1.本实用新型涉及一种在车辆的前挡风玻璃、合成器(combiner)等上显示虚像的平视显示装置以及移动体。
背景技术:
2.由与透过车辆的前挡风玻璃、合成器等反射透光部件的实景(车辆前方的风景)重叠,并被该反射透光部件反射的图像光生成虚像并进行显示的平视显示装置,在极力抑制驾驶车辆的观察者的视线移动的同时,通过虚像提供观察者所期望的信息,由此有助于安全且舒适的车辆运行。
3.由于前挡风玻璃(被投影部件)是曲面,因此在投影于该曲面的图像上产生变形(畸变、失真)。另外,平视显示装置具备具有光焦度(optical power)的中继光学系统,通过这些中继光学系统和被投影部件,使观察者得以视觉识别将图像放大的虚像。即,也可以说由中继光学系统和被投影部件形成虚像光学系统。如果观察者的眼睛位置不同,则到达该眼睛位置的图像光的光路不同,即,通过虚像光学系统而附加到图像光的光焦度也有所不同。因此,根据观察者的眼睛位置的变化,也产生图像的变形。
4.在专利文献1中记载了以下的平视显示装置:通过事先生成附加有与在虚像光学系统中产生的变形相反的变形的图像(执行事先变形处理),从而在作为虚像被视觉识别时,感知到变形少的图像。
5.现有技术文献
6.专利文献
7.专利文献1:日本专利特开2015-87619号公报
8.在虚像光学系统中产生的变形不仅能够产生从观察者观察的左右方向的变形和上下方向的变形,还能够产生进深方向的变形。例如,假想即使是在想要在一个平面上显示整个虚像的情况下,当该进深方向的变形大时,观察者感知到的虚像不会被感知为处于平面上,从而带来不适感。
技术实现要素:
9.本实用新型是鉴于上述情况而完成的,其课题在于提供一种能够显示难以识别进深方向的变形的图像的虚像的平视显示装置。具体而言,其课题在于提供一种即使是在视域内眼睛位置不同的情况下,也能够显示难以识别进深方向的变形的图像的虚像的平视显示装置。
10.在本实用新型的平视显示装置的方式中,具备:显示器,上述显示器具有射出图像光的显示面;以及中继光学系统,上述中继光学系统使来自显示器21的图像光经由被投影部朝向车辆内的视域,在从视域内观察的显示区域内视觉识别图像的虚像,显示区域包括:上端部;下端部;以及上端部与下端部之间的中心部,是从视域内的规定的眼睛位置观察的上端部以及下端部配置于比规定的基准平面靠近视域的位置,从规定的眼睛位置观察的中
心部配置于比基准平面远离视域的位置的第一曲面形状,或者是从规定的眼睛位置观察的上端部以及下端部配置于比规定的基准平面远离视域的位置,从规定的眼睛位置观察的中心部配置于比基准平面靠近视域的位置的第二曲面形状,从眼睛位置至上端部的辐辏角与从眼睛位置至通过上端部的基准平面上的第一点的辐辏角的第一辐辏角差、从眼睛位置至中心部的辐辏角与从眼睛位置至通过中心部的基准平面上的第二点的辐辏角的第二辐辏角差、以及从眼睛位置至下端部的辐辏角与从眼睛位置至通过下端部的基准平面上的第三点的辐辏角的第三辐辏角差分别形成为处于4mrad(mm radian:毫弧度)以内。
附图说明
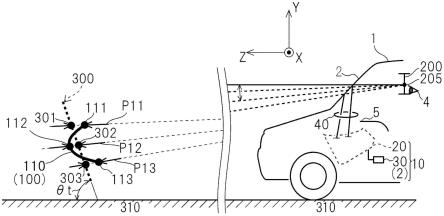
11.图1是表示设置有第一实施方式的移动体用的显示系统的车辆的说明图。
12.图2是表示图1的平视显示装置的结构的说明图。
13.图3是表示图1的显示控制装置的框图。
14.图4a示出了第一实施方式的移动体用的显示系统中的、从处于视域的规定的位置的双眼朝向显示区域的上端部的辐辏角、以及朝向与该上端部重叠的基准平面上的第一点的辐辏角。
15.图4b示出了第一实施方式的移动体用的显示系统中的、从处于视域的规定的位置的双眼朝向显示区域的中间区域的辐辏角、以及朝向与该中间区域重叠的基准平面上的第二点的辐辏角。
16.图4c示出了第一实施方式的移动体用的显示系统中的、从处于视域的规定的位置的双眼朝向显示区域的下端部的辐辏角、以及朝向与该下端部重叠的基准平面上的第三点的辐辏角。
17.图5a是表示第一实施方式的移动体用的显示系统中的、从视域的视域下部观察时的显示区域的配置的图。
18.图5b是表示第一实施方式的移动体用的显示系统中的、从视域的视域上部观察时的显示区域的配置的图。
19.图6是表示第一实施方式的移动体用的显示系统中的、显示区域的配置的图。
20.图7是表示设置有第二实施方式的移动体用的显示系统的车辆的说明图。
21.图8是表示图7的平视显示装置的结构的说明图。
22.图9a示出了第二实施方式的移动体用的显示系统中的、从处于视域的规定的位置的双眼朝向显示区域的上端部的辐辏角、以及朝向与该上端部重叠的基准平面上的第一点的辐辏角。
23.图9b示出了第二实施方式的移动体用的显示系统中的、从处于视域的规定的位置的双眼朝向显示区域的中间区域的辐辏角、以及朝向与该中间区域重叠的基准平面上的第二点的辐辏角。
24.图9c示出了第二实施方式的移动体用的显示系统中的、从处于视域的规定的位置的双眼朝向显示区域的下端部的辐辏角、以及朝向与该下端部重叠的基准平面上的第三点的辐辏角。
25.图10a是表示第二实施方式的移动体用的显示系统中的、从视域的视域下部观察时的显示区域的配置的图。
26.图10b是表示第二实施方式的移动体用的显示系统中的、从视域的视域上部观察时的显示区域的配置的图。
27.图11是表示第二实施方式的移动体用的显示系统中的、显示区域的配置的图。
28.图12a是表示第一实施方式的中继光学系统与显示面的配置的图。
29.图12b是表示由图12a的平视显示装置形成的显示区域的形状/配置的图。
30.符号说明
[0031]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车辆
[0032]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
被投影部件
[0033]4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
眼睛位置
[0034]
4l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
左眼
[0035]
4r
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
右眼
[0036]
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示系统
[0037]
20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
平视显示装置(hud装置)
[0038]
