1.能病理活检的胶囊内窥镜机器人属于临床、医学研究中使用的一种用于肠胃的微型胶囊内窥镜增加的病理活检功能,是病理检查智能仪器。是目前电子和纤维镜的病理组织的活检系统替代和换代产品。
背景技术:
2.在传统内的内窥镜系统中,图像采集器的供电,以及图像采集器与系统之间的通信是通过电缆来实现的。电缆的使用不仅使内窥镜的检查范围受到限制,也给患者带来痛苦。随着微电子技术的发展,目前已有了无线内窥镜系统。2001年5月以色列given imaging公司最先推出m2a无线胶囊式内窥镜系统并用于临床,当年8月获美国fda认证。日本、美国、韩国等也纷纷开展了这方面的研究。自此,人们能以无痛、无创、无拘束、基本无不适感的方式获得整个小肠段的清晰图像,并显著提高了小肠病变的诊断率。当前的纤维和电子胃肠镜不仅能对胃大肠(不包括小肠)影像学检查,并且能够实现对病变区病理进行取标本进行病理活检,但是推进时的检查存在痛苦大,不能进入小肠等缺陷。然而目前的胶囊内窥镜检查仪实现对整个消化道(包括小肠)的影像学检查,却存在不能实现对病变区病理取标本进行病理活检,利用所拍图像图片不能判别病理属性等缺点。胶囊内窥镜的问世给消化道疾病的患者带来便利,但是,现阶段的胶囊内窥镜智能靠图像采集给临床医师,对疾病的病理性质没有推进式胃肠镜的活体组织采集功能,发明创新智能的功能可以弥补并实现胶囊内窥镜采集活体组织功能。有学者总结胶囊内窥镜的缺陷和不足之一:胶囊内窥镜目前仅可视物,无法活检和内镜下治疗,而临床上许多疾病的诊断最终依靠病理结果。目前亟需解决的一个主要方面问题是:活检,而临床上一类疾病的诊断最终需要病理结果。
技术实现要素:
3.本发明能病理活检的胶囊内窥镜机器人由活检刀片、磁铁、磁控负压泵 、摄像头装置、电路板、电池组、 线圈、微处理器模块等组成,其中活检刀片中心区域是透光材料制成,可以代替摄像头的透镜功能。在工作状态为闭合状态作为透镜状态,通过监视发明可疑病变组织后,控制能病理活检的胶囊内窥镜机器人贴近病理组织,启动负压泵固定在病理组织上,遥控器控制切取病理组织,带出体外可以进行病理组织活体检查,判别病理属性,定性诊断。
4.技术条件:电能供应6~8v直流0.5~0.8a电池类型外置,镍金属6v7000mah电池包重量912克阵列传感器8片40mm直径柔性pcb应用软件:数据输出jpej,avi,html
数据显示图像、时间及其它诊断数据有益性:本发明有益性是能病理活检的胶囊内窥镜机器人进行检查时,除具备目前胶囊内窥镜取得病理影像外,可以进行病理组织活体检查,判别病理属性,定性诊断。
附图说明
5.下面结合附图和实施例对本发明进一步说明。
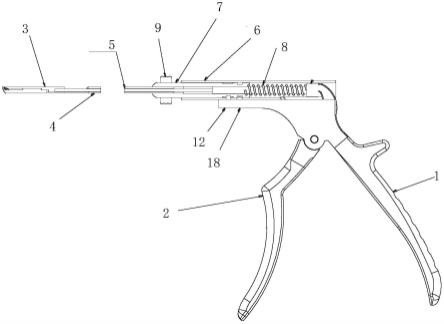
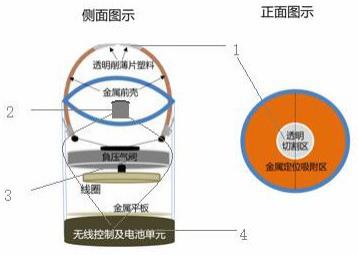
6.图1 能病理活检的胶囊内窥镜机器人示意图图2 电磁活检刀和负压泵原理图图3模拟开合活检原理图图4微处理器模块原理示意图在图1: 1、活检刀片 2、磁铁 3、磁控负压泵 4、无线控制及电池单元在图2:电磁式活检舱舱体门一般由铁芯、线圈、衔铁、触点簧片(舱体门牙刀)等组成的。只要在线圈两端加上一定的电压,线圈中就会流过一定的电流,从而产生电磁效应,衔铁就会在电磁力吸引的作用下克服返回弹簧的拉力吸向铁芯,从而带动衔铁的动触点与静触点(常开触点)吸合。
