1.本发明涉及手术导航技术领域,尤其涉及一种人体轮廓安全点计算方法。
背景技术:
2.手术导航系统主要原理是将术前的影像空间坐标系、导航坐标系和机械坐标系进行配准后,医生在术前影像中规划穿刺通道,然后将该穿刺通道的位姿根据配准关系转换到机械臂坐标系下,在导航设备的引导下驱动机械臂达到预定位置执行穿刺手术,从而提高穿刺的精准度。通常,医生会自规划通道的起点往规划通道从终点向起点延伸的方向延伸一定距离作为机械臂执行到位的参考点,此参考点是否在人体皮肤表面关系到安装到机械臂的穿刺针是否会在执行穿刺前触碰到人体和执行穿刺的准确度。而要求医生将规划的通道的起始点设定在人体的皮肤表面,显然是有难度的,也增加了医生的工作量。
技术实现要素:
3.发明目的:本发明针对上述不足,提出一种人体轮廓安全点计算方法,根据医生规划的初始通道,自动计算出初始通道与人体皮肤的交点,从而将规划通道的起始点更新至该交点,这样既可以减少医生的工作量也增加了手术的安全性。
4.技术方案:
5.人体轮廓安全点计算方法,包括:
6.获取三维影像各切片中的疑似人体轮廓;
7.在三维影像上规划手术通道得到规划通道;
8.判断规划通道与各切片是否相交,并据此确定候选人体轮廓;
9.选取候选人体轮廓中与规划通道之间距离小于第一阈值的轮廓点形成候选点集;
10.设定第二阈值对候选点集进行聚类得到聚类点集,并计算得到其中质心与规划通道起点最近的聚类点集作为安全点集;
11.选取安全点集中与规划通道距离最小的点,并计算得到其到规划通道的垂直交点作为人体轮廓安全点。
12.确定候选人体轮廓具体为:
13.若规划通道与各切片所在平面有交点,则选取规划通道与各切片的交点中与规划通道起点距离最近的点,在各交点中搜索与该点距离小于搜索阈值的交点得到各候选交点,搜索阈值根据规划通道起点与终点之间的欧式距离设置,以各候选交点所在切片中的人体轮廓作为候选人体轮廓;
14.若规划通道与各切片所在平面无交点,则选取与规划通道距离最近的切片中的人体轮廓作为候选人体轮廓。
15.所述规划通道起点与终点之间的欧式距离为l,所述搜索阈值s设为l/3。
16.形成候选点集的步骤具体为:
17.若规划通道与各切片所在平面有交点,遍历各候选交点所在平面对应的切片中的
人体轮廓的轮廓点,计算该些轮廓点与规划通道所在直线的距离,将距离小于固定阈值的轮廓点存入集合得到候选点集;
18.若规划通道与各切片所在平面无交点,计算候选人体轮廓中的人体轮廓点与规划通道距离,将距离小于固定阈值的点存入集合得到候选点集。
19.所述固定阈值设为36mm。
20.判断规划通道与各切片是否相交具体为:
21.根据规划通道得到其起点a和终点b在影像坐标系中的坐标分别为(xa,ya,za)和(xb,yb,zb),则规划通道向量某一切片所在平面的法向量为u=(xu,yu,zu),则判断k=u
·
v的绝对值是否小于设定阈值,若小于,则认为规划通道与平面平行,二者无交点;否则,认为二者有交点。
22.所述设定阈值为0.001。
23.规划通道与各切片所在平面的交点p
t
(x
t
,y
t
,z
t
)计算如下:
24.平面上某一点坐标为pi(xi,yi,zi),则
25.m=((x
i-xa)*xu (y
i-ya)*yu (z
i-za)*zu)/k
26.x
t
=xa xv*m
27.y
t
=ya yv*m
28.z
t
=za zv*m
29.从而计算得到规划通道与每一切片所在平面的交点。
30.设定第二阈值对候选点集进行聚类具体为:
31.1)寻找种子点;
32.选择候选点集中的一个点作为第一个种子点,并放入点集合中;
