1.本发明涉及纸尿裤生产技术领域,具体为一种智能化的纸尿裤生产线上的环腰转移装置。
背景技术:
2.纸尿裤的核心关键技术是芯体,从技术层面来说,纸尿裤芯体至今共经历了三次革命,纸尿裤是一次性使用后即可抛弃的产品,以无纺布、卫生纸、绒毛浆、高分子吸水树脂、pe膜、橡皮筋等材料制成,有幼儿专用与成人专用两种,纸尿裤的护腰部位加工复杂,而纸尿裤护腰部位是通过多层无纺布复合有若干条弹力橡筋,无纺布需要与纸尿裤护腰部位的长度吻合,不需要重新裁剪,而传统护腰部位的无纺布都是采用现购的裁剪好的成品,直接与加工半成品的纸尿裤复合而成,这种加工方式存在加工成本高,而且不能根据生产过的纸尿裤的大小而定,造成加工复杂,产品质量差,现有技术领域内,申请公布号为cn108451720a的发明提供一种智能化的纸尿裤生产线上的环腰转移装置,包括安装板,轴承座,连接轴承,插接轴,联轴器,电机,连接轮,连通管道,密封盖,输气管,气泵,电磁阀门,出气头架结构,防护管结构,调节架结构,清理架结构和收集盒结构,所述的轴承座螺栓安装在安装板正表面的横向中间部位,并在内部安装有连接轴承;所述的插接轴插接在连接轴承的内部,并使左端通过联轴器与电机的输出轴连接。本发明的有益效果为:通过出气头架结构的设置,有利于在使用时,可以调节该出气头架结构上部的大小,同时也方便的吸住不同大小的环腰,进一步有利于方便的使用该环腰转移装置,但是上述环腰转移装置还存在如下问题:首先该装置只能调节两侧吸盘间距,导致其只能对环腰进行简单吸附并且吸附强度有限,其次由于环腰加工后表面纤维材质在静电作用下容易粘连吸附,进而需要工作人员手动进行分离。
技术实现要素:
3.本发明的目的在于提供一种智能化的纸尿裤生产线上的环腰转移装置,以至少解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种智能化的纸尿裤生产线上的环腰转移装置,包括:
5.龙门架;
6.控制模块,设在所述龙门架的右后方;
7.搬运翻转机构,沿前后方向设置在所述龙门架的顶端;
8.转运机构,安装在所述龙门架的右侧前端;
9.进料输送带,沿左右方向设置在所述龙门架的内侧前端,所述进料输送带和控制模块电性连接;
10.出料输送带,沿左右方向设置在所述龙门架的内侧后端,所述出料输送带和控制模块电性连接;
11.检测摄像头,安装在所述龙门架的右侧前端,所述检测摄像头和控制模块电性连接;
12.检测摄像头,沿前后方向设置在所述龙门架的右侧且位于搬运组件的上方,所述检测摄像头和控制模块电性连接。
13.优选的,为了实现腰环工件进行搬运翻转,所述搬运翻转机构包括:第一限位导轨、第一水平移动模块、移动平台、对中移动模块、第一电推杆、安装座、第一旋转模块、夹持模块、剪式升降模块和电动吸盘;所述第一限位导轨的数量为两个,两个所述第一限位导轨分别沿前后方向设置在龙门架的顶端开口处左右两侧;第一水平移动模块沿前后方向安装在所述龙门架的顶端左侧,所述第一水平移动模块和控制模块电性连接;移动平台沿左右方向设置在左右两个所述第一限位导轨的限位端,所述第一水平移动模块的移动端与移动平台固定连接;对中移动模块插接在所述移动平台的限位端,所述对中移动模块和控制模块电性连接;第一电推杆设置在所述移动平台的顶端中部,所述第一电推杆的伸缩端延伸出移动平台的下表面并与对中移动模块的顶端固定连接,所述第一电推杆和控制模块电性连接;所述安装座的数量为两个,两个所述安装座