影像解码方法、影像编码方法及比特流的生成方法
1.本技术是申请日为2018年1月16日、申请号为201880007610.0、题为“影像编码方法/装置、影像解码方法/装置以及保存有比特流的记录介质”的专利申请的分案申请。
技术领域
2.本发明涉及一种影像编码/解码方法及装置。具体来讲,涉及一种能够利用任意影像区域的像素范围提升压缩效率的影像编码/解码方法及装置。
背景技术:
3.近年来,互联网中对如视频等多媒体数据的需求正在急剧增加。但是,目前信道(channel)带宽(bandwidth)的发展速度却难以充分满足急剧增加的多媒体数据量。作为上述趋势的一环,国际标准化机构即国际电联电信标准化部门(itu-t)的视频编码专家组(vceg,video coding expert group)和国际标准化组织/国际电工委员会(iso/iec)的动态图像专家组(mpeg,moving picture expert group)正在通过坚持不懈的合作研究而致力于开发出更加高效的视频压缩标准。
技术实现要素:
4.技术问题
5.本发明的目的在于,提供一种能够在影像的编码/解码过程中提升压缩效率的影像编码/解码方法及装置。
6.此外,本发明的目的在于,提供一种能够在影像的编码/解码过程中利用任意影像区域的像素范围提升压缩效率的影像编码/解码方法及装置。
7.此外,本发明的目的在于,提供一种能够对通过适用本发明的影像编码方法/装置生成的比特流进行保存的计算机可读取的记录介质。
8.技术方案
9.适用本发明的影像解码方法,能够包括:对与当前区块的限幅范围相关的信息进行解码的步骤;以及,以上述与限幅范围相关的信息为基础执行样本自适应偏移(sample adaptive offset,sao)滤波的步骤;其中,上述与限幅范围相关的信息能够包括当前区块中所包含的像素值的最大值以及最小值信息。
10.在适用本发明的影像解码方法中,上述与当前区块的限幅范围相关的信息,能够以上述当前区块或包含上述当前区块的任意区域单位进行传送。
11.在适用本发明的影像解码方法中,上述任意区域单位,能够包括图像单位、并行区块单位以及条带单位中的至少一个。
12.在适用本发明的影像解码方法中,上述最大值以及最小值信息,能够包括上述最大值以及最小值中的一个信息和上述最大值与最小值之间的差异信息。
13.在适用本发明的影像解码方法中,当上述当前区块的样本自适应偏移(sao)模式为带状偏移(band offset,bo)模式时,还能够包括:对与适用上述带状偏移的带状区域区
间的初始位置相关的初始带状区域位置进行解码的步骤;以及,对适用上述带状偏移的带状区域区间的m个偏移信息进行解码的步骤;其中,上述m能够是以上述已解码的初始带状区域位置和上述最小值以及上述最大值中的至少一个为基础决定。
14.在适用本发明的影像解码方法中,当上述当前区块的样本自适应偏移(sao)模式为带状偏移模式时,还能够包括:将上述最大值与上述最小值之间的区间再划分为32个带状区域的步骤;其中,与适用带状偏移的带状区域区间的初始位置相关的初始带状区域位置能够是上述再划分的32个带状区域的位置。
15.适用本发明的影像编码方法,能够包括:决定当前区块的限幅范围的步骤;以上述限幅范围为基础执行样本自适应偏移(sample adaptive offset,sao)滤波的步骤;以及,对上述与限幅范围相关的信息进行编码的步骤;其中,上述与限幅范围相关的信息能够包括当前区块中所包含的像素值的最大值以及最小值信息。
16.在适用本发明的影像编码方法中,上述与当前区块的限幅范围相关的信息,能够以上述当前区块或包含上述当前区块的任意区域单位进行编码。
17.在适用本发明的影像编码方法中,上述任意区域单位,能够包括图像单位、并行区块单位以及条带单位中的至少一个。
18.在适用本发明的影像编码方法中,上述最大值以及最小值信息,能够包括上述最大值以及最小值中的一个信息和上述最大值与最小值之间的差异信息。
19.在适用本发明的影像编码方法中,当上述当前区块的样本自适应偏移(sao)模式为带状偏移(band offset,bo)模式时,还能够包括:决定与适用上述带状偏移的带状区域区间的初始位置相关的初始带状区域位置的步骤;决定适用上述带状偏移的带状区域区间的m个偏移信息的步骤;以及,对上述初始带状区域位置以及上述m个偏移信息进行编码的步骤;其中,上述m能够是以上述初始带状区域位置和上述最小值以及上述最大值中的至少一个为基础决定。
20.在适用本发明的影像编码方法中,当上述当前区块的样本自适应偏移(sao)模式为带状偏移模式时,还能够包括:将上述最大值与上述最小值之间的区间再划分为32个带状区域的步骤;其中,与适用带状偏移的带状区域区间的初始位置相关的初始带状区域位置能够是上述再划分的32个带状区域的位置。
21.适用本发明的影像解码装置,能够包括:解码部,对与当前区块的限幅范围相关的信息进行解码;以及,滤波部,以上述与限幅范围相关的信息为基础执行样本自适应偏移(sample adaptive offset,sao)滤波;其中,上述与限幅范围相关的信息能够包括当前区块中所包含的像素值的最大值以及最小值信息。
22.适用本发明的影像编码装置,能够包括:编码部,决定当前区块的限幅范围并对上述限幅范围信息进行编码;以及,滤波部,以上述限幅范围为基础执行样本自适应偏移(sample adaptive offset,sao)滤波;其中,上述与限幅范围相关的信息能够包括当前区块中所包含的像素值的最大值以及最小值信息。
23.适用本发明的影像解码方法,能够包括:对当前区块的限幅带状区域索引信息进行解码的步骤;以及,以上述限幅带状区域索引信息为基础执行样本自适应偏移(sample adaptive offset,sao)滤波的步骤;其中,上述限幅带状区域索引信息能够是指示包括上述当前区块中所包含的像素值的最大值以及最小值的限幅带状区域的信息。
