的一种面向严重遮挡场景的核相关滤波跟踪方法,其特征在于,所述kcf滤波器的更新,包括:α
t
=θ((1-ρ)α
t-1
ρα
t
) (1-θ)α
t-1
x
t
=θ((1-ρ)x
t-1
ρx
t
) (1-θ)x
t-1
其中,ρ表示kcf滤波器参数的更新系数;α
t-1
和α
t
表示第t-1帧和第t帧的kcf滤波器系数,x
t-1
和x
t
表示第t-1帧和第t帧的kcf滤波器选用的目标模型的参数。6.一种面向严重遮挡场景的核相关滤波跟踪系统,其特征在于,包括:初始化模块,用于初始化kcf滤波器的kcf算法和kalman滤波器的kalman滤波算法,以第一帧的目标位置作为kcf算法和kalman滤波算法的初始位置;判断模块,用于使用遮挡检测机制判断当前图像中是否发生目标严重遮挡;若否,则采用kcf算法的跟踪结果作为目标物体在当前图像中的位置;若是,则采用kalman滤波算法的跟踪结果作为目标物体在当前图像中的位置;更新模块,用于根据各自的跟踪结果分别对kalman滤波器和kcf滤波器进行自适应更新;执行模块,用于读取下一个视频帧,返回执行步骤2;直至跟踪过程结束。7.根据权利要求6所述的一种面向严重遮挡场景的核相关滤波跟踪系统,其特征在于,所述判断模块采用联合指标遮挡检测机制处理图像,以判断当前图像中目标是否发生严重遮挡。8.根据权利要求7所述的一种面向严重遮挡场景的核相关滤波跟踪方法,其特征在于,所述联合指标遮挡检测机制为:(1)基于融合特征的相似性判断特征融合指标f使用hsv和lbp特征进行构建,包括:基于kcf算法的检测区域,分别提取目标和背景区域的hsv和lbp特征,并对提取的(hsv
target
,hsv
background
)和(lbp
target
,lbp
background
)使用下述公式进行归一化处理,记待处理的特征向量为x=(x1,x2,...,x
n-1
,x
n
)
t
,归一化后的特征向量为x
*
::在得到归一化的特征向量后,分别计算hsv
target
与hsv
background
的欧氏距离d
hsv
,lbp
target
与lbp
background
的欧氏距离d
lbp
:
其中,表示目标的hsv特征向量的第i个分量值,表示目标的lbp特征向量的第i个分量值,表示背景区域的hsv特征向量的第i个分量值,表示背景区域的lbp特征向量的第i个分量值;指标d用于反应在此特征下,目标和背景之间的区分程度;hsv和lbp在融合特征中的权值计算方式如下:γ
hsv
=1-γ
lbp
通过提取相邻两帧目标特征的hsv和lbp特征,计算得到相第k帧目标的特征相似性和和和其中,hsv
k
和hsv
k-1
表示第k帧和第k-1帧中目标的hsv特征,lbp
k
和lbp
k-1
表示第k帧和第k-1帧中目标的lbp特征;通过权重γ
lbp
和γ
hsv
进行加权求和,得到特征融合f:利用融合特征f进行相似性判断:当执行到第n帧时,首先利用得到的历史相似性距离数据计算平均相似性距离s,并计算相应的阈值th1,计算公式如下:th1=δ1*s(1<δ1<2)其中,δ1表示平均相似性距离s的阈值系数;然后计算第n-1与n帧的目标融合特征的欧式距离f
n
,并判断欧式距离f
n
是否大于th1;若否,则并未发生遮挡;若是,则可能发生遮挡;记是否发生遮挡的指标为ε1,ε1表示为:(2)基于最大响应值的跟踪效果判断
使用最大响应值f
max
进行跟踪效果判断,包括:当执行到第n帧时,首先,统计前n-1帧的历史最大响应值信息,计算平均最大响应响应值m和阈值th2,m和th2计算公式如下:th2=δ2*m(0<δ2<1)其中,表示第i帧的最大响应值,δ2表示平均最大响应响应值m的阈值系数;然后,判断第n帧的最大响应值是否大于th2;若是,则当前并未发生遮挡;若否,则可能发生了遮挡;记是否发生遮挡的指标为ε2,ε2表示为:(3)基于平均相关峰值比的评估机制使用平均相关峰值比apce进行跟踪可信度评估,包括:在响应矩阵基础上,利用平均相关峰值比评估核相关滤波跟踪方法的跟踪效果;apce计算公式如下:其中,f
max
表示当前帧的最大响应值,f
min
表示当前帧的最小响应值;计算前n-1帧的平均和阈值th3,用于评估当前帧,即第n帧的跟踪效果,计算公式如下:如下:其中,δ3表示平均相关峰值比的阈值系数;判断是否大于th3;若是,则未发生遮挡;若否,则可能发生遮挡;记是否发生遮挡的指标为ε3,ε3表示为:构建联合指标∈为:∈=ε1 ε2 ε3当∈=0或1时,表示目标未被遮挡或轻微遮挡,使用kcf算法的结果作为跟踪结果;当∈=2或3时,表示目标被严重遮挡,使用kalman滤波算法的结果作为跟踪结果。9.根据权利要求8所述的一种面向严重遮挡场景的核相关滤波跟踪系统,其特征在于,所述更新模块的更新过程,包括:
若使用kcf算法的结果作为跟踪结果,则进行kcf滤波器更新,同时还将kcf算法的结果作为kalman测量值对kalman滤波器进行更新;若使用kalman滤波算法的结果作为跟踪结果,则对kalman滤波器进行更新,kcf滤波器停止更新。10.根据权利要求9所述的一种面向严重遮挡场景的核相关滤波跟踪系统,其特征在于,所述kcf滤波器的更新,包括:α
t
=θ((1-ρ)α
t-1
ρα
t
) (1-θ)α
t-1
x
t
=θ((1-ρ)x
t-1
ρx
t
) (1-θ)x
t-1
其中,ρ表示kcf滤波器参数的更新系数;α
t-1
和α
t
表示第t-1帧和第t帧的kcf滤波器系数,x
t-1
和x
t
表示第t-1帧和第t帧的kcf滤波器选用的目标模型的参数。
技术总结
本发明涉及一种面向严重遮挡场景的核相关滤波目标跟踪方法及系统;其方法包括:步骤1、初始化KCF滤波器的KCF算法和Kalman滤波器的Kalman滤波算法,以第一帧的目标位置作为KCF算法和Kalman滤波算法的初始位置;步骤2、使用遮挡检测机制判断当前图像中是否发生目标严重遮挡;若否,则采用KCF算法的跟踪结果作为目标在当前图像中的位置;若是,则采用Kalman滤波算法的跟踪结果作为目标在当前图像中的位置;步骤3、根据各自的跟踪结果分别对Kalman滤波器和KCF滤波器进行自适应更新;步骤4、读取下一个视频帧,返回执行步骤2;直至跟踪过程结束。本发明在目标被严重遮挡时仍能实现对目标的跟踪。现对目标的跟踪。现对目标的跟踪。
技术研发人员:贾刚勇 文子强 饶欢乐 陈宇星 徐宏
受保护的技术使用者:杭州电子科技大学
技术研发日:2022.07.27
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。