分别安装在对中移动模块的底部左右两侧移动端;所述第一旋转模块的数量为两个,两个所述第一旋转模块分别安装在左右两个安装座的外侧,所述第一旋转模块的转动端延伸进安装座的内侧,所述第一旋转模块和控制模块电性连接;所述夹持模块的数量为两个,两个所述夹持模块分别安装在左右两个第一旋转模块的转动端,所述夹持模块和控制模块电性连接;剪式升降模块设置在所述对中移动模块的底端中部,所述剪式升降模块和控制模块电性连接;电动吸盘安装在所述剪式升降模块的升降端,所述电动吸盘和控制模块电性连接。
14.优选的,为了实现粘连工件分离后的转运,所述转运机构包括:第二水平移动模块、第二旋转模块、安装架、槽体外壳、搬运组件、第二限位导轨、连接座、分离单元、传动皮带和伺服电机;第二水平移动模块沿左右方向设置在所述龙门架的右侧且位于搬运组件的上方,所述第二水平移动模块和控制模块电性连接;第二旋转模块设置在所述第二水平移动模块的移动端,所述第二旋转模块和控制模块电性连接;安装架安装在所述第二旋转模块的转动端;槽体外壳沿前后方向设置在所述安装架的右侧;搬运组件设置在所述槽体外壳的顶端中部;所述第二限位导轨的数量为两个,两个所述第二限位导轨分别沿前后方向设置在槽体外壳的内腔左侧上下两端;所述连接座的数量为两个,两个所述连接座分别安装在上下两个第二限位导轨的限位端;所述分离单元的数量为两个,两个所述分离单元分别设置在上下两个连接座的右端;传动皮带沿前后方向通过销轴转动连接在所述第二限位导轨的内腔,上下两个所述连接座分别与传动皮带的外壁上下两侧固定连接;伺服电机设置在所述槽体外壳的内腔,所述伺服电机的输出端与传动皮带的轴心固定连接,所述伺服电机和控制模块电性连接。
15.优选的,上下两个所述连接座与分离单元连接位置位于同一水平高度。
16.优选的,为了实现对环腰工件进行多点吸附固定,所述搬运组件包括:搬运组件外壳、电动分流阀、移动卡槽座、气动吸盘、剪式伸缩架、第二电推杆和连接架;搬运组件外壳沿左右方向设置在所述槽体外壳的顶端中部,所述搬运组件外壳的内腔底端与外部贯通;电动分流阀设置在所述搬运组件外壳的顶端左侧;所述移动卡槽座的数量为三个,三个所述移动卡槽座分别从左至右间隙套接在搬运组件外壳的外壁下方,所述电动分流阀和控制
模块电性连接;所述气动吸盘的数量为三组,每组所述气动吸盘的数量为两个,三组所述气动吸盘分别设置在移动卡槽座的底端前后两侧,所述气动吸盘能够与电动分流阀通过导管进行连接;剪式伸缩架沿左右方向设置在所述搬运组件外壳的内腔后侧;第二电推杆设置在所述搬运组件外壳的内腔顶端,所述第二电推杆的伸缩端与剪式伸缩架的左侧通过连接架固定连接,所述第二电推杆和控制模块电性连接;所述连接架的数量为三个,三个所述连接架分别从左至右间隙设置在剪式伸缩架的伸缩端,所述连接架的底端延伸出搬运组件外壳的下表面并与移动卡槽座的顶端固定连接。
17.优选的,为了实现对粘连工件的分离,所述分离单元包括:基座、电动阀、压紧外壳、槽体、气囊、切割刀和限位弹簧;基座沿左右方向设置在所述连接座的右侧,所述基座的右侧贯穿槽体外壳的内腔;所述电动阀的数量为三个,三个所述电动阀分别间隙设置在基座的外侧,所述电动阀能够与电动分流阀通过导管进行连接,所述电动阀和控制模块电性连接;压紧外壳沿左右方向设置在所述基座的顶端外侧;槽体沿左右方向开设在所述基座的顶端内侧且位于压紧外壳的内侧下方;所述气囊的数量为三个,三个所述气囊分别间隙设置在槽体的内腔;切割刀左右方向插接在压紧外壳的内侧;所述限位弹簧的数量为若干个,若干个所述限位弹簧分别间隙安装在限位弹簧的外侧顶端,所述限位弹簧的顶端与压紧外壳的内壁顶端固定连接。