24.在适用本发明的影像解码方法中,上述当前区块的限幅带状区域索引信息,能够以上述当前区块或包含上述当前区块的任意区域单位进行传送。
25.在适用本发明的影像解码方法中,上述任意区域单位,能够包括图像单位、并行区块单位以及条带单位中的至少一个。
26.在适用本发明的影像解码方法中,上述限幅带状区域,能够包括通过将最大像素值至最小像素值的范围分割成n个区间而获得的n个区间,上述限幅带状区域索引信息,能够是指示上述n个区间中的某一个区间的信息。
27.在适用本发明的影像解码方法中,当上述当前区块所包含的像素的最大值以及最小值包含于相同的带状区域时,上述限幅带状区域索引信息能够是指示上述相同的带状区域的信息。
28.在适用本发明的影像解码方法中,当上述当前区块所包含的像素的最大值以及最小值没有包含于相同的带状区域时,上述限幅带状区域索引信息能够包括指示包含上述最大值的带状区域的信息以及指示上述最小值的信息。
29.适用本发明的影像编码方法,能够包括:决定当前区块的限幅范围的步骤;以上述限幅范围为基础决定上述当前区块的限幅带状区域的步骤;以上述限幅带状区域为基础执行样本自适应偏移(sample adaptive offset,sao)滤波的步骤;以及,对限幅带状区域索引信息进行编码的步骤;其中,上述限幅带状区域索引信息能够是指示包括上述当前区块所包含的像素值的最大值以及最小值的限幅带状区域的信息。
30.在适用本发明的影像编码方法中,上述当前区块的限幅带状区域索引信息,能够以上述当前区块或包含上述当前区块的任意区域单位进行编码。
31.在适用本发明的影像编码方法中,上述任意区域单位,能够包括图像单位、并行区块单位以及条带单位中的至少一个。
32.在适用本发明的影像编码方法中,上述限幅带状区域,能够包括通过将最大像素值至最小像素值的范围分割成n个区间而获得的n个区间,上述限幅带状区域索引信息,能够是指示上述n个区间中的某一个区间的信息。
33.在适用本发明的影像编码方法中,当上述当前区块所包含的像素的最大值以及最小值包含于相同的带状区域时,上述限幅带状区域索引信息能够是指示上述相同的带状区域的信息。
34.在适用本发明的影像编码方法中,当上述当前区块所包含的像素的最大值以及最小值没有包含于相同的带状区域时,上述限幅带状区域索引信息能够包括指示包含上述最大值的带状区域的信息以及指示上述最小值的信息。
35.适用本发明的影像解码装置,能够包括:解码部,对当前区块的限幅带状区域索引信息进行解码;以及,滤波部,以上述限幅带状区域索引信息为基础执行样本自适应偏移(sample adaptive offset,sao)滤波;其中,上述限幅带状区域索引信息能够是指示包括上述当前区块中所包含的像素值的最大值以及最小值的限幅带状区域的信息。
36.适用本发明的影像编码装置,能够包括:编码部,决定当前区块的限幅范围,以上述限幅范围为基础决定上述当前区块的限幅带状区域,对限幅带状区域索引信息进行编码;以及,滤波部,以上述限幅带状区域为基础执行样本自适应偏移(sample adaptive offset,sao)滤波;其中,上述限幅带状区域索引信息能够是指示包括上述当前区块所包含
的像素值的最大值以及最小值的限幅带状区域的信息。
37.适用本发明的计算机可读取的记录介质,能够对通过适用本发明的影像编码方法或影像编码装置生成的比特流进行保存。
38.有益效果
39.通过本发明,可以提供能够提升压缩效率的影像编码/解码方法及装置。
40.此外,通过本发明,可以提供能够利用任意影像区域的像素范围提升压缩效率的影像编码/解码方法及装置。
41.此外,通过本发明,可以提供一种能够对通过适用本发明的影像编码方法或影像编码装置生成的比特流进行保存的计算机可读取的记录介质。
附图说明
42.图1是对适用本发明之一实施例的影像编码装置进行图示的示意图。
43.图2是对适用本发明之一实施例的影像解码装置进行图示的示意图。
44.图3是用于对边缘偏移(eo,edge offset)模式进行说明的示意图。
45.图4是用于对带状偏移(bo,band offset)模式进行说明的示意图。
46.图5是用于对在影像编码装置100中执行样本自适应偏移(sao)信息的编码的方法进行说明的示意图。
47.图6是用于对在影像解码装置200中执行样本自适应偏移(sao)信息的解码的方法进行说明的示意图。
48.图7是用于对任意区域内的限幅范围以及带状偏移(bo)模式的可用带状区域进行说明的示意图。
49.图8是对将带状偏移(bo)模式的可用带状区域区间再细分成32个带状区域区间的状态进行图示的示意图。
50.图9是用于对利用任意区域单位的限幅范围执行残差区块系数的补正的方法进行说明的示意图。
51.图10是用于对以图像单位执行限幅信息的编码的方法进行说明的示意图。
52.图11是用于对以图像单位执行限幅信息的解码的方法进行说明的示意图。
53.图12是用于对以任意区块单位执行限幅信息的编码的方法进行说明的示意图。
54.图13是用于对以任意区块单位执行限幅信息的解码的方法进行说明的示意图。
55.图14是用于对适用本发明之一实施例的以限幅范围为基础执行样本自适应偏移(sao)信息的编码的方法进行说明的顺序图。
56.图15是用于对适用本发明之实施例的以限幅范围为基础执行样本自适应偏移(sao)信息的解码的方法进行说明的顺序图。
57.图16是用于对适用本发明的限幅带状区域决定方法进行说明的示意图。
58.图17是用于对以图像单位执行限幅信息的编码的方法进行说明的示意图。
59.图18是用于对以图像单位执行限幅信息的解码的方法进行说明的示意图。
60.图19是用于对以任意区块单位执行限幅信息的编码的方法进行说明的示意图。
61.图20是用于对以任意区块单位执行限幅信息的解码的方法进行说明的示意图。
62.图21是用于对在影像编码装置100以及影像解码装置200中的适用本发明的限幅
适用位置进行说明的示意图。
63.图22是用于对在边缘偏移(eo)模式中考虑到限幅范围的情况下决定不同范畴的偏移值的方法进行说明的示意图。
