1.本实用新型涉及飞机操纵系统技术领域,尤其涉及一种飞机副翼差动控制装置。
背景技术:
2.副翼的差动偏转需通过副翼驱动机构实现,目前左右副翼由不同的副翼驱动机构驱动,两套副翼驱动机构相互独立互不干扰,通过控制左、右驱动电机反向运动实现左、右副翼的差分运动,这个驱动方式机构形式较为简单,但存在左、右副翼运动不同步的问题,左、右副翼可能出现运动相对滞后,同时两套驱动机构也更为复杂,成本也更高,存在一定缺陷。
技术实现要素:
3.针对上述技术问题,本实用新型提供了一种飞机副翼差动控制装置。
4.本实用新型解决上述技术问题的技术方案如下:
5.一种飞机副翼差动控制装置,所述飞机包括机身、机翼,所述机翼包括左机翼和右机翼,所述左机翼和右机翼与机身连接,所述左机翼机翼后缘设有左副翼和左襟翼,所述右机翼机翼后缘设有右副翼和右襟翼,还包括副翼差动控制装置,所述副翼差动控制装置包括控制模块、左副翼驱动机构和右副翼驱动机构,所述控制模块设置于所述机身上,所述控制模块包括伺服电机、机身传动组件,所述伺服电机输出轴与所述机身传动组件连接,所述机身传动组件分别与左副翼驱动机构和右副翼驱动机构连接。
6.进一步地,所述机身传动组件包括与伺服电机输出轴铰接的第一曲柄、与第一曲柄铰接的短传动杆、与短传动杆铰接的第二曲柄,所述第二曲柄分别与右副翼驱动机构、左副翼驱动机构连接。
7.进一步地,所述左副翼驱动机构和右副翼驱动机构结构相同,所述驱动机构包括与右副翼或左副翼连接的摆杆、与摆杆铰接的第四曲柄、与第四曲柄铰接的副翼传动杆,所述第四曲柄通过第二轴承座与右襟翼或左襟翼连接,所述副翼传动杆与机身传动组件连接。
8.进一步地,所述飞机副翼差动控制装置还包括动量检测组件、伺服电机控制器、微处理器;所述动量检测组件与伺服电机输出轴连接,所述动量检测组件与伺服电机控制器电连接,伺服电机控制器通过伺服电机控制线控制电机运转,伺服电机控制器通过总线连接到所述微处理器。
9.进一步地,所述动量检测组件为编码器。
10.与现有技术相比,本实用新型具有如下技术效果:
11.(1)控制模块驱动左副翼驱动机构和右副翼驱动机构同时运动,通过机械传动有效保证了左副翼、右副翼偏转的同步性;且单个伺服电机的驱动结构简单,成本低;
12.(2)伺服电机驱动短传动杆运动,通过曲柄带动右副翼传动杆和左副翼传动杆运动,伺服电机将转动位移传输给左副翼和右副翼,并使左副翼和右副翼产生相应的舵偏角,
从而调节飞机的飞行姿态,实现左副翼和右副翼的差动偏转;
13.(3)编码器检测舵面转动量,将检测到的数据传送至伺服电机控制器,伺服电机驱动器将编码器反馈的数据传输给微处理器,微处理器会给伺服控制器一控制信号,伺服电机执行控制命令,伺服电机将转动位移传输给左副翼驱动机构和右副翼驱动机构,调整右副翼和左副翼的舵偏角。
附图说明
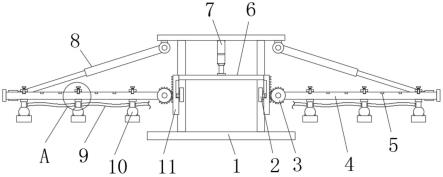
14.图1为本实用新型的结构示意图;
15.图2为本实用新型的图1的正视图;
16.图3为本实用新型的图1中b处放大示意图;
17.图4为本实用新型的图1中d处放大示意图;
18.图5为本实用新型的图2中c处放大示意图;
19.图6为本实用新型的图1中e-e方向示意图。
20.在附图中,各标号所表示的部件名称列表如下:
21.1、机身;2、左副翼;3、右副翼;4、伺服电机;5、第一曲柄;6、短传动杆;7、第二曲柄;8、第一轴承座;9、右副翼传动杆;10、左副翼传动杆;11、第四曲柄;12、第二轴承座;13、摆杆;14、编码器。
具体实施方式