18.优选的,所述基座的纵截面形状为直角三角形。
19.与现有技术相比,本发明的有益效果是:该智能化的纸尿裤生产线上的环腰转移装置:
20.1、通过第二水平移动模块驱动搬运组件和分离单元移动,剪式伸缩架在连接架的配合下驱动移动卡槽座带动气动吸盘在搬运组件外壳外侧移动,进而使三个移动卡槽座驱动气动吸盘进行同步变距以适配不同工件型号,电动分流阀控制气动吸盘对工件进行吸附,伺服电机在传动皮带和连接座配合下驱动对应位置上分离单元向内侧移动,电动阀控制气囊的进气量使其间歇性膨胀收缩,进而使切割刀上下震动提高分离效果;
21.2、通过第二旋转模块驱动安装架带动工件转动,第一电推杆驱动对中移动模块移动至指定高度位置,剪式升降模块驱动电动吸盘下降至指定位置,电动吸盘对工件吸附,对中移动模块驱动夹持模块向内侧移动,夹持模块对工件夹持后第一旋转模块驱动夹持模块进行翻转,第一水平移动模块驱动移动平台移动至指定位置,进而完成工件的翻转和转移;
22.从而可实现对环腰工件进行多点吸附搬运翻转同时,调节多个吸盘间距使其适配不同形状大小工件提高吸附强度,并且可对于由于静电作用下粘连吸附的工件进行自动分离。
附图说明
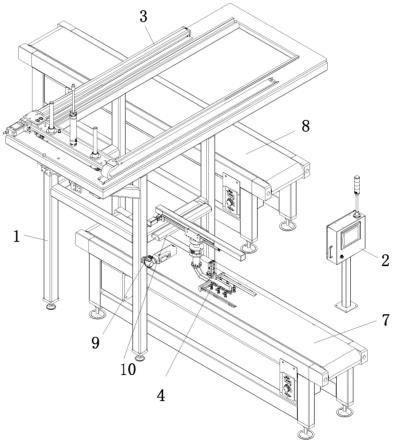
23.图1为本发明的结构示意图;
24.图2为图1的搬运翻转机构爆炸图;
25.图3为图1的转运机构爆炸图;
26.图4为图3的搬运组件爆炸图;
27.图5为图3的分离单元爆炸图。
28.图中:1、龙门架,2、控制模块,3、搬运翻转机构,31、第一限位导轨,32、第一水平移
动模块,33、移动平台,34、对中移动模块,35、第一电推杆,36、安装座,37、第一旋转模块,38、夹持模块,39、剪式升降模块,310、电动吸盘,4、转运机构,41、第二水平移动模块,42、第二旋转模块,43、安装架,44、槽体外壳,45、第二限位导轨,46、连接座,47、传动皮带,48、伺服电机,5、搬运组件,51、搬运组件外壳,52、电动分流阀,53、移动卡槽座,54、气动吸盘,55、剪式伸缩架,56、第二电推杆,57、连接架,6、分离单元,61、基座,62、电动阀,63、压紧外壳,64、槽体,65、气囊,66、切割刀,67、限位弹簧,7、进料输送带,8、出料输送带,9、检测摄像头,10、红外光栅。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.请参阅图1-5,本发明提供一种技术方案:一种智能化的纸尿裤生产线上的环腰转移装置,包括:龙门架1、控制模块2、搬运翻转机构3、转运机构4、进料输送带7、出料输送带8、检测摄像头9和红外光栅10;控制模块2设在龙门架1的右后方,控制模块2可通过工作人员手动进行控制,控制模块2内部预置有程序并可按照逻辑程序进行控制启动,控制模块2可与外部电源进行连接以对装置内部电器件进行供电;搬运翻转机构3沿前后方向设置在龙门架1的顶端;转运机构4安装在龙门架1的右侧前端;进料输送带7沿左右方向设置在龙门架1的内侧前端,进料输送带7和控制模块2电性连接,进料输送带7可通过控制模块2进行控制,对环腰工件从右至左进行输送;出料输送带8沿左右方向设置在龙门架1的内侧后端,出料输送带8和控制