64.图23是用于对在带状偏移(bo)模式中决定各个带状区域的偏移值时,在考虑到限幅范围的情况下决定偏移的方法进行说明的示意图。
65.图24是用于对执行样本自适应偏移(sao)信息的编码的方法进行说明的示意图。
66.图25是用于对执行样本自适应偏移(sao)信息的解码的方法进行说明的示意图。
67.图26是用于对适用本发明之又一实施例的以限幅范围为基础执行解码器侧运动向量推导(dmvd,decoder-side motion vector derivation)的过程进行说明的示意图。
68.图27是用于对适用本发明之又一实施例的以限幅范围为基础执行去块滤波的过程进行说明的顺序图。
具体实施方式
69.本发明能够进行各种变更并具有多种不同的实施例,接下来将在附图中对特定的实施例进行图示并进行详细的说明。但是,下述内容并不是为了将本发明限定于特定的实施形态,而是应该理解为包括本发明的思想以及技术范围内的所有变更、均等物乃至替代物。在对各个附图进行说明的过程中,对于类似的构成要素使用了类似的参考符号。
70.在对不同的构成要素进行说明的过程中能够使用如第1、第2等术语,但是上述构成要素并不因为上述术语而受到限定。上述术语只是用于对一个构成元素与其他构成元素进行区别。例如,在不脱离本发明的权利要求范围的前提下,第1构成元素也能够被命名为第2构成元素,同理,第2构成元素也能够被命名为第1构成元素。术语“和/或”包括多个相关记载项目的组合或多个相关记载项目中的某一个项目。
71.当记载为某个构成要素与其他构成要素“连接”或“接触”时,应理解为不仅能够与上述其他构成要素直接连接或接触,还能够在两者之间有其他构成要素存在。与此相反,当记载为某个构成元素与其他构成元素“直接连接”或“直接接触”时,应理解为在两者之间没有其他构成元素存在。
72.在本技术中所使用的术语只是为了对特定的实施例进行说明,并不是为了对本发明进行限定。除非上下文中有明确的相反含义,否则单数型语句还包含复数型含义。在本技术中,“包括”或“具有”等术语只是为了表明说明书中所记载的特征、数字、步骤、动作、构成元素、部件或上述之组合存在,并不应该理解为事先排除一个或多个其他特征、数字、步骤、动作、构成元素、部件或上述之组合存在或被附加的可能性。
73.接下来,将结合附图对适用本发明的实施例进行详细的说明。在下述内容中,对于附图中相同的构成要素将使用相同的参考符号且对相同构成要素的重复说明将被省略。
74.图1是对适用本发明之一实施例的影像编码装置进行图示的示意图。
75.参阅图1,影像编码装置100能够包括影像分割部101、帧内预测部102、帧间预测部103、减法运算部104、变换部105、量化部106、熵编码部107、逆量化部108、逆变换部109、加法运算部110、滤波部111以及存储器112。
76.在图1中为了表示影像编码装置中不同的特殊功能而对各个构成部单独进行了图示,但这并不代表各个构成部由相互分离的硬件或一个软件单位构成。即,虽然为了说明的
便利而对各个构成部进行了罗列说明,但是既能够将各个构成部中的至少两个构成部合并成一个构成部,也能够将一个构成部分割成多个构成部并使其执行对应的功能,而如上所述的各个构成部被整合的实施例以及被分离的实施例在不脱离本发明之本质的前提下包含于本发明的权利要求范围之内。
77.此外,一部分构成要素可能并不是在本发明中执行本质功能所必要的构成要素,而只是用于提升性能的可选构成要素。本发明能够仅包括除只是用于提升性能的构成元素之外的实现本发明之本质所必要的构成部,而仅包括除只是用于提升性能的可选构成元素之外的必要构成元素的结构同样包含于本发明的权利要求范围之内。
78.影像分割部100能够将输入影像分割成至少一个区块。此时,输入影像能够是如图像、条带、并行区块或片段等多种不同的形态和大小。区块能够是指编码单位(cu)、预测单位(pu)或变换单位(tu)。上述分割能够基于四叉树(quad tree)或二叉树(biniary tree)中的至少一种执行。四叉树是将上级区块分割成宽度和高度均为上级区块的一半的四个下级区块的方式。二叉树是将上级区块分割成宽度或高度中的某一个为上级区块的一半的两个下级区块的方式。通过基于上述二叉树的分割,不仅能够将区块分割成正方形,还能够分割成非正方形形态。
79.接下来,在适用本发明的实施例中,编码单位不仅能够作为编码执行单位的含义使用,也能够作为解码执行单位的含义使用。
80.预测部102、103能够包括用于执行帧间预测的画面间预测部103以及用于执行帧内预测的画面内预测部102。能够在决定对预测单位执行帧间预测还是帧内预测之后,再根据不同的预测方法决定具体信息(例如帧内预测模式、运动向量、参考图像等)。此时,执行预测的处理单位与决定预测方法以及具体内容的处理单位能够不同。例如,预测方法以及预测模式等能够以预测单位进行确定,而预测执行能够以变换单位执行。
81.所生成的预测区块与原始区块之间的残差值(残差区块)能够被输入到变换部105。此外,执行预测时使用的如预测模式信息、运动向量信息等能够在与残差值一起被熵编码部107编码之后传送到解码器。在使用特定编码模式的情况下,也能够不通过预测部102、103生成预测区块,而是在直接对原始区块进行编码之后传送到解码部。
82.画面内预测部102能够以当前图像内的像素信息即当前区块周边的参考像素信息为基础生成预测区块。当需要执行帧内预测的当前区块的周边区块的预测模式为帧间预测时,能够将包含于已适用帧间预测的周边区块中的参考像素替代成已适用帧内预测的周边其他区块内的参考像素。即,在参考像素不可用的情况下,能够在将不可用参考像素信息替代成可用的参考像素中的至少一个参考像素之后使用。
83.在帧内预测中,预测模式能够包括根据预测方向使用参考像素信息的定向预测模式以及在执行预测时不使用方向信息的非定向模式。用于预测亮度信息的模式与用于预测色差信息的模式能够不同,在对色差信息进行预测时能够使用在预测亮度信息的过程中使用的帧内预测模式信息或所预测到的亮度信号信息。