21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示器
[0039]
22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
投影机(projector)
[0040]
23
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示面
[0041]
23a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
垂直面
[0042]
25
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
中继光学系统
[0043]
26
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一镜
[0044]
27
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二镜
[0045]
40p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光轴
[0046]
41
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一图像光
[0047]
42
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二图像光
[0048]
50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
hud装置
[0049]
55
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
中继光学系统
[0050]
90
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
虚像光学系统
[0051]
100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示区域
[0052]
100s
ꢀꢀꢀꢀꢀꢀꢀꢀ
显示区域
[0053]
110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一显示区域(第一曲面形状)
[0054]
111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
上端部
[0055]
112
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
中心部
[0056]
113
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
下端部
[0057]
116
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
左端部
[0058]
117
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
右端部
[0059]
120
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二显示区域(第二曲面形状)
[0060]
121
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
上端部
[0061]
122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
中心部
[0062]
123
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
下端部
[0063]
126
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
左端部
[0064]
127
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
右端部
[0065]
200
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视域
[0066]
200s
ꢀꢀꢀꢀꢀꢀꢀꢀ
视域基准位置(规定的眼睛位置)
[0067]
201
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视域上端
[0068]
203
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视域下端
[0069]
205
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视域中心
[0070]
310
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
路面
[0071]mꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
图像
[0072]
p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
辐辏角差
[0073]
p11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一辐辏角差
[0074]
p12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二辐辏角差
[0075]
p13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三辐辏角差
具体实施方式
[0076]
以下,在图1至图6、图12a以及图12b中,提供第一实施方式的移动体用的显示系统以及平视显示装置的结构的说明。另外,图7至图11中,提供第二实施方式的移动体用的显示系统以及平视显示装置的结构的说明。
[0077]
此外,本发明并不限定于以下的实施方式(也包括附图的内容)。当然能够对下述的实施方式加以变更(也包括结构要素的删除)。另外,在以下的说明中,为了容易理解本发明,适当省略公知的技术事项的说明。
[0078]