33.遍历得到候选点集中与点集合c1中的种子点的距离大于第二阈值的,点作为另一个种子点并放入另一个点集合c2中;
34.遍历候选点集中与所有点集合中的种子点距离均大于第二阈值的点并存入点集合cn中,最终得到所有满足要求的点集合c1、c2、
…
、cn;
35.2)根据种子点进行聚类;
36.遍历候选点集,计算当前点与各点集合ci的种子点之间的距离,将该点存入距离最近的种子点对应的点集合ci中,得到每个种子点的聚类点集合di;
37.计算聚类点集的质心为:
[0038][0039]
其中,p表示某一聚类点集的质心,j表示某一聚类点集中点的索引,pj表示某一聚类点集中第j个点的坐标,n表示某一聚类点集中点的个数。
[0040]
在设定第二阈值对候选点集进行聚类后还包括筛选步骤:
[0041]
计算每个得到的聚类点集中所包含的点的个数,保留个数最多的前n个聚类点集,删除其他聚类点集;其中,n≥2。
[0042]
所述第二阈值为100mm。
[0043]
所述获取疑似人体轮廓具体为:
[0044]
找到三维影像的所有切片中人体的外轮廓,并将其中外轮廓的点数小于设定值的
轮廓删除,得到疑似人体轮廓,所述设定值为200。
[0045]
有益效果:本发明可以根据医生规划的通道,自动计算出规划通道与人体轮廓的安全交点,从而将规划通道的起始点更新至该交点,以该交点作为机械臂执行到位的参考点,既能够减少医生的工作量、提高手术的安全性、提高手术的精准度。
附图说明
[0046]
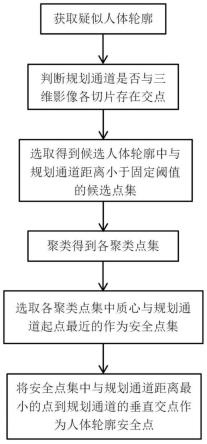
图1为本发明的人体轮廓安全点计算流程图;
[0047]
图2为人体示意图。
具体实施方式
[0048]
下面结合附图和具体实施例,进一步阐明本发明。
[0049]
如图1所示,本发明的人体轮廓安全点计算方法包括如下步骤:
[0050]
(1)获取疑似人体轮廓;
[0051]
术前扫描人体三维影像,并利用opencv的库函数找到所有切片中人体的外轮廓,并将其中外轮廓的点数小于设定值的轮廓删除,以减少杂区轮廓的干扰,得到疑似人体轮廓,如图2所示;其中,设定值为200。
[0052]
在本发明中,人体三维影像切片选择的水平面(即横断面)的切片,如图2所示,但本发明并不止于此,本发明也可以选择冠状面或矢状面,但是一般规划的手术通道是与人体冠状面相交甚至垂直,因此选择水平面或矢状面的效果更好。
[0053]
(2)判断规划通道是否与三维影像各切片存在交点;
[0054]
在人体三维影像中进行穿刺通道规划得到规划通道,规划通道的起点a和终点b在影像坐标系中的坐标分别为(xa,ya,za)和(xb,yb,zb),利用直线到平面交点计算方法计算得到规划通道所在直线与各切片所在平面的交点,具体如下:
[0055]
已知某一切片所在平面的法向量为u=(xu,yu,zu),该平面上某一点坐标为pi(xi,yi,zi),规划通道向量则判断k=u
·
v的绝对值是否小于设定阈值,若小于,则认为规划通道与平面平行,二者无交点;否则,认为二者有交点,其中,设定阈值为0.001;
[0056]
(3)确定候选人体轮廓,并选取候选人体轮廓中与规划通道距离小于固定阈值的轮廓点形成候选点集b;
[0057]
若规划通道与各切片所在平面有交点,则为了减小计算量,选择与规划通道起点a相距一定距离范围内的交点所在平面对应的切片中的人体轮廓作为候选人体轮廓,具体如下:
[0058]
首先,计算规划通道所在直线与各切片所在平面的交点,交点p
t
(x
t
,y
t
,z
t
)计算公式如下:
[0059]
m=((x
i-xa)*xu (y
i-ya)*yu (z
i-za)*zu)/k
[0060]
x
t
=xa xv*m
[0061]yt
=ya yv*m
[0062]zt
=za zv*m
[0063]
从而可以计算得到规划通道与每一切片所在平面的交点,得到交点集合a;
[0064]
计算交点集合a中与规划通道起点a距离最近的点c,在集合a中搜索与点c的距离小于搜索阈值s的交点,得到候选交点集合,并将候选交点集合中各候选交点所在切片中的人体轮廓作为候选人体轮廓;其中,规划通道起点a与终点b之间的欧式距离为l,则根据l设置搜索阈值s,搜索阈值s设为l/3;
[0065]
遍历得到的候选交点集合中各候选交点所在平面对应的切片中的人体轮廓的轮廓点,计算该些轮廓点与规划通道所在直线的距离,将距离小于固定阈值的轮廓点存入集合得到候选点集b;
[0066]
若规划通道与各切片所在平面无交点,则选取与规划通道距离最近平面所对应的切片中的人体轮廓作为候选人体轮廓,并计算该候选人体轮廓中的人体轮廓点与规划通道距离,将距离小于固定阈值的点存入集合得到候选点集b,固定阈值设为36mm;
[0067]
(4)聚类;
[0068]
(41)寻找种子点;
[0069]
选择候选点集b中的一个点作为第一个种子点,并放入点集合c1中,然后计算候选点集b中的点与点集合c1中的种子点的距离,当该点与点集合c1中的种子点的距离大于设定的距离阈值,则将该点作为另一个种子点并放入另一个点集合c2中;继续遍历得到候选点集b中与所有点集合中的种子点均大于设定阈值的点并存入点集合cn中,得到所有满足要求的点集合c1、c2、
…
、cn,设定的距离阈值为100mm;
[0070]
(42)根据种子点进行聚类;
[0071]
遍历候选点集b,计算当前点与各点集合ci的种子点之间的距离,将该点存入距离最近的种子点对应的点集合ci中,从而将每个种子点的附近点彼此分离,得到每个种子点的聚类点集di;
[0072]
(5)得到质心与规划通道起点距离最近的聚类点集d;
[0073]
计算每个聚类点集di中所包含的点的个数,保留个数最多的前两个聚类点集,删除其他聚类点集;在本发明中,保留的聚类点集数量还可以设置为m,m大于2;
[0074]
计算该两个聚类点集的质心,具体计算公式如下:
[0075][0076]
其中,p表示某一聚类点集的质心,j表示某一聚类点集中点的索引,pj表示某一聚类点集中第j个点的坐标,n表示某一聚类点集中点的个数;
[0077]
分别计算该两个聚类点集的质心与规划通道起点a之间的距离,并选取距离更小的聚类点集作为安全点集e;
[0078]
(6)选取安全点集e中与规划通道距离最小的点,其到规划通道的垂直交点即为人体轮廓安全点。
[0079]
遍历安全点集e,计算得到该安全点集中各点到规划通道的距离,得到与规划通道最小的点pe,据此计算得到点pe到规划通道的垂直交点,该交点即为规划通道与人体轮廓的安全点。
[0080]
本发明根据医生规划的通道与三维影像各切片的交点及三维影像的人体轮廓点计算得到规划通道与人体轮廓的安全交点,从而将规划通道的起始点更新至该交点,以该交点作为机械臂执行到位的参考点,既能够减少医生的工作量、提高手术的安全性、提高手
术的精准度。
[0081]
以上详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换(如数量、形状、位置等),这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。