84.画面内预测部102能够包括自适应帧内平滑(ais,adaptive intra smoothing)滤波器、参考像素插值部以及均值(dc)滤波器。自适应帧内平滑(ais)滤波器是用于对当前区块的参考像素执行滤波的滤波器,能够根据当前预测单位的预测模式自适应地决定滤波器的适用与否。在当前区块的预测模式为不执行自适应帧内平滑(ais)滤波的模式时,能够不
适用自适应帧内平滑(ais)滤波器。
85.当预测单位的帧内预测模式为以对参考像素进行插值的像素值为基础执行帧内预测的预测单位时,画面内预测部102的参考像素插值部能够通过对参考像素进行插值而生成分数单位位置的参考像素。在当前预测单位的预测模式为不对参考像素进行插值而生成预测区块的预测模式时,能够不对参考像素进行插值。在当前区块的预测模式为均值(dc)模式时,均值(dc)滤波器能够通过滤波生成预测区块。
86.进而,能够生成包含在预测部102、103中生成的预测单位与预测单位的原始区块之间的差异值即残差值(residual)信息的残差区块。所生成的残差区块能够被输入到变换部130中进行变换。
87.画面间预测部103能够以当前图像的前一个图像或后一个图像中的至少一个图像的信息为基础对预测单位进行预测,而在一部分情况下也能够以当前图像内已完成编码的一部分区域的信息为基础对预测单位进行预测。画面间预测部103能够包括参考图像插值部、运动预测部以及运动补偿部。
88.在参考图像插值部,能够从内存112接收参考图像信息并在参考图像中生成整数像素以下的像素信息。对于亮度像素,为了以1/4像素单位生成整数像素以下的像素信息,能够使用滤波系数不同的基于离散余弦变换(dct)的8抽头插值滤波器(dct-based interpolation filter)。对于色差信号,为了以1/8像素单位生成整数像素以下的像素信息,能够使用滤波系数不同的基于离散余弦变换(dct)的4抽头插值滤波器(dct-based interpolation filter)。
89.运动预测部能够以通过参考图像插值部进行插值的参考图像为基础执行运动预测。作为计算出运动向量的方法,能够使用如全搜索区块匹配算法(fbma,full search-based block matching algorithm)、三步搜索算法(tss,three step search)、新三步搜索算法(nts,new three-step search algorithm)等多种不同的方法。运动向量能够以已插值的像素为基础使用1/2或1/4像素单位的运动向量值。在运动预测部中能够通过不同的运动预测方法对当前预测单位进行预测。作为运动预测方法,能够使用如跳过(skip)法、合并(merge)法、高级运动向量预测(amvp,advanced motion vector prediction)法等多种方法。减法运算部104通过对当前需要进行编码的区块与在画面内预测部102或画面间预测部103中生成的预测区块进行减法运算而生成当前区块的残差区块。
90.在变换部105中,能够通过对原始区块与预测区块之间的差异即残差区块进行变换而生成变换区块。变换区块能够是执行变换以及量化过程的最小的单位。变换部105能够通过将残差信号变换成频率区域而生成包含变换系数的变换区块。为了将包含残差数据的残差区块变换成频率区域,能够使用如离散余弦变换(dct,discrete cosine transform)、离散正弦变换(dst,discrete sine transform)、卡洛南-洛伊变换(klt,karhunen loeve transform)等变换方法。通过利用如上所述的变换方法将残差信号变换成频率区域,能够生成变换系数。为了便于变换的执行,能够执行利用基向量(basis vector)的矩阵运算。根据对预测区块进行编码时的预测模式,能够在矩阵运算时混合使用多种不同的变换方法。例如,能够基于在生成残差区块时所使用的预测单位的帧内预测模式决定变换方法。例如,能够根据帧内预测模式在水平方向上使用离散余弦变换(dct)而在垂直方向上使用离散正弦变换(dst)。
91.量化部106能够对在变换部105中变换成频率区域的值进行量化。即,量化部106能够对从变换部105生成的变换区块的变换系数进行量化而生成具有已量化的变换系数的已量化的变换区块(quantized transform coefficient)。作为量化方法,能够使用如死区均匀阈值量化(dzutq:dead zone uniform threshold quantization)或量化加权矩阵(quantization weighted matrix)等。或者,也能够利用如对其进行改良的量化等多种量化方法。量化系数能够根据区块或影像的重要程度而发生变化。在量化部106中计算出的值能够被提供到逆量化部108以及熵编码部107。
92.上述变换部105和/或量化部106能够被选择性地包含到影像编码装置100中。即,影像编码装置100能够对残差区块的残差数据执行变换或量化中的至少一种,也能够同时跳过变换以及量化而对残差区块进行编码。即使是在影像编码装置100没有执行变换或量化中的某一种或变换以及量化均没有被执行的情况下,被输入到熵编码部107中的区块通常都会被称之为变换区块。
93.熵编码部107对输入数据进行熵编码。熵编码部107能够对已量化的变换区块进行编码并输出比特流。即,熵编码部107能够通过如熵编码(entropy encoding)等多种不同的编码技法对从量化部106输出的已量化的变换区块的已量化的变换系数进行编码。此外,熵编码部107还能够对在后续说明的影像解码装置中对相应的区块进行解码时所需要的附加信息(例如,预测模式信息以及量化系数等)进行编码。在执行熵编码时,能够使用如指数哥伦布码(exponential golomb)、基于上下文自适应的可变长编码(cavlc,context-adaptive variable length coding)以及基于上下文自适应的二进制算术编码(cabac,context-adaptive binary arithmetic coding)等多种不同的编码方法。