参见图1。移动体用的显示系统10由hud(head-up display:平视显示)装置20、控制hud装置20的显示控制装置30以及被投影部件2构成。在图1中,示出了本实施方式所涉及的移动体用显示系统用于汽车的情况,但并不限于汽车,也可以用于移动体中的显示装置。此外,在本实施方式的说明中,将坐在车辆1的驾驶席上的观察者(典型的是车辆1的驾驶员)朝向车辆1的前方时的左右方向设为x轴(左方向为x轴正方向),将上下方向设为y轴(上方向为y轴正方向),将前后方向设为z轴(前方向为z轴正方向)。
[0079]
hud装置20将图像光40朝向前挡风玻璃(被投影部件2的一个例子)出射,被投影部件2将hud装置20显示的图像m的图像光40向视域200反射。观察者通过将眼睛位置4配置在视域200内,能够在与经由被投影部件2视觉识别的现实空间即前景重叠的位置视觉识别hud装置20显示的图像m的虚像。
[0080]
在本实施方式的说明中使用的“视域”是指,(1)在区域内能够视觉识别显示区域100内的图像m的虚像的全部,在区域外不会视觉识别图像m的虚像的至少一部分的区域、(2)在区域内能够以规定的亮度以上视觉识别图像m的虚像的全部,在区域外图像m的虚像的一部分小于上述规定的亮度的区域、或者(3)在hud装置20能够显示可立体观察的虚像的情况下,在区域内能够立体观察虚像的至少一部分,在区域外虚像的一部分也不会被立体观察的区域。即,若将观察者的眼睛位置4配置于视域200外,则观察者不能够视觉识别图像m的虚像的一部分,图像m的虚像的一部分的视觉识别性非常低而难以察觉、或者不能够立体观察图像m的虚像。上述规定的亮度例如是在视域的中心被视觉识别的图像m的虚像的亮度的1/50左右。
[0081]
图2是表示本实施方式的hud装置20的结构的图。hud装置20包括:具有显示图像的显示面的显示器21;以及中继光学系统25。
[0082]
图2的显示器21是由投影机22(图像生成部的一个例子)以及接收来自投影机22的投影光而显示图像(实像)的屏幕(显示面23的一个例子)构成的投影型显示器。此外,显示器21可以是透过来自lcd等背光灯的光的透过型显示器(图像生成部的一个例子),也可以是自发光型显示器(图像生成部的一个例子)。在这些情况下,显示面是透过型显示器中的显示器表面(显示面23的一个例子),是投影型显示器的屏幕(显示面23的一个例子)。上述显示面从上述显示面经由后述的中继光学系统25以及被投影部件2相对于朝向上述视域(上述视域的中央)的图像光40的光轴40p垂直的角度倾斜地配置,由此,也能够使显示区域100以沿着路面310的方式配置。
[0083]
另外,也可以是,显示器21安装有包括由显示控制装置30控制的电机等的未图示的致动器,能够使显示面23移动和/或旋转。
[0084]
中继光学系统25由配置于显示器21与被投影部件2之间的来自显示器21的图像的光(从显示器21朝向上述视域的光)的光路上,将来自显示器21的图像的光投影到hud装置20的外侧的被投影部件2的一个或一个以上的光学部件构成。图2的中继光学系统25包括一个凹状的第一镜26以及一个平面的第二镜27。此外,在本实施方式中,中继光学系统25包括两个镜,但不限于此,也可以追加或代替这些而包括一个或一个以上的透镜等折射光学部件、全息图等衍射光学部件、反射光学部件、或这些的组合。
[0085]
中继光学系统25具有使视域200在上下方向(y轴方向)上移动的两个旋转轴(第一旋转轴ax1、第二旋转轴ax2)。第一旋转轴ax1、第二旋转轴ax2分别设定为,在hud装置20被安装于车辆1的状态下,不与车辆1的左右方向(x轴方向)垂直(换言之,不与yz平面平行)。具体而言,第一旋转轴ax1、第二旋转轴ax2与车辆1的左右方向(x轴方向)之间的角度设定为不足45[degree:度],更优选设定为不足20[度]。
[0086]
根据以第一旋转轴ax1的中继光学系统25的旋转,显示区域100的上下方向的移动量比较小,视域200的上下方向的移动量比较大。另外,根据以第二旋转轴ax2的中继光学系统25的旋转,显示区域100的上下方向的移动量比较大,视域200的上下方向的移动量比较小。即,若对第一旋转轴ax1和第二旋转轴ax2进行对比,则由第一旋转轴ax1的旋转引起的“视域200的上下方向的移动量/显示区域100的上下方向的移动量”比由第二旋转轴ax2的旋转引起的“视域200的上下方向的移动量/显示区域100的上下方向的移动量”大。换言之,由以第一旋转轴ax1的中继光学系统25的旋转引起的显示区域100的上下方向的移动量和视域200的上下方向的移动量的相对量与由以第二旋转轴ax2的中继光学系统25的旋转引起的显示区域100的上下方向的移动量和视域200的上下方向的移动量的相对量不同。
[0087]
hud装置20包括:使第一镜26以第一旋转轴ax1旋转的第一致动器28;以及使第一镜26以第二旋转轴ax2旋转的第二致动器29。换言之,hud装置20使一个中继光学系统25以两个轴(第一旋转轴ax1、第二旋转轴ax2)旋转。此外,第一致动器28以及第二致动器29也可以由合并得到的一个双轴致动器构成。
[0088]
另外,其他实施方式中的hud装置20使两个中继光学系统25以两个轴(第一旋转轴ax1、第二旋转轴ax2)旋转。例如,hud装置20也可以包括:使第一镜26以第一旋转轴ax1旋转的第一致动器28;以及使第二镜27以第二旋转轴ax2旋转的第二致动器29。
[0089]
此外,如果通过第一旋转轴ax1的旋转而视域200的上下方向的移动量变得比较大,通过第二旋转轴ax2的旋转而显示区域100的上下方向的移动量变得比较大,则第一旋转轴ax1与第二旋转轴ax2的配置并不限于此。另外,基于致动器的驱动除了旋转之外或者代替旋转,也可以包括移动。
[0090]
另外,其他实施方式中的hud装置20也可以不驱动中继光学系统25。换言之,hud装置20也可以不具有使中继光学系统25旋转和/或旋转的致动器。该实施方式的hud装置20能够具备覆盖设想使用车辆1的驾驶员的眼睛高度的范围的宽的视域200。
[0091]
图3是移动体用的显示系统10的框图。显示控制装置30具备:一个或多个i/o接口31、一个或多个处理器33、一个或多个图像处理电路35以及一个或多个存储器37。图3中记载的各种功能框也可以由硬件、软件或这两者的组合构成。
[0092]