模块2电性连接,出料输送带8可通过控制模块2进行控制,对环腰工件从右至左进行输送;检测摄像头9安装在龙门架1的右侧前端,检测摄像头9和控制模块2电性连接,检测摄像头9可通过控制模块2进行控制,检测摄像头9侦测到进料输送带7表面环腰工件上下粘连时,检测摄像头9向控制模块2内部发送信号;红外光栅10沿前后方向设置在龙门架1的右侧且位于搬运组件5的上方,红外光栅10和控制模块2电性连接,红外光栅10可通过控制模块2进行控制,红外光栅10侦测到进料输送带7表面分离后的工件或正常未粘连的工件通过时,红外光栅10向控制模块2内部发送信号。
31.作为优选方案,更进一步的,如图2,为了实现腰环工件进行搬运翻转,搬运翻转机构3包括:第一限位导轨31、第一水平移动模块32、移动平台33、对中移动模块34、第一电推杆35、安装座36、第一旋转模块37、夹持模块38、剪式升降模块39和电动吸盘310;第一限位导轨31的数量为两个,两个第一限位导轨31分别沿前后方向设置在龙门架1的顶端开口处左右两侧;第一水平移动模块32沿前后方向安装在龙门架1的顶端左侧,第一水平移动模块32和控制模块2电性连接,第一水平移动模块32可通过控制模块2进行控制,第一水平移动模块32可驱动移动平台33前后移动;移动平台33沿左右方向设置在左右两个第一限位导轨31的限位端,第一水平移动模块32的移动端与移动平台33固定连接;对中移动模块34插接在移动平台33的限位端,对中移动模块34和控制模块2电性连接,对中移动模块34可通过控制模块2进行控制,对中移动模块34可驱动两侧安装座36内外移动;第一电推杆35设置在移动平台33的顶端中部,第一电推杆35的伸缩端延伸出移动平台33的下表面并与对中移动模
块34的顶端固定连接,第一电推杆35和控制模块2电性连接,第一电推杆35可通过控制模块2进行控制,第一电推杆35可通过自身伸长缩短驱动对中移动模块34移动至指定高度位置;安装座36的数量为两个,两个安装座36分别安装在对中移动模块34的底部左右两侧移动端;第一旋转模块37的数量为两个,两个第一旋转模块37分别安装在左右两个安装座36的外侧,第一旋转模块37的转动端延伸进安装座36的内侧,第一旋转模块37和控制模块2电性连接;夹持模块38的数量为两个,两个夹持模块38分别安装在左右两个第一旋转模块37的转动端,夹持模块38和控制模块2电性连接,夹持模块38可通过控制模块2进行控制,夹持模块38可对工件进行夹持固定;剪式升降模块39设置在对中移动模块34的底端中部,剪式升降模块39和控制模块2电性连接,剪式升降模块39可通过控制模块2进行控制,剪式升降模块39可通过自身升降调节电动吸盘310高度位置;电动吸盘310安装在剪式升降模块39的升降端,电动吸盘310和控制模块2电性连接,电动吸盘310可通过控制模块2进行控制,电动吸盘310对工件进行吸附固定。
32.作为优选方案,更进一步的,如图,为了实现粘连工件分离后的转运,转运机构4包括:第二水平移动模块41、第二旋转模块42、安装架43、槽体外壳44、搬运组件5、第二限位导轨45、连接座46、分离单元6、传动皮带47和伺服电机48;第二水平移动模块41沿左右方向设置在龙门架1的右侧且位于搬运组件5的上方,第二水平移动模块41和控制模块2电性连接,第二水平移动模块41可通过控制模块2进行控制,第二水平移动模块41可驱动第二旋转模块42左右移动;第二旋转模块42设置在第二水平移