94.熵编码部107能够对来自预测部102、103的如编码单位的残差值系数信息以及区块类型信息、预测模式信息、分割单位信息、预测单位信息以及传送单位信息、运动向量信息、参考帧信息、区块的插值信息、滤波信息等多种不同的信息进行编码。在熵编码部107中,变换区块的系数能够以变换区块内的部分区块单位对基于用于指示非0的系数、绝对值大于1或2的系数以及系数的符号等的多种类型的标志进行编码。对于无法仅基于上述标志进行编码的系数,能够基于通过标志进行编码的系数与实际变换区块的系数之间的差异的绝对值进行编码。在逆量化部108以及逆变换部109中,对在量化部106中量化的值进行逆量化并对在变换部105中变换的值进行逆变换。能够通过将在逆量化部108以及逆变换部109中生成的残差值(residual)与通过预测部102、103中包含的运动推测部、运动补偿部以及画面内预测部102预测出的预测单位进行合并而生成重建区块(reconstructed block)。加法运算部110能够通过对在预测部102、103中生成的预测区块与通过逆变换部109生成的残差区块进行加法运算而生成重建区块。
95.滤波部111能够包括去块滤波器、偏移补正部、自适应环路滤波器(alf,adaptive loop filter)中的至少一个。
96.去块滤波器能够消除在已重建的图像中因为区块之间的边界而出现的区块失真。为了判断是否需要执行去块,能够以包含于区块内的若干个列或行中所包含的像素为基础判断是否需要对当前区块适用去块滤波器。在对区块适用去块滤波器时,能够根据所需要的去块滤波强度适用强滤波器(strong filter)或弱滤波器(weak filter)。此外,在适用去块滤波器的过程中,能够在执行垂直滤波以及水平滤波的同时并行执行水平方向滤波以
及垂直方向滤波。
97.偏移补正部能够对已执行去块的影像以像素单位执行与原始影像之间的偏移补正。为了对特定图像执行偏移补正,能够使用在将影像中所包含的像素划分成一定数量的区域之后决定需要执行偏移的区域并对相应的区域适用偏移的方法(带状偏移模式,bo模式)或在考虑各个像素的边缘信息的情况下适用偏移的方法(边缘偏移模式,eo模式)。
98.自适应环路滤波(alf,adaptive loop filtering)能够以对已滤波的重建影像与原始影像进行比较的值为基础执行。能够在将影像中所包含的像素划分成特定的组之后决定需要适用于相应组中的一种滤波器,然后对不同的组分别执行不同的滤波。对于与自适应环路滤波器(alf)的适用与否相关的信息,亮度信号能够按照各个编码单位(coding unit,cu)进行传送,而且根据各个区块,所适用的自适应环路滤波器(alf)的形状以及滤波系数能够不同。此外,还能够适用相同形态(固定形态)的自适应环路滤波(alf)滤波器而不考虑适用对象区块的特性。
99.存储器112能够对通过滤波部111计算出的重建区块或图像进行保存,所保存的重建区块或图像能够在执行帧间预测时提供到预测部102、103。
100.上述画面内预测部102以及画面间预测部103能够被统称为预测部。预测部能够利用当前区块的周边像素或之前已经完成解码的参考图像生成预测区块。作为预测区块,能够在当前区块内生成1个或多个预测区块。在当前区块内的预测区块为1个时,预测区块与当前区块能够具有相同的形态。在生成预测区块之后,能够生成对应于当前区块与预测区块之间的差分的残差区块。通过对所生成的残差区块适用如率失真优化(rdo:rate-distortion optimization)等多种不同的技法,能够决定最佳的预测模式。例如,在进行率失真优化(rdo)计算时能够使用如下所示的公式1。
101.[公式1]
[0102][0103]
在上述公式1中,d()、r()以及j()分别代表量化所导致的失真、压缩数据流的码率以及率失真(rd)代价。代表编码模式。x代表拉格朗日乘数(lagranginan multiplier),作为用于对误差量与比特量之间的单位进行匹配的比例校正系数使用。为了在编码过程中被选择为最佳的编码模式,在适用相模式时的j()即率失真(rd)代价应小于适用其他模式时的结果。在对率失真(rd)代价进行计算时,能够同时考虑比特率以及误差。
[0104]
图2是对适用本发明之一实施例的影像解码装置进行图示的示意图。
[0105]
参阅图2,影像解码装置200能够包括熵解码部201、逆量化部202、逆变换部203、加法运算部204、滤波部205、存储器206以及预测部207、208。
[0106]
当通过影像编码装置100生成的影像比特流被输入到影像解码装置200时,能够按照与影像编码装置100执行的过程相反的过程对所输入的比特流进行解码。
[0107]
熵解码部201能够按照与影像编码装置100的熵编码部107执行的熵编码相反的步骤进行熵解码。例如,能够对应于在影像编码器中执行的方法,适用如指数哥伦布码(exponential golomb)、基于上下文自适应的可变长编码(cavlc,context-adaptive variable length coding)以及基于上下文自适应的二进制算术编码(cabac,context-adaptive binary arithmetic coding)等多种不同的方法。在熵解码部201中,变换区块的系数能够以变换区块内的部分区块单位基于用于指示非0的系数、绝对值大于1或2的系数
以及系数的符号等的多种类型的标志进行解码。对于无法仅基于上述标志表现的系数,能够基于通过标志表现的系数以及所信令的系数的和进行解码。
[0108]
在熵解码部201中,能够对与在编码器中执行的帧内预测以及帧间预测相关的信息进行解码。