如图所示,处理器33以及图像处理电路35与存储器37可动作地连结。更具体地,处理器33以及图像处理电路35能够通过执行存储在存储器37中的程序来进行例如生成和/或发送图像数据等移动体用的显示系统10的操作。处理器33和/或图像处理电路35能够包括至少一个通用微处理器(例如,中央处理装置(cpu))、至少一个面向特定用途集成电路(asic)、至少一个现场可编程门阵列(fpga)或这些的任意组合。存储器37包括:硬盘那样的任意类型的磁介质、cd以及dvd那样的任意类型的光学介质、易失性存储器(挥发性存储器)那样的任意类型的半导体存储器以及非易失性存储器(非挥发性存储器)。易失性存储器可以包括dram以及sram,非易失性存储器可以包括rom以及nvram。
[0093]
如图所示,处理器33与i/o接口31可动作地连结。i/o接口31根据例如设置于车辆的车辆ecu401和/或其他电子设备(后述的符号403~417)和can(controller area network:控制器区域网)的标准进行通信(也称为can通信)。此外,i/o接口31所采用的通信标准并不限定于can,包括例如canfd(can with flexible data rate:具有灵活的数据速率的can)、lin(local interconnext network:本地互联网)、ethernet(注册商标)、most(media oriented systems transport:面向媒体的系统传输、most是注册商标)、uart、或usb等有线通信接口、或者例如bluetooth(注册商标)网络等个人区域网(pan)、802.11xwi-fi(注册商标)网络等局域网(lan)等数十米内的近距离无线通信接口即车内通信(内部通信)接口。另外,i/o接口31通过无线广域网(wwan0、ieee802.16-2004(wimax:world wide interoperability for microwave access(微波接入全球互通)))、ieee802.16e base(mobile wimax)、4g、4g-lte、lte advanced、5g等蜂窝通信标准,也可以包括广域通信网(例如因特网通信网)等车外通信(外部通信)接口。
[0094]
如图所示,处理器33与i/o接口31可相互动作地连结,由此能够与连接于移动体用的显示系统10(i/o接口31)的各种其他电子设备等交换信息。在i/o接口31上可动作地连结有例如车辆ecu401、道路信息数据库403、本车位置检测部405、车外传感器407、操作检测部409、眼睛位置检测部411、视线方向检测部413、便携信息终端415以及外部通信设备417等。此外,i/o接口31也可以包括对从与移动体用的显示系统10连接的其他电子设备等接收的信息进行加工(变换、运算、解析)的功能。
[0095]
显示器21与处理器33以及图像处理电路35可动作地连结。因此,由图像显示部20显示的图像也可以基于从处理器33和/或图像处理电路35接收到的图像数据。处理器33以及图像处理电路35基于从i/o接口31获取的信息来控制图像显示部20所显示的图像。
[0096]
hud装置20生成的显示区域100是曲面或一部分曲面的区域,也称为成像面。显示区域100是hud装置20的显示器21的显示面23(参照图1)的虚像成像的位置,即,显示区域100与hud装置20的后述的显示面对应(换言之,显示区域100与后述的显示器21的显示面成为共轭关系。),也可以说在显示区域100中被视觉识别的虚像对应于hud装置20的后述的显示面23中显示的图像m。显示区域100自身优选视觉识别性低到实际上观察者无法视觉识别或难以视觉识别的程度。以下,说明hud装置20生成的显示区域100的实施方式。
[0097]
(第一实施方式)
[0098]
第一实施方式所涉及的移动体用的显示系统10(hud装置20)被光学地设计为,如图1所示,从视域200观察时配置的第一显示区域110在与车辆1的前后方向以及上下方向平行的平面(yz平面)上的第一显示区域110的截面形状中,视域200侧成为凹进的形状。即,以连接第一显示区域110的上端部111以及下端部113的线段为基准,上端部111与下端部113之间的中间区域(也包括相当于观察者观察第一显示区域110时的上端部111与下端部113的中心的中心部112)远离视域200而配置。
[0099]
在图1中,在车辆1的左右方向(x轴)以及上下方向(y轴)上不弯曲(不具有曲率)的基准平面300假想地设定在车辆1的前方,第一实施方式所涉及的移动体用的显示系统10(hud装置20)的上端部111以及下端部113配置于比该基准平面300靠近视域200的位置,中心部112配置于比基准平面300远离视域200的位置。
[0100]
参照图4a至图4c。图4a至图4c是表示朝向在hud装置中生成的显示区域的各点的辐辏角和朝向与各点重叠的基准平面上的各点的辐辏角的图。在图4a至图4c中,θhud表示从处于视域200的规定的位置的双眼(右眼4r、左眼4l)朝向在显示区域100的各点(上端部111、中心部112以及下端部113)的辐辏角,θsp表示朝向连接双眼(右眼4r、左眼4l)的中心和显示区域100的各点(上端部111、中心部112以及下端部113)的线相交的基准平面300上的各点(第一点301、第二点302以及第三点303)的辐辏角。
[0101]
图4a表示从处于视域200的规定的位置的双眼(右眼4r、左眼4l)朝向第一显示区域110的上端部111的辐辏角和朝向与该上端部111重叠的基准平面300上的第一点301的辐辏角。在此,第一显示区域110(上端部111)比基准平面300(第一点301)靠近视域200的规定的位置,即,朝向第一显示区域110的上端部111的辐辏角θhud11比朝向基准平面300上的第一点301的辐辏角θsp11大。
[0102]
图4b表示从处于视域200的规定的位置的双眼(右眼4r、左眼4l)朝向第一显示区域110的中心部112的辐辏角和朝向与该上端部111重叠的基准平面300上的第二点302的辐辏角。在此,第一显示区域110(中心部112)比基准平面300(第二点302)远离视域200的规定的位置,即,朝向第一显示区域110的中心部112的辐辏角θhud12比朝向基准平面300上的第二点302的辐辏角θsp12小。
[0103]
图4c表示从处于视域200的规定的位置的双眼(右眼4r、左眼4l)朝向第一显示区域110的下端部113的辐辏角和朝向与该下端部113重叠的基准平面300上的第三点303的辐辏角。在此,第一显示区域110(下端部113)比基准平面300(第三点303)靠近视域200的规定的位置,即,朝向第一显示区域110的下端部113的辐辏角θhud13比朝向基准平面300上的第三点303的辐辏角θsp13大。
[0104]
将θhud与θsp的差称为辐辏角差p(图1的p11、p12、p13)。优选将该辐辏角差设为规