动模块41的移动端,第二旋转模块42和控制模块2电性连接,第二旋转模块42可通过控制模块2进行控制,第二旋转模块42可驱动安装架43水平转动;安装架43安装在第二旋转模块42的转动端;槽体外壳44沿前后方向设置在安装架43的右侧;搬运组件5设置在槽体外壳44的顶端中部;第二限位导轨45的数量为两个,两个第二限位导轨45分别沿前后方向设置在槽体外壳44的内腔左侧上下两端;连接座46的数量为两个,两个连接座46分别安装在上下两个第二限位导轨45的限位端;分离单元6的数量为两个,两个分离单元6分别设置在上下两个连接座46的右端;传动皮带47沿前后方向通过销轴转动连接在第二限位导轨45的内腔,上下两个连接座46分别与传动皮带47的外壁上下两侧固定连接;伺服电机48设置在槽体外壳44的内腔,伺服电机48的输出端与传动皮带47的轴心固定连接,伺服电机48和控制模块2电性连接,伺服电机48可通过控制模块2进行控制,伺服电机48可驱动传动皮带47周向转动。
33.作为优选方案,更进一步的,上下两个连接座46与分离单元6连接位置位于同一水平高度,两侧连接座46可驱动对应位置上分离单元6同步向内侧移动。
34.作为优选方案,更进一步的,如图4,为了实现对环腰工件进行多点吸附固定,并可可对吸附位置间距进行同步调节使其适配不同形状大小工件,搬运组件5包括:搬运组件外壳51、电动分流阀52、移动卡槽座53、气动吸盘54、剪式伸缩架55、第二电推杆56和连接架57;搬运组件外壳51沿左右方向设置在槽体外壳44的顶端中部,搬运组件外壳51的内腔底端与外部贯通;电动分流阀52设置在搬运组件外壳51的顶端左侧,电动分流阀52和控制模块2电性连接,电动分流阀52可与外部气泵总成进行连接,并通过控制模块2进行控制气动吸盘54的吸附;移动卡槽座53的数量为三个,三个移动卡槽座53分别从左至右间隙套接在搬运组件外壳51的外壁下方,卡槽座53可在搬运组件外壳51的外壁左右移动;气动吸盘54的数量为三组,每组气动吸盘54的数量为两个,三组气动吸盘54分别设置在移动卡槽座53
的底端前后两侧,气动吸盘54能够与电动分流阀52通过导管进行连接;剪式伸缩架55沿左右方向设置在搬运组件外壳51的内腔后侧,剪式伸缩架55可进行折叠以及伸缩;第二电推杆56设置在搬运组件外壳51的内腔顶端,第二电推杆56的伸缩端与剪式伸缩架55的左侧通过连接架固定连接,第二电推杆56和控制模块2电性连接,第二电推杆56可通过控制模块2进行控制伸长缩短;连接架57的数量为三个,三个连接架57分别从左至右间隙设置在剪式伸缩架55的伸缩端,连接架57的底端延伸出搬运组件外壳51的下表面并与移动卡槽座53的顶端固定连接。
35.作为优选方案,更进一步的,如图5,为了使切割刀66向内侧移动同时自身进行上下方向震动,进而实现提高切割刀66分离效果,分离单元6包括:基座61、电动阀62、压紧外壳63、槽体64、气囊65、切割刀66和限位弹簧67;基座61沿左右方向设置在连接座46的右侧,基座61的右侧贯穿槽体外壳44的内腔;电动阀62的数量为三个,三个电动阀62分别间隙设置在基座61的外侧,电动阀62能够与电动分流阀52通过导管进行连接,电动阀62和控制模块2电性连接,电动阀62可与外部气泵总成进行连接,并通过控制模块2进行控制,电动阀62可控制气囊65的进气量,实现气囊65膨胀收缩;压紧外壳63沿左右方向设置在基座61的顶端外侧;槽体64沿左右方向开设在基座61的顶端内侧且位于压紧外壳63的内侧下方;气囊65的数量为三个,三个气囊65分别间隙设置在槽体64的内腔;切割刀66左右方向插接在压紧外壳63的内侧;限位弹簧67的数量为若干个,若干个限位弹簧67分别间隙安装在限位弹簧67的外侧顶端,限位弹簧67的顶端与压紧外壳63的内壁顶端固定连接,限位弹簧67可对切割刀66限位同时对其进行复位。