[0109]
逆量化部202通过对已量化的变换区块执行逆量化而生成变换区块。按照与图1中的逆量化部108实质相同的方式工作。
[0110]
逆变换部203通过对变换区块执行逆变换而生成残差区块。此时,能够基于与预测方法(帧间或帧内预测)、区块的大小和/或形态以及帧内预测模式等相关的信息决定变换方法。按照与图1中的逆变换部109实质相同的方式工作。
[0111]
加法运算部204通过对在画面内预测部207或画面间预测部208中生成的预测区块与通过逆变换部203生成的残差区块进行加法运算而生成重建区块。按照与图1中的加法运算部110实质相同的方式工作。
[0112]
滤波部205用于减少在已重建的区块中出现的多种类型的噪声。
[0113]
滤波部205能够包括去块滤波器、偏移补正部以及自适应环路滤波器(alf)。
[0114]
从影像编码装置100,能够接收到与是否对相应区块或图像适用去块滤波器相关的信息以及与在适用去块滤波器的情况下适用了强滤波还是弱滤波相关的信息。影像解码装置200的去块滤波器能够在接收到从影像编码装置100提供的去块滤波器相关信息之后在影像解码装置200中对相应区块执行去块滤波。
[0115]
偏移补正部能够以在进行编码时适用于影像的偏移补正类型以及偏移值信息等为基础对已重建的影像执行偏移补正。
[0116]
自适应环路滤波器(alf)能够以从影像编码装置100提供的自适应环路滤波器(alf)适用与否信息、自适应环路滤波器(alf)系数信息等为基础适用到编码单位。如上所述的自适应环路滤波器(alf)信息能够被包含到特定的参数集中提供。滤波部205按照与图1中的滤波部111实质相同的方式工作。
[0117]
存储器206对通过加法运算部204生成的重建区块进行保存。按照与图1中的存储器112实质相同的方式工作。
[0118]
预测部207、208能够以从熵解码部201提供的预测区块生成相关信息以及从存储器206提供的之前已解码的区块或图像信息为基础生成预测区块。
[0119]
预测部207、208能够包括画面内预测部207以及画面间预测部208。虽然没有单独进行图示,但是预测部207、208还能够包括预测单位判定部。预测单位判定部能够接收从熵解码部201输入的预测单位信息、帧内预测方法的预测模式信息、帧间预测方法的运动预测相关信息等多种不同的信息并从当前解码单位区分预测单位,从而判定预测单位执行帧间预测还是执行帧内预测。画面间预测部208能够利用从影像编码装置100提供的当前预测单位的帧间预测所需要的信息,以包含当前预测单位的当前图像的上一个图像或下一个图像中的至少一个图像中所包含的信息为基础对当前预测单位执行帧间预测。或者,也能够在包含当前预测单位的当前图像内,以已重建的一部分区域的信息为基础执行帧间预测。
[0120]
为了执行画面间预测,能够以编码单位作为基准判断包含于相应编码单位中的预测单位的运动预测方法是跳过模式(skip mode)、合并模式(merge mode)、高级运动向量预测模式(amvp mode)中的哪一种方法。
[0121]
画面内预测部207利用位于当期需要进行编码的区块周边的已重建的像素生成预测区块。
[0122]
画面内预测部207能够包括自适应帧内平滑(ais,adaptive intra smoothing)滤波器、参考像素插值部以及均值(dc)滤波器。自适应帧内平滑(ais)滤波器是用于对当前区块的参考像素执行滤波的滤波器,能够根据当前预测单位的预测模式自适应地决定滤波器的适用与否。能够利用从影像编码装置100提供的预测单位的预测模式以及自适应帧内平滑(ais)滤波器信息对当前区块的参考像素执行自适应帧内平滑(ais)滤波。在当前区块的预测模式为不执行自适应帧内平滑(ais)滤波的模式时,能够不适用自适应帧内平滑(ais)滤波器。
[0123]
当预测单位的预测模式为基于对参考像素进行插值的像素值执行帧内预测的预测单位时,画面内预测部207的参考像素插值部能够通过对参考像素进行插值而生成分数单位位置的参考像素。所生成的分数单位位置上的参考像素能够作为当前区块内的像素的预测像素使用。在当前预测单位的预测模式为不对参考像素进行插值而生成预测区块的预测模式时,能够不对参考像素进行插值。在当前区块的预测模式为均值(dc)模式时,均值(dc)滤波器能够通过滤波生成预测区块。
[0124]
画面内预测部207按照与图1中的画面内预测部102实质相同的方式工作。
[0125]
画面间预测部208利用保存在存储器206中的参考图像以及运动信息生成帧间预测区块。画面间预测部208按照与图1中的画面间预测部103实质相同的方式工作。
[0126]
接下来,将参阅图3以及图4对样本自适应偏移(sample adaptive offset,sao)补偿滤波进行说明。
[0127]
图3是用于对边缘偏移(eo)模式进行说明的示意图。
[0128]
如图3中的上端框301所图示,以当前像素为中心的相邻像素之间的边界方向能够分为0、45、90、135等4种方向信息中的某一种。此外,以当前像素与相邻像素之间的像素值的差异为基础,如图3中的下端框302所图示,能够分为4种范畴(类别)中的某一种。图3中的下端框302的各个范畴的像素索引x-1是指上端框301的各个方向的周边像素1。同理,像素索引x是指当前像素,像素索引x 1是指周边像素2。在不同的范畴上,需要适用于当前像素的偏移的符号已经决定。例如,范畴1与范畴2的偏移的符号为正( ),范畴3与范畴4的偏移的符号为负(-)。
[0129]
对于不同当前像素的4种方向信息中的最佳方向,能够在根据与周边像素的像素值之间的差异从4种范畴中找出对应的形态之后通过在相应的范畴内加上偏移值而执行滤波。此外,如果与当前像素和周边像素之间的像素值的差异对应的形态不属于如图3所图示的范畴内,则对于相应的当前像素能够不执行滤波。
[0130]
图4是用于对带状偏移(bo)模式进行说明的示意图。