定值(阈值)θth以内。即,通过将由虚像的成像点与相对于该成像点的假想的平面(基准平面)偏离而引起的辐辏角的位移量设为阈值θth以内,能够使观察者难以感知距离偏离(也称为焦点偏离)。在本实施方式中,例如,通过将第一显示区域110的上端部111与基准平面300的辐辏角差p11(辐辏角θhud11与辐辏角θsp11的差)、第一显示区域110的中心部112与基准平面300的辐辏角差p12(辐辏角θhud12与辐辏角θsp12的差)以及第一显示区域110的下端部113与基准平面300的辐辏角差p13(辐辏角θhud13与辐辏角θsp13的差)设为阈值θth以内,第一显示区域110的形状近似于平面(基准平面300),即,在第一显示区域110内显示的虚像容易被观察者感知为显示在平面上。
[0105]
从双眼(将瞳孔间距离假设为平均65[mm])观察的两点间的辐辏角差[mrad]的计算结果示于表1。第一距离设为2至10[m],第二距离设为5至10[m],各个交点部分的数值表示第一距离与第二距离的辐辏角差[mrad]。例如,在第一距离为6[m],第二距离为7[m]的情况下,从双眼(将瞳孔间距离假设为平均65[mm])观察的两点间的辐辏角差为3.7[mrad]。
[0106]
[表1]
[0107][0108]
本技术人认识到,通过将两点间的辐辏角差设为4[mrad](0.23[度])以内,难以感觉到进深方向的两点间的距离差,进一步优选设为2[mrad](0.11[度]),由此更进一步难以感知到两点间的距离差。在表1中,将两点间的辐辏角差为4[mrad]的部位用粗线包围并涂抹。例如,如果第一距离为6[m],则5~9[m](具体而言4.4~9.5[m])的范围成为两点间的辐辏角差为4[mrad]的范围,难以感知到距离差。因此,辐辏角差的阈值θth能够设定为4[mrad],进一步优选设定为2[mrad]。
[0109]
此外,基准平面300被设定为,相对于从视域200内的规定的视域基准位置200s观察时配置的显示区域100,辐辏角差p11、p12、p13相等。在几个实施方式中,视域基准位置200s在视域200的上下方向(y轴方向)上被设定在视域中心205与视域下端203之间的规定的位置。对此将在后面描述。显示区域100的形状以及配置根据观察者的眼睛位置4而发生变化。
[0110]
图5a是表示从视域200的视域下端202观察时配置的第一显示区域110a的图。作为比较例,用虚线表示从视域基准位置200s观察时配置的第一显示区域110s。从视域下端203观察时配置的第一显示区域110a的上端部111a以及中心部112a配置于比基准平面300远离
视域200的位置,下端部113配置于比基准平面300靠近视域200的位置。在对显示区域100s与第一显示区域110a进行比较时,上端部111a的位置变化较大,但由于跨越基准平面300,因此能够抑制相对于上端部111的移动量的与基准平面300的距离差(辐辏角差p11)的变化量(增加量)。
[0111]
图5b是表示从视域200的视域上端201观察时配置的第一显示区域110b的图。作为比较例,用虚线表示从视域基准位置200s观察时配置的第一显示区域110s。从视域上端201观察时配置的第一显示区域110b的下端部113b以及中心部112b配置于比基准平面300远离视域200的位置,上端部111配置于比基准平面300靠近视域200的位置。在对显示区域100s与第一显示区域110b进行比较时,下端部113b的位置变化较大,但由于跨越基准平面300,因此能够抑制相对于下端部113b的移动量的与基准平面300的距离差(辐辏角差p13)的变化量(增加量)。
[0112]
在将车辆1的被投影部件2设为前挡风玻璃的情况下,由眼睛位置的变化引起的显示区域100的形状以及配置的变化在视域200之下的区域(例如,比视域中心205靠下侧的区域)比较大。在视域200之上的区域(例如,比视域中心205靠上侧的区域)比较小。因此,本实施方式的hud装置20在视域200的上下方向(y轴方向)上,将视域中心205与视域下端203之间的规定的位置设定为视域基准位置200s,将从该视域基准位置200s观察时的显示区域100的形状以及配置设定为显示区域100的各点(上端部111、中心部112、下端部113)靠近所希望的基准平面300。具体而言,显示区域100形成为使得来自视域基准位置200s的第一辐辏角差p11、第二辐辏角差p12以及第三辐辏角差p13大致相等。由此,即使在视域200内眼睛位置4不同的情况下,也能够减少与所希望的基准平面300的偏离。此外,在上述实施方式中,将显示区域100的形状、配置以及视域200的范围设定为,在视域下端203,上端部111跨越基准平面300(参照图5a),并且,在视域上端201,下端部113跨越基准平面300(参照图5b),但也可以仅任一方。即,例如,也可以是,在视域下端203,上端部111跨越基准平面300(参照图5a),并且,在视域上端201,下端部113不跨越基准平面300。另外,在本实施方式中,也存在以下情况:在视域下端203,上端部111不跨越基准平面300(参照图5a),并且在视域上端201,下端部113不跨越基准平面300。
[0113]
另外,在几个实施方式的hud装置20中,也可以设定显示区域100的形状、配置以及视域200的范围,以使眼睛位置4处于视域下端203时的第一显示区域110a与基准平面300的辐辏角差p的最大值和眼睛位置4处于视域上端201时的第一显示区域110b与基准平面300的辐辏角差p的最大值大致相等。具体而言,例如,hud装置20也可以设定显示区域100的形状、配置以及视域200的范围,以使眼睛位置4处于视域下端203时的第一显示区域110a的上端部111a与基准平面300的辐辏角差p11和眼睛位置4处于视域上端201时的第一显示区域110b的下端部113b与基准平面300的辐辏角差p13大致相等。由此,即使在视域200内眼睛位置4不同的情况下,也能够减少与所希望的基准平面300的偏离。
[0114]
此外,上述实施方式的第一弯曲形状的第一显示区域110在车辆1的左右方向(x轴)上朝向视域200凹陷,但除此之外,也可以在车辆1的上下方向(y轴)上朝向视域200凹陷。该实施方式中的移动体用的显示系统10(hud装置20)被光学地设计为,如图6所示,从视域200观察时配置的第一显示区域110在与车辆1的前后方向以及左右方向平行的平面(zx平面)上的第一显示区域110的截面形状中,视域200侧成为凹进的形状。即,以连接第一显
