技术特征:
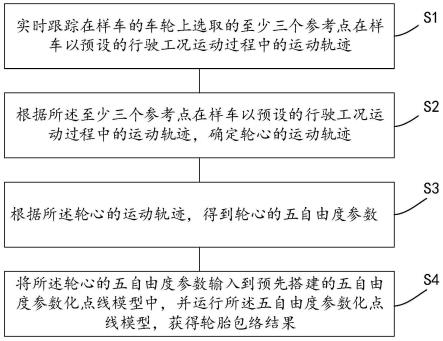
1.一种车辆轮胎包络设计方法,其特征在于,包括:实时跟踪在样车的车轮上选取的至少三个参考点在样车以预设的行驶工况运动过程中的运动轨迹;根据所述至少三个参考点在样车以预设的行驶工况运动过程中的运动轨迹,确定轮心的运动轨迹;根据所述轮心的运动轨迹,得到轮心的五自由度参数;将所述轮心的五自由度参数输入到预先搭建的五自由度参数化点线模型中,并运行所述五自由度参数化点线模型,获得轮胎包络结果。2.如权利要求1所述的车辆轮胎包络设计方法,其特征在于,所述实时跟踪在样车的车轮上选取的至少三个参考点在样车以预设的行驶工况运动过程中的运动轨迹,具体包括:基于运动前的样车建立第一坐标系,并获取在样车运动前至少三个参考点在所述第一坐标系的三维坐标;基于以预设的行驶工况运动的样车建立随着样车运动实时变化的第二坐标系,并获取所述至少三个参考点在各个运动时刻的所述第二坐标系中的三维坐标。3.如权利要求2所述的车辆轮胎包络设计方法,其特征在于,所述根据所述至少三个参考点在样车以预设的行驶工况运动过程中的运动轨迹,确定轮心的运动轨迹,具体包括:获取与轮心距离为预设值的轮心参考位置在所述第一坐标系中的三维坐标;其中,所述轮心参考位置位于车轮的旋转轴线上;根据所述轮心参考位置在所述第一坐标系中的三维坐标,确定轮心在所述第一坐标系中的三维坐标;根据所述轮心参考位置在所述第一坐标系中的三维坐标、所述在样车运动前至少三个参考点在所述第一坐标系的三维坐标以及所述至少三个参考点在各个运动时刻的所述第二坐标系中的三维坐标,确定所述轮心参考位置在各个运动时刻的所述第二坐标系中的三维坐标;根据所述轮心参考位置在各个运动时刻的所述第二坐标系中的三维坐标,确定轮心在各个运动时刻的所述第二坐标系中的三维坐标。4.如权利要求3所述的车辆轮胎包络设计方法,其特征在于,所述根据所述轮心参考位置在所述第一坐标系中的三维坐标、所述在样车运动前至少三个参考点在所述第一坐标系的三维坐标以及所述至少三个参考点在各个运动时刻的所述第二坐标系中的三维坐标,确定所述轮心参考位置在各个运动时刻的所述第二坐标系中的三维坐标,具体包括:对于每一运动时刻,均进行以下轮心参考位置确定操作:根据所述在样车运动前至少三个参考点在所述第一坐标系的三维坐标以及所述至少三个参考点在当前运动时刻的第二坐标系中的三维坐标,确定至少三个参考点在当前运动时刻的x、y、z轴上的平移向量;根据所述至少三个参考点在当前运动时刻的x、y、z轴上的平移向量,确定与当前轮心参考位置对应的平移向量;根据所述在样车运动前至少三个参考点在所述第一坐标系的三维坐标以及所述至少三个参考点在当前运动时刻的所述第二坐标系中的三维坐标,确定与当前轮心参考位置对应的反对称矩阵;
根据所述与当前轮心参考位置对应的反对称矩阵,构造与当前轮心参考位置对应的旋转矩阵;根据所述与当前轮心参考位置对应的平移向量、所述与当前轮心参考位置对应的旋转矩阵以及所述轮心参考位置在所述第一坐标系中的三维坐标,确定所述轮心参考位置在当前运动时刻的所述第二坐标系中的三维坐标。5.如权利要求4所述的车辆轮胎包络设计方法,其特征在于,所述根据所述在样车运动前至少三个参考点在所述第一坐标系的三维坐标以及所述至少三个参考点在当前运动时刻的所述第二坐标系中的三维坐标,确定与当前轮心参考位置对应的反对称矩阵,具体包括:从所述至少三个参考点中选取三个参考点作为运算参考点;通过以下公式确定与当前轮心参考位置对应的反对称矩阵:通过以下公式确定与当前轮心参考位置对应的反对称矩阵:其中,s为与当前轮心参考位置对应的反对称矩阵,x
aij
为运算参考点i和运算参考点j在第一坐标系中的x轴上的坐标差值,y
aij
为运算参考点i和运算参考点j在第一坐标系中的y轴上的坐标差值,z
aij
为运算参考点i和运算参考点j在第一坐标系中的z轴上的坐标差值;x
bij
为运算参考点i和运算参考点j在当前运动时刻的所述第二坐标系中的x轴上的坐标差值,y
bij
为运算参考点i和运算参考点j在当前运动时刻的所述第二坐标系中的y轴上的坐标差值,z