[0131]
带状偏移(bo)模式能够将基于输入影像的比特深度的像素范围(例如8位影像的像素范围为0~255)划分成32个带状区域并决定作为带状偏移对象的4个连续的带状区域。如果当前像素值属于4个连续的带状区域,能够通过将相应带状区域的偏移值加到当前像素值而执行滤波。
[0132]
在图4所图示的实例中,在将基于输入影像的比特深度的像素范围划分成32个带状区域之后决定将10~13号带状区域作为带状偏移对象。如果当前像素的像素值属于10~
13个带状区域中的某一个,能够通过将相应带状区域的偏移值加到当前像素的像素值而执行滤波。
[0133]
图5是用于对在影像编码装置100中执行样本自适应偏移(sao)信息的编码的方法进行说明的示意图。
[0134]
在步骤s501,能够以执行样本自适应偏移(sao)的编码区块(当前区块)为基准,对用于指示是否直接使用左侧编码区块和/或上端编码区块的样本自适应偏移(sao)信息的信息(样本自适应偏移(sao)合并信息)进行编码。首先,对样本自适应偏移合并(sao merge)_左侧信息进行编码,当相应信息为真时,不对样本自适应偏移合并(sao merge)_上端信息进行编码并跳转到步骤s502。当样本自适应偏移合并(sao merge)_左侧信息为假时,对样本自适应偏移合并(sao merge)_上端信息进行编码并跳转到步骤s502。
[0135]
在步骤s502,判断样本自适应偏移合并(sao merge)_左侧信息以及样本自适应偏移合并(sao merge)_上端信息是否均为假。当两个信息均为假时跳转到步骤s503,如果任何一个为真则结束步骤。
[0136]
在步骤s503,将cidx信息设置为初始值0。当cidx为0时代表亮度(luma)成分,当cidx为1时代表色差(chroma)cb成分,当cidx为2时代表色差cr成分。首先,在步骤s503,判断cidx是否为0,当为0时跳转到步骤s504,当不为0时跳转到步骤s505。
[0137]
在步骤s504,对亮度成分的样本自适应偏移(sao)模式信息进行编码。样本自适应偏移(sao)模式信息能够代表用于指示对当前区块执行边缘偏移(eo)模式、带状偏移(bo)模式以及样本自适应偏移(sao)非动作模式中的哪一种模式的信息。
[0138]
在步骤s505,判断cidx是否为1,当为1时跳转到步骤s506,当不为1时结束步骤。
[0139]
在步骤s506,对色差成分的样本自适应偏移(sao)模式信息进行编码。样本自适应偏移(sao)模式信息能够代表用于指示对当前区块执行边缘偏移(eo)模式、带状偏移(bo)模式以及样本自适应偏移(sao)非动作模式中的哪一种模式的信息。其中,色差成分的cb、cr成分能够共享相同的样本自适应偏移(sao)模式信息。
[0140]
在步骤s507,当当前区块的样本自适应偏移(sao)模式为样本自适应偏移(sao)非动作模式时跳转到步骤s516,而当当前区块的样本自适应偏移(sao)模式为带状偏移(bo)模式或边缘偏移(eo)模式时跳转到步骤s508。
[0141]
在步骤s508,对4个偏移绝对值信息进行编码。在边缘偏移(eo)模式,4个偏移代表不同范畴的偏移,在边缘偏移(eo)模式,4个偏移代表连续的4个不同带状区域的偏移。
[0142]
在步骤s509,判断当前区块的样本自适应偏移(sao)模式是否为带状偏移(bo)模式,当为带状偏移(bo)模式时跳转到步骤s510,当不为带状偏移(bo)模式时跳转到步骤s512。
[0143]
在步骤s510,对带状偏移(bo)模式的4个偏移的符号信息进行编码。
[0144]
在步骤s511,对用于指示带状偏移(bo)模式的连续的4个带状区域区间是从哪一个带状区域区间开始的初始带状区域位置进行编码。
[0145]
在步骤s512,判断cidx是否为0,当为0时跳转到步骤s513,当不为0时跳转到步骤s514。
[0146]
在步骤s513,对亮度成分的边缘偏移(eo)模式的方向信息进行编码。
[0147]
在步骤s514,判断cidx是否为1,当cidx不为1时结束步骤,当为1时跳转到步骤
s515。
[0148]
在步骤s515,对色差成分的边缘偏移(eo)模式的方向信息进行编码。其中,色差成分的cb、cr成分共享相同的方向信息。
[0149]
在步骤s516,将当前的cidx的值加1并跳转到步骤s503重复如上所述的过程。
[0150]
图6是用于对在影像解码装置200中执行样本自适应偏移(sao)信息的解码的方法进行说明的示意图。
[0151]
在步骤s601,对在图5中的步骤s501进行编码的样本自适应偏移合并(sao merge)信息进行解码。
[0152]
在步骤s602,判断样本自适应偏移合并(sao merge)_上端信息以及样本自适应偏移合并(sao merge)_左侧信息是否均为假。当两个信息均为假时跳转到步骤s603,如果任何一个为真则结束步骤。
[0153]
在步骤s603,将cidx值初始化为0,并判断相应的cidx值是否为0。当cidx值为0时跳转到步骤s604,当不为0时跳转到步骤s605。
[0154]
在步骤s604,对在图5中的步骤s504进行编码的亮度成分的样本自适应偏移(sao)模式信息进行解码。
[0155]
在步骤s605,判断cidx是否为1,当为1时跳转到步骤s606,当不为1时结束步骤。
[0156]
在步骤s606,对在图5中的步骤s506进行编码的色差成分的样本自适应偏移(sao)模式信息进行解码。其中,色差成分的cb、cr成分能够共享相同的样本自适应偏移(sao)模式信息。
[0157]
在步骤s607,当当前区块的样本自适应偏移(sao)模式为样本自适应偏移(sao)非动作模式时跳转到步骤s616,而当当前区块的样本自适应偏移(sao)模式为带状偏移(bo)模式或边缘偏移(eo)模式时跳转到步骤s608。
[0158]