7.在图3:当线圈断电后,电磁的吸力也随之消失,衔铁就会在弹簧的反作用力返回原来的位置,使动触点与原来的静触点(常闭触点)释放。这样吸合、释放,从而达到了在电路中的导通、切断的目的。
8.在图4:磁极变换:l1(ya)器件为提供磁力的线圈,q1,q2,q3,q4构成全桥控制电路,当控制q1,q4导通q2,q3截止时,线圈电流方向为q1-》l1-》q4,此时线圈磁场方向为ns,当q2,q3导通q1,q4截止时,线圈电流方向为q2-》l1-》q3,此时线圈磁场方向为sn。四个控制开关由全桥电路进行驱动,mpu微处理器单元进行控制导通链路,从而实现由mpu进行磁极方向变换的控制。
9.具体实施方式:能病理活检的胶囊内窥镜机器人在通过食道进入胃肠。通过显示器监视查看胃肠内的情况,如果发现息肉肿块等病变,通过体外磁性磁力控制活检舱舱体,驻停并贴近病理组织处,遥控打开磁性活检舱舱体门,控制吸盘固定于病变组织上,根据具体情况选择活体组织钳咬去病理组织,随后关闭磁性活检舱舱体门牙。待完成肠道腔体检查后排除体外,收集病理组织进行病理检查。
技术特征:
1.能病理活检的胶囊内窥镜机器人由活检刀片、磁铁、磁控负压泵、摄像头装置、电路板、电池组、线圈、微处理器模块等组成,其特征是其中活检刀片中心区域是透光材料制成,可以代替摄像头的透镜功能。2.在工作状态为闭合状态作为透镜状态,通过监视发明可疑病变组织后,控制能病理活检的胶囊内窥镜机器人贴近病理组织,启动负压泵固定在病理组织上,遥控器控制切取病理组织,带出体外可以进行病理组织活体检查,判别病理属性,定性诊断。3.根据权利1所述能病理活检的胶囊内窥镜机器人,其特征是:铁芯、线圈、衔铁、触点簧片运动通过电链接和无线电控制。4.根据权利要求1所述能病理活检的胶囊内窥镜机器人,其特征是:活检刀片中心区域是透光材料制成,可以代替摄像头的透镜功能。5.根据权利要求1所述能病理活检的胶囊内窥镜机器人,其特征是:病理活检的胶囊内窥镜机器人贴近病理组织,启动负压泵固定在病理组织上。6.根据权利要求1所述能病理活检的胶囊内窥镜机器人,其特征是:遥控器控制切取病理组织,带出体外可以进行病理组织活体检查,判别病理属性,定性诊断。
技术总结
本发明能病理活检的胶囊内窥镜机器人由活检刀片、磁铁、磁控负压泵、摄像头装置、电路板、电池组、线圈、微处理器模块等组成,其中活检刀片中心区域是透光材料制成,可以代替摄像头的透镜功能。在工作状态为闭合状态作为透镜状态,通过监视发明可疑病变组织后,控制能病理活检的胶囊内窥镜机器人贴近病理组织,启动负压泵固定在病理组织上,遥控器控制切取病理组织,带出体外可以进行病理组织活体检查,判别病理属性,定性诊断。定性诊断。定性诊断。
技术研发人员:陈少明 陈彦琪
受保护的技术使用者:上海众仁生物医药科技有限公司
技术研发日:2022.03.02
技术公布日:2022/10/24
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。