示区域110的左端部116与右端部117的线段为基准,左端部116与右端部117之间的中间区域(也包括相当于观察者观察第一显示区域110时的左端部116与右端部117的中心的中心部112)远离视域200而配置。
[0115]
如图6所示,在第一实施方式所涉及的移动体用的显示系统10(hud装置20)中,当双眼的中心位于视域200的左右方向的中心时配置的第一显示区域110的左端部116以及右端部117配置在比基准平面300靠近视域200的位置,中心部112配置在比基准平面300远离视域200的位置。在双眼的中心位于视域200的左右方向的中心的右侧时配置的第一显示区域110的左端部116以及中心部112配置于比基准平面300远离视域200的位置,右端部117配置于比基准平面300靠近视域200的位置。相反,在双眼的中心位于视域200的左右方向的中心的左侧时配置的第一显示区域110的右端部117以及中心部112配置于比基准平面300远离视域200的位置,左端部116配置于比基准平面300靠近视域200的位置。即,设定显示区域100的形状、配置以及视域200的范围,以使在视域右部(未图示),左端部116跨越基准平面300,并且,在视域左部(未图示),右端部117跨越基准平面300,但也可以仅任一方。即,例如,也可以是,在视域右部(未图示),左端部116跨越基准平面300,并且,在视域左部(未图示),右端部117不跨越基准平面300。另外,在本实施方式中,也存在以下情况:在视域右部,左端部116不跨越基准平面300,并且,在视域左部,右端部117也不跨越基准平面300。
[0116]
(第二实施方式)
[0117]
第二实施方式所涉及的移动体用的显示系统10(hud装置50)被光学地设计为,如图7所示,当从视域200观察时配置的第二显示区域120在平行于车辆1的前后方向以及上下方向的平面(yz平面)上的第二显示区域120的截面形状中,视域200侧成为凸出的形状。即,以连接第二显示区域120的上端部121与下端部123的线段为基准,上端部121与下端部123之间的中间区域(也包括相当于观察者观察第二显示区域120时的上端部121与下端部123的中心的中心部122)配置于视域200的附近。
[0118]
如图8所示,hud装置50在通过中继光学系统55使上下方向的图像光40交叉这一点上与第一实施方式的hud装置20不同。因此,第二实施方式的hud装置50所产生的第二显示区域120能够具有与第一实施方式的hud装置20所产生的第一显示区域110相反方向的凸出。
[0119]
在图7中,在车辆1的左右方向(x轴)以及上下方向(y轴)上不弯曲(不具有曲率)的基准平面300被假设设定在车辆1的前方,第二实施方式所涉及的移动体用的显示系统10(hud装置50)中的上端部121以及下端部123配置在比基准平面300远离视域200的位置,中心部122配置在比基准平面300靠近视域200的位置。
[0120]
参照图9a至图9c。图9a至9c是表示朝向由第二实施方式的hud装置产生的显示区域的各点的辐辏角以及朝向与各点重叠的基准平面上的各点的辐辏角的图。
[0121]
图9a表示从处于视域200的规定的位置(视域基准位置200s)的双眼(右眼4r、左眼4l)朝向第二显示区域120的上端部121的辐辏角以及朝向与该上端部121重叠的基准平面300上的第一点301的辐辏角。此处,第二显示区域120(上端部121)比基准平面300(第一点301)远离视域200的规定的位置,即,朝向第二显示区域120的上端部121的辐辏角θhud21比朝向基准平面300上的第一点301的辐辏角θsp21小。
[0122]
图9b表示从处于视域200的规定的位置(视域基准位置200s)的双眼(右眼4r、左眼
4l)朝向第二显示区域120的中心部122的辐辏角以及朝向与该上端部121重叠的基准平面300上的第二点302的辐辏角。此处,第二显示区域120(中心部122)比基准平面300(第二点302)靠近视域200的规定的位置,即,朝向第二显示区域120的中心部122的辐辏角θhud22比朝向基准平面300上的第二点302的辐辏角θsp22大。
[0123]
图9c表示从处于视域200的规定的位置(视域基准位置200s)的双眼(右眼4r、左眼4l)朝向第二显示区域120的下端部123的辐辏角以及朝向与该下端部123重叠的基准平面300上的第三点303的辐辏角。此处,第二显示区域120(下端部123)比基准平面300(第三点303)远离视域200的规定的位置,即,朝向第二显示区域120的下端部123的辐辏角θhud23比朝向基准平面300上的第三点303的辐辏角θsp23小。
[0124]
将θhud与θsp的差称为辐辏角差p(图7的p21、p22、p23)。在本实施方式中,例如,通过将第二显示区域120的上端部121与基准平面300的辐辏角差p21(辐辏角θhud21与辐辏角θsp21的差)、第二显示区域120的中心部122与基准平面300的辐辏角差p22(辐辏角θhud22与辐辏角θsp22的差)以及第二显示区域120的下端部123与基准平面300的辐辏角差p23(辐辏角θhud23与辐辏角θsp23的差)设为阈值θth以内,第二显示区域120的形状近似为平面(基准平面300),即,在第二显示区域120内显示的虚像容易被观察者感知为显示在平面上。
[0125]
此外,基准平面300被设定为,相对于从视域200内的规定的视域基准位置200s观察时配置的显示区域100,辐辏角差p21、p22、p23相等。
[0126]
图10a是表示从视域200的视域下端203观察时配置的第二显示区域120a的图。作为比较例,用虚线表示从视域基准位置200s观察时配置的第二显示区域120s。从视域下端203观察时配置的第二显示区域120a的上端部121a、中心部122a以及下端部123a配置于比基准平面300远离视域200的位置。在对显示区域100s与第二显示区域120a进行比较时,由于中心部122a跨越基准平面300,所以能够抑制相对于中心部122的移动量的与基准平面300的距离差(辐辏角差p22)的变化量(增加量)。
[0127]
图10b是表示从视域200的视域上端201观察时配置的第二显示区域120b的图。作为比较例,用虚线表示从视域基准位置200s观察时配置的第二显示区域120s。从视域上端201观察时配置的第二显示区域120b的下端部123b以及中心部122b配置于比基准平面300靠近视域200的位置,上端部121配置于比基准平面300远离视域200的位置。在对显示区域100s与第二显示区域120b进行比较时,下端部123b的位置变化较大,但由于跨越基准平面300,所以能够抑制相对于下端部123的移动量的与基准平面300的距离差(辐辏角差p23)的变化量(增加量)。