bij
为运算参考点i和运算参考点j在当前运动时刻的所述第二坐标系中的z轴上的坐标差值;所述根据所述与当前轮心参考位置对应的反对称矩阵,构造与当前轮心参考位置对应的旋转矩阵,具体包括:通过以下公式构造与当前轮心参考位置对应的旋转矩阵:其中,r为与当前轮心参考位置对应的旋转矩阵,i为单位矩阵。6.如权利要求5所述的车辆轮胎包络设计方法,其特征在于,所述根据所述与当前轮心参考位置对应的平移向量、所述与当前轮心参考位置对应的旋转矩阵以及所述轮心参考位置在所述第一坐标系中的三维坐标,确定所述轮心参考位置在当前运动时刻的所述第二坐标系中的三维坐标,具体包括:通过以下公式计算所述轮心参考位置在当前运动时刻的所述第二坐标系中的三维坐标:
其中,为所述轮心参考位置在所述第一坐标系中的三维坐标,为与当前轮心参考位置对应的平移向量,r为与当前轮心参考位置对应的旋转矩阵,为所述轮心参考位置在第二坐标系中的三维坐标。7.如权利要求3所述的车辆轮胎包络设计方法,其特征在于,所述根据所述轮心的运动轨迹,得到轮心的五自由度参数,具体包括:根据所述轮心在所述第一坐标系中的三维坐标以及所述轮心在各个运动时刻的所述第二坐标系中的三维坐标,确定轮心沿x、y、z轴方向的移动自由度;将所述第一坐标系的原点分别与各个运动时刻的所述第二坐标系的原点重合,确定所述至少三个参考点在各个运动时刻的向量坐标;根据所述至少三个参考点在各个运动时刻的向量坐标,确定轮心绕x、z轴方向的旋转自由度;将所述轮心沿x、y、z轴方向的移动自由度和所述轮心绕x、z轴方向的旋转自由度作为轮心的五自由度参数。8.如权利要求2所述的车辆轮胎包络设计方法,其特征在于,所述基于运动前的样车建立第一坐标系,并获取在样车运动前至少三个参考点在所述第一坐标系的三维坐标,具体包括:采用拍摄装置实时跟踪所述至少三个参考点,基于运动前的样车建立第一坐标系,并基于拍摄画面获取在样车运动前至少三个参考点在所述第一坐标系的三维坐标;所述基于以预设的行驶工况运动的样车建立随着样车运动实时变化的第二坐标系,并获取所述至少三个参考点在各个运动时刻的所述第二坐标系中的三维坐标,具体包括:基于以预设的行驶工况运动的样车建立随着样车运动实时变化的第二坐标系,并基于拍摄画面获取所述至少三个参考点在各个运动时刻的所述第二坐标系中的三维坐标。9.如权利要求8所述的车辆轮胎包络设计方法,其特征在于,所述拍摄装置为高速摄像机。10.一种车辆轮胎包络设计装置,其特征在于,包括:参考点运动轨迹跟踪模块,用于实时跟踪在样车的车轮上选取的至少三个参考点在样车以预设的行驶工况运动过程中的运动轨迹;轮心运动轨迹确定模块,用于根据所述至少三个参考点在样车以预设的行驶工况运动过程中的运动轨迹,确定轮心的运动轨迹;轮心五自由度参数获取模块,用于根据所述轮心的运动轨迹,得到轮心的五自由度参数;轮胎包络获取模块,用于将所述轮心的五自由度参数输入到预先搭建的五自由度参数化点线模型中,并运行所述五自由度参数化点线模型,获得轮胎包络结果。
技术总结
本发明公开了一种车辆轮胎包络设计方法,所述方法通过实时跟踪在样车的车轮上选取的至少三个参考点在样车以预设的行驶工况运动过程中的运动轨迹,并根据所述至少三个参考点在样车以预设的行驶工况运动过程中的运动轨迹,确定轮心的运动轨迹,并根据轮心的运动轨迹,确定轮心的五自由度参数,再将所述轮心的五自由度参数输入到预先搭建的五自由度参数化点线模型中,并运行所述五自由度参数化点线模型,获得轮胎包络结果,其通过对实车的运动状态进行分析,实现轮胎包络的逆向测绘,能显著提高轮胎包络的精度,并大大减小轮胎包络的尺寸,提高了空间利用率。相应地,本发明实施例还提供一种车辆轮胎包络设计装置。还提供一种车辆轮胎包络设计装置。还提供一种车辆轮胎包络设计装置。
技术研发人员:陆革威 黄远洋 涂大鹏 杨勇
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:2021.06.09
技术公布日:2022/10/20
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。