36.作为优选方案,更进一步的,基座61的纵截面形状为直角三角形,进而使切割刀66倾斜设置。
37.工作原理如下:
38.步骤1:工作人员控制控制模块2依次启动进料输送带7和检测摄像头9,环腰沿进料输送带7进行输送,当检测摄像头9侦测到环腰工件上下粘连时,检测摄像头9向控制模块2内部发送信号,使控制模块2内部预置程序控制第二水平移动模块41、第二电推杆56、电动分流阀52、伺服电机48和电动阀62,第二水平移动模块41驱动第二旋转模块42在安装架43和槽体外壳44的配合带动搬运组件5和分离单元6移动至工件上方,第二电推杆56伸长缩短驱动剪式伸缩架55进行伸缩,进而使剪式伸缩架55驱动连接架57进行伸缩移动,并在连接架57的配合下驱动移动卡槽座53带动气动吸盘54在搬运组件外壳51外侧移动,进而使三个移动卡槽座53驱动气动吸盘54进行同步变距以适配不同工件型号,电动分流阀52预先与外部装气泵进行连接,并通过电动分流阀52控制气动吸盘54对工件进行吸附,伺服电机48驱动传动皮带47转动,进而使连接座46在传动皮带47旋转力的作用下和在第二限位导轨45的限位作用下向内侧移动,促使两侧连接座46驱动对应位置上分离单元6同步向内侧移动,基座61驱动切割刀66向内侧移动同时,电动阀62控制气囊65的进气量,促使气囊65间歇性膨胀收缩,进而使气囊65推动切割刀66在压紧外壳63内侧上下震动,提高切割刀66的分离剥开效果;
39.步骤2:切割刀66将粘连的腰带工件上下分离后,工作人员控制控制模块2依次启动第二水平移动模块41、第二旋转模块42和红外光栅10,第二水平移动模块41驱动第二旋转模块42复位后,第二旋转模块42驱动安装架43在槽体外壳44的配合下带动搬运组件5和
分离单元6转动至龙门架1内侧,红外光栅10检测到分离后的工件或正常未粘连的工件通过时,红外光栅10向控制模块2内部发送信号,促使控制模块2内部预置程序控制第一电推杆35、剪式升降模块39、电动吸盘310、对中移动模块34、第一旋转模块37、夹持模块38、第一水平移动模块32和出料输送带8,第一电推杆35伸长缩短驱动对中移动模块34移动至指定高度位置,剪式升降模块39伸长驱动电动吸盘310下降至指定高度位置,电动吸盘310对工件进行吸附,对中移动模块34驱动安装座36带动夹持模块38向内侧移动,夹持模块38对工件夹持同时电动吸盘310停止对工件进行吸附解除对其的固定,第一旋转模块37驱动夹持模块38进行翻转后电动吸盘310再次对工件进行吸附,第一水平移动模块32驱动移动平台33在第一限位导轨31的限位作用下前后移动至指定位置,并使工件移动至出料输送带8上方,出料输送带8对工件进行运输,进而完成工件的翻转和转移;
40.从而可实现对环腰工件进行多点吸附搬运翻转同时,调节多个吸盘间距使其适配不同形状大小工件提高吸附强度,并且可对于由于静电作用下粘连吸附的工件进行自动分离。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