[0128]
第二实施方式的hud装置50也是同样的,在将车辆1的被投影部件2作为前挡风玻璃的情况下,由眼睛位置的变化引起的显示区域100的形状以及配置的变化在视域200之下的区域(例如,比视域中心205靠下侧的区域)比较大。在视域200之上的区域(例如比视域中心205靠上侧的区域)比较小。因此,本实施方式的hud装置50在视域200的上下方向(y轴方向)上,将视域中心205与视域下端203之间的规定的位置设定为视域基准位置200s,将从该视域基准位置200s观察时的显示区域100的形状以及配置设定为显示区域100的各点(上端部121、中心部122、下端部123)靠近所希望的基准平面300。由此,即使在视域200内眼睛位置4不同的情况下,也能够减少与所希望的基准平面300的偏离。此外,在上述实施方式中,设定显示区域100的形状、配置以及视域200的范围,以使在视域下端203,中心部122跨越基
准平面300(参照图10a),并且,在视域上端201,下端部123跨越基准平面300(参照图10b),但也可以仅任一方。即,例如,也可以是,在视域下端203,上端部121跨越基准平面300(参照图10a),并且,在视域上端201,下端部123不跨越基准平面300。另外,在本实施方式中,也存在以下情况:在视域下端203,上端部121不跨越基准平面300(参照图10a),并且,在视域上端201,下端部123也不跨越基准平面300。
[0129]
另外,在几个实施方式的hud装置50中,也可以设定显示区域100的形状、配置以及视域200的范围,以使眼睛位置4处于视域下端203时的第二显示区域120a与基准平面300的辐辏角差p的最大值和眼睛位置4处于视域上端201时的第二显示区域120b与基准平面300的辐辏角差p的最大值大致相等。具体而言,例如,hud装置50也可以设定显示区域100的形状、配置以及视域200的范围,以使眼睛位置4处于视域下端203时的第二显示区域120a的上端部121与基准平面300的辐辏角差p21和眼睛位置4处于视域上端201时的第二显示区域120b的下端部123b与基准平面300的辐辏角差p23大致相等。由此,即使在视域200内眼睛位置4不同的情况下,也能够减少与所希望的基准平面300的偏离。
[0130]
此外,上述实施方式的第一弯曲形状的第二显示区域120在车辆1的左右方向(x轴)上向视域200凸出,但除此之外,也可以在车辆1的上下方向(y轴)上也向视域200凸出。该实施方式中的移动体用的显示系统10(hud装置50)被光学地设计为,如图11所示,从视域200观察时配置的第二显示区域120在与车辆1的前后方向以及左右方向平行的平面(zx平面)上的第二显示区域120的截面形状中,成为向视域200侧突出的形状。即,以连接第二显示区域120的左端部126与右端部127的线段为基准,左端部126与右端部127之间的中间区域(也包括相当于观察者观察第二显示区域120时的左端部126与右端部127的中心的中心部122)配置于比基准平面300靠近视域200的位置。
[0131]
如图11所示,在第二实施方式所涉及的移动体用的显示系统10(hud装置50)中,双眼的中心位于视域200的左右方向的中心时配置的第二显示区域120的左端部126以及右端部127配置在比基准平面300靠近视域200的位置,中心部122配置在比基准平面300远离视域200的位置。双眼的中心位于视域200的左右方向的中心的右侧时配置的第二显示区域120的左端部126以及中心部122配置于比基准平面300远离视域200的位置,右端部127配置于比基准平面300靠近视域200的位置。相反,双眼的中心位于视域200的左右方向的中心的左侧时配置的第二显示区域120的右端部127以及中心部122配置于比基准平面300远离视域200的位置,左端部126配置于比基准平面300靠近视域200的位置。
[0132]
接着,说明通过调整虚像光学系统90(凹面镜26)中的全部区域或一部分区域的光学特性、以及调整光学部件(例如凹面镜26)和显示面23的配置,来设定显示区域100的形状以及配置的例子。
[0133]
图12a是表示第一实施方式的中继光学系统25和显示面23的配置的图。另外,在图12a中,为了容易理解与比较例的不同,用符号251f、252f、253f标记中继光学系统25的各区域251、252、253的焦点,但没有准确表示与中继光学系统25或显示面23的距离关系。本实施方式的显示面23从与从显示面23朝向视域200的图像光40的光轴40p的垂直面23a倾斜角度α而配置。具体而言,显示面23与垂直面23a相比,从观察者观察与第一显示区域110的上端部111(参照图12b)对应的显示面23的区域231远离中继光学系统25,与中心部112(参照图12b)对应的显示面23的区域232靠近中继光学系统25而配置。本实施方式的中继光学系统
25在每个区域中曲率半径不同。具体而言,使从驾驶员观察在第一显示区域110的上端部111显示虚像的第一图像光41所通过的中继光学系统25的第一区域(第一光路)251的第一光焦度比从驾驶员观察在比第一显示区域110的上端部111靠下侧视觉识别的中心部112显示虚像的第二图像光42所通过的中继光学系统25的第二区域(第二光路)252的第二光焦度小。即,中继光学系统25的主要的光焦度起因于凹面镜即第一镜26的情况下,使反射第一图像光41的第一区域251的第一曲率半径(第一光焦度的一个例子)大于反射第二图像图像光42的第二区域252的第二曲率半径(第二光焦度的一个例子)。当反射第一图像光41的第一区域251的第一曲率半径变大时,第一区域251的焦点251f的焦距(曲率半径的1/2)变长。
[0134]
此处,在物体与凹面镜的距离a(>0)、虚像与凹面镜的距离b(>0)以及凹面镜的焦距f(>a)之间,以下的关系式成立。根据该关系式,若凹面镜的曲率半径变大(镜的曲率变小),则凹面镜的焦距变长,焦距越长,虚像的距离b越短。
[0135]
1/a-1/b=1/f
[0136]
如上所述,通过从显示面23朝向视域200的图像光的光轴40p倾斜地配置显示面23,第一显示区域110也能够以沿着路面310的方式(成像距离从附近朝向远方逐渐变长的方式)配置。从显示面23投射到第一镜26的曲率半径大的第一区域251的第一图像光41的焦距(从第一区域251到焦点251f的距离)长,因此在被被投影部件2反射时,(与不增大曲率半径的情况相比)自被投影部件2的成像距离变短。
[0137]