22.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
23.参照图1-图6,本实施例公开了一种飞机副翼差动控制装置,飞机包括机身1、机翼,所述机翼包括左机翼和右机翼,所述左机翼和右机翼与机身1连接,所述左机翼机翼后缘设有左副翼2和左襟翼,所述右机翼机翼后缘设有右副翼3和右襟翼,还包括副翼差动控制装置,所述副翼差动控制装置包括控制模块、左副翼驱动机构和右副翼驱动机构,所述控制模块设置于所述机身1上,控制模块包括伺服电机4、机身传动组件,所述伺服电机输出轴与所述机身传动组件连接,所述机身传动组件分别与左副翼驱动机构和右副翼驱动机构连接。
24.左副翼2、右副翼3对称布置于左机翼、右机翼后缘,用于调节飞机飞行姿态,当左副翼2、右副翼3中立时,飞机平飞;当左副翼2、右副翼3反向偏转(差动)时,飞机滚转。本实施例中控制模块驱动左副翼驱动机构和右副翼驱动机构同时运动,通过机械传动有效保证了左副翼2、右副翼3偏转的同步性。
25.本实施例中,机身传动组件包括与伺服电机输出轴铰接的第一曲柄5、与第一曲柄铰接的短传动杆6、与短传动杆铰接的第二曲柄7,所述第二曲柄7分别与右副翼驱动机构、左副翼驱动机构连接,其中,第二曲柄7通过第一轴承座8固定在机身1上。
26.伺服电机4驱动短传动杆6运动,通过第二曲柄7带动左副翼驱动机构、右副翼驱动机构,伺服电机将转动位移输给左副翼驱动机构和右副翼驱动机构,并使副翼2和右副翼3产生相应的舵偏角,从而调节飞机的飞行姿态,实现左副翼2和右副翼3的差动偏转。
27.本实施例中,左副翼驱动机构和右副翼驱动机构结构相同,所述驱动机构包括与
右副翼3或左副翼2连接的摆杆13、与摆杆13铰接的第四曲柄11、与第四曲柄11铰接的副翼传动杆,所述第四曲柄11通过第二轴承座12与右襟翼或左襟翼连接,所述副翼传动杆与机身传动组件连接。
28.左副翼驱动机构和右副翼驱动机构作为副翼的机械传动装置,一方面连接控制模块,另一方面连接右副翼3或左副翼2。根据飞行姿态控制需求,左副翼2、右副翼3用于控制飞行器滚转,右副翼驱动机构的各部件形状与左副翼驱动机构中对应的各部件相同,左副翼2和右副翼3上偏或下偏的差动量,通过改变摆杆13拉动副翼实现,且左副翼驱动机构和右副翼驱动机共用同一动力源,保障了左副翼2、右副翼3运动过程中具有良好的同步性。
29.具体的,伺服电机4驱动短传动杆6运动,通过第二曲柄7带动,进而带动右副翼传动杆9和左副翼传动杆10摆动,再通过右副翼传动杆9和左副翼传动杆10带动轴承座上的第四曲柄11,通过第四曲柄11带动摆杆13,拉动左副翼2、右副翼3,使左副翼2、右副翼3能够同时上下摆动。
30.在一些实施例中,飞机副翼差动控制装置包括动量检测组件、伺服电机控制器、微处理器;所述动量检测组件与伺服电机输出轴连接,所述动量检测组件与伺服电机控制器电连接,伺服电机控制器通过伺服电机控制线控制伺服电机4运转,伺服电机4控制器通过总线连接到所述微处理器。所述动量检测组件为编码器14。
31.伺服电机输出轴末端装有编码器,编码器检测舵面转动量,将检测到的数据传送至伺服电机控制器,伺服电机驱动器将编码器14反馈地数据传输给微处理器,微处理器会给伺服控制器一控制信号,即一位移指令,伺服电机4执行控制命令,伺服电机4将转动位移传输给左副翼驱动机构和右副翼驱动机构,调节飞机的飞行姿态,实现左副翼2和右副翼3的差动偏转。
32.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。