本实施方式的中继光学系统25通过由通过的图像光显示的虚像越靠上方侧,越逐渐减小光焦度(逐渐增大曲率半径),从而能够使第一显示区域110的上端部111以从沿着路面310的倾斜立起的方式弯曲。上端部111以从沿着路面310的倾斜立起的方式弯曲是指,如图12b所示,上端部111中的第一显示区域110的切线与路面310之间的倾角θ(第一倾角θ1)大于比上端部111靠近驾驶员的中心部112中的第一显示区域110的切线与路面310之间的倾角θ(第二倾角θ2),并且倾角θ随着从中心部112(附近侧)朝向上端部111(远方侧)而连续地增加(单调增加)。
[0138]
即,hud装置20(hud装置50也同样)通过调整虚像光学系统90中的全部区域或一部分区域的光学特性、调整光学部件(例如,凹面镜26、56)和显示面23的配置、调整显示面23的形状或者这些的组合,能够设定显示区域100(110、120)的形状以及配置。
[0139]
如以上说明的那样,本实施方式的平视显示装置20、50具备:显示器21,上述显示器21具有射出图像光的显示面23;以及中继光学系统25,上述中继光学系统25使来自显示器21的图像光40经由被投影部件2朝向车辆1内的视域200,在从视域200内观察的显示区域100内视觉识别显示于显示面23的图像的虚像,显示区域100包括:上端部111、121、下端部113、123以及上端部111与下端部113之间的中心部112、122,是1)从视域200内的规定的眼睛位置200s观察的上端部111以及下端部113配置于比规定的基准平面300靠近视域200的位置,从规定的眼睛位置200s观察的中心部112配置于比基准平面300远离视域200的位置的第一曲面形状110,或着2)从规定的眼睛位置200s观察的上端部121以及下端部123配置于比规定的基准平面300远离视域200的位置,从规定的眼睛位置200s观察的中心部122是配置于比基准平面300靠近视域200的位置的第二曲面形状120,眼睛位置200s至上端部111、121的辐辏角与眼睛位置200s至通过上端部111、121的基准平面300上的第一点301的辐辏角的第一辐辏角差p11、p21、眼睛位置200s至中心部112、122的辐辏角与眼睛位置200s
至通过中心部112、122的基准平面300上的第二点302的辐辏角的第二辐辏角差p12、p22、以及眼睛位置200s至下端部113、123的辐辏角与眼睛位置200s至通过下端部113、123的基准平面300上的第三点303的辐辏角的第三辐辏角差p13、p23分别形成在4mrad以内。通过将作为显示虚像的区域的显示区域以视域侧凹进的形状配置为使相对于所希望的平面的上端以及下端成为跟前侧,使中间区域成为进深侧,通过将上端、下端以及中间区域与所希望的平面的辐辏角差设定为4mrad以内,能够使在显示区域内显示的虚像的进深方向的变形难以识别,即使在眼睛位置在上下方向上偏离的情况下,也能够抑制所希望的平面与显示区域的辐辏角差的局部增大。另外,通过将作为显示虚像的区域的显示区域以视域侧突出的形状配置为使相对于所希望的平面的上端以及下端成为进深侧,使中间区域成为跟前侧,通过将上端、下端以及中间区域与所希望的平面的辐辏角差设定为4mrad以内,能够使在显示区域内显示的虚像的进深方向的变形难以识别,即使在眼睛位置在上下方向上偏离的情况下,也能够抑制所希望的平面与显示区域的辐辏角差的局部增大。
[0140]
另外,在几个实施方式中,显示区域100也可以形成为,从视域200的视域上端201观察时,从视域200观察的上端部111配置于比基准平面300靠近视域200的位置,下端部113以及中心部112配置于比基准平面300远离视域200的位置,和/或从视域200的下端203观察时,从视域200观察的下端部113配置于比基准平面300靠近视域200的位置,上端部111以及中心部112配置于比基准平面300远离视域200的位置。这样,通过将视域的范围(视域的上端或下端)设定为显示区域的上端或下端在进深方向上跨越所希望的平面的范围,能够确保视域的范围较宽,并且即使在视域内眼睛位置在上下方向上偏离的情况下,也能够抑制所希望的平面与显示区域的辐辏角差的局部增大。
[0141]
另外,在几个实施方式中,显示区域100也可以形成为,从视域200的视域上端201观察时,上端部121配置于比基准平面300远离视域200的位置,下端部123以及中心部122配置于比基准平面300靠近视域200的位置,和/或从视域200的下端203观察时,下端部123配置于比基准平面300远离视域200的位置,上端部121以及中心部122配置于比基准平面300靠近视域200的位置。这样,通过将视域的范围(视域的上端或下端)设定为显示区域的上端或下端在进深方向上跨越所希望的平面的范围,能够确保视域的范围较宽,并且即使在视域内眼睛位置在上下方向上偏离的情况下,也能够抑制所希望的平面与显示区域的辐辏角差的局部增大。
[0142]
另外,在几个实施方式中,也可以是,规定的眼睛位置200s配置于视域中心205与下端203之间,显示区域100形成为,自规定的眼睛位置200s的第一辐辏角差p11、第二辐辏角差p12以及第三辐辏角差p13大致相等。显示区域100的形状、配置的变化的大小在视域内眼睛位置向上方向的偏离以及向下方向的偏离中不同。换言之,显示区域100的形状、配置相对于在视域内眼睛位置向上方向的偏离量的变化率与显示区域100的形状、配置相对于在视域内眼睛位置向下方向的偏离量的变化率不同。因此,在显示区域100的形状、配置相对于向下方向的偏离量的变化率大的情况下,通过将第一辐辏角差p11、第二辐辏角差p12以及第三辐辏角差p13大致相等的视域基准位置200s配置于视域中心205与下端203之间,即使眼睛位置4处于视域200的视域下端203,也能够抑制所希望的平面与显示区域的辐辏角差的局部增大。此外,规定的眼睛位置200s也可以配置于视域中心205与视域上端201之间。
[0143]
另外,在几个实施方式中,基准平面300也可以是从视域中心205的圆的切线。由此,从视域的中心观察的凹或凸形状的显示区域大致正对配置,即使在视域内眼睛位置变化的情况下,也能够将从基准平面的进深方向的偏离量抑制得较小。
[0144]
另外,在几个实施方式中,基准平面300也可以是从视域中心205的圆的切线,并且配置为相对于车辆的行进方向不平行。
[0145]
另外,在几个实施方式中,基准平面300也可以以从视域200观察上侧比下侧配置在远方的方式倾斜地配置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。