在步骤s608,对在图5中的步骤s508进行编码的4个偏移绝对值信息进行解码。
[0159]
在步骤s609,判断当前区块的样本自适应偏移(sao)模式是否为带状偏移(bo)模式,当当前区块的样本自适应偏移(sao)模式为带状偏移(bo)模式时跳转到步骤s610,当不为带状偏移(bo)模式时跳转到步骤s612。
[0160]
在步骤s610,对在图5中的步骤s510进行编码的带状偏移(bo)模式的4个偏移的符号信息进行解码。
[0161]
在步骤s611,对在图5中的步骤s511进行编码的用于指示带状偏移(bo)模式的连续的4个带状区域区间是从哪一个带状区域区间开始的初始带状区域位置进行解码。
[0162]
在步骤s612,判断cidx是否为0,当cidx为0时跳转到步骤s613,当不为0时跳转到步骤s614。
[0163]
在步骤s613,对在图5中的步骤s513进行编码的亮度成分的边缘偏移(eo)模式的方向信息进行解码。
[0164]
在步骤s614,判断cidx是否为1,当cidx不为1时结束步骤,当为1时跳转到步骤s615。
[0165]
在步骤s615,对在图5中的步骤s515进行编码的色差成分的边缘偏移(eo)模式的方向信息进行解码。其中,色差成分的cb、cr成分能够共享相同的方向信息。
[0166]
在步骤s616,将当前的cidx的值加1并跳转到步骤s603重复如上所述的过程。
[0167]
在接下来的说明中,假定输入影像的比特深度为8位。
[0168]
图7是用于对任意区域内的限幅范围以及带状偏移(bo)模式的可用带状区域进行说明的示意图。
[0169]
通过在图像、并行区块、条带或区块单位等的任意的区域单位对原始像素的最大值以及最小值进行探索,能够决定限幅范围。限幅范围能够适用于样本自适应偏移(sao)的带状偏移(bo)模式的带状区域区间。
[0170]
在图7中,具有8位深度的输入影像的最小像素值位置为0,而最大像素值位置为255。在以任意的区域单位在相应区域内对原始像素值进行扫描之后,能够决定相应区域中所包含的像素值的最大值以及最小值。如图7中的(a)所图示,任意区域内的像素值的最大值为限幅最大值,而最小值为限幅最小值。
[0171]
上述限幅过程能够在影像编码装置100中,在经过预测部102、103之后、经过加法运算部110之后和/或经过滤波部111之后执行。在影像编码装置200中,在经过预测部207、208之后、经过加法运算部204之后和/或经过滤波部205之后执行上述限幅过程。
[0172]
在如上所述的样本自适应偏移(sao)带状偏移(bo)模式中,将整体像素区间(0~255)划分为32个带状区域,并使用需要适用滤波的4个带状区域的偏移信息。此时,如果限幅范围小于整体像素范围,则能够在仅考虑限幅范围内的带状区域的情况下执行滤波。
[0173]
图7中的(b)是将整体像素区间划分为32个带状区域的情况,经过明暗处理的带状区域是与当前区域的限幅范围对应的带状区域,代表能够适用带状偏移(bo)模式的带状区域区间。
[0174]
在图7的(b)中,因为属于第1~8号带状区域、第27~32号带状区域的当前区域的像素不存在,因此不需要将相应的带状区域作为样本自适应偏移(sao)带状偏移(bo)模式的带状区域考虑。此外,当限幅范围内的最大值与最小值相同时,能够不执行参阅图1以及图2进行说明的所有过程而利用上述相同值对影像进行重建。此外,当限幅范围内的最大值与最小值之间的差异小于n(n为0以上的整数)时,能够不执行参阅图1以及图2进行说明的所有过程而利用限幅最大值和最小值的平均值等任意的信息对影像进行重建。其中,相应的n值能够通过当前区域的上级报头进行传送。当样本自适应偏移(sao)带状偏移(bo)模式的可用带状区域区间小于4个时,所传送的偏移值的数量能够少于4个。
[0175]
图8是对将带状偏移(bo)模式的可用带状区域区间再细分成32个带状区域区间的状态进行图示的示意图。
[0176]
如图8中的(a)所图示,当与任意的区域内限幅范围对应的带状偏移(bo)模式的带状区域为带状区域9至带状区域26时,如图8中的(b)所图示,能够将可用带状区域(带状区域9至带状区域26)的区间再划分成32个带状区域区间。
[0177]
如图8中的(b)所示,在将可用带状区域区间再划分成32个带状区域区间执行编码/解码时,能够同样使用参阅图5以及图6进行说明的样本自适应偏移(sao)信息编码以及解码算法。在如上所述的情况下,能够对一个带状区域的范围进行进一步细分,从而能够实现更加精密的带状区域偏移滤波。
[0178]
图9是用于对利用任意区域单位的限幅范围执行残差区块系数的补正的方法进行说明的示意图。参阅图9进行说明的残差区块的系数补正,能够以任意的区域单位执行或不执行。
[0179]
在图9中,标记在原始区块901、预测区块902、残差区块903以及最终残差区块904内部栅格中的数字代表相应像素的像素值。通过从原始区块910的像素值对预测区块902的像素值进行减法运算,能够生成残差区块903。通过对残差区块903进行补正,能够生成最终残差区块904。
[0180]
在假定原始区块901或包含原始区块901的任意区域内的像素值的最小值为50且最大值为100的情况下,原始区块901的限幅范围为50~100。在原始区块901中经过明暗处理的像素代表具有当前限幅范围的最大值或最小值的像素。
[0181]
残差区块903的残差系数补正,能够对与原始区块901中经过明暗处理的像素位置对应的残差区块903中经过明暗处理的像素执行。具体来讲,对残差区块903中没有经过明暗处理的残差像素的像素值的平均值(在图9中为-2)进行计算。接下来,将残差区块903中经过明暗处理的像素替代成上述所计算出的平均值。通过如上所述的过程,能够生成最终残差区块904。此外,能够利用如最大值、最小值、中间值、最频值、加权平均值等其他统计学数值替代适用于残差系数补正的平均值。
[0182]
图10是用于对以图像单位执行限幅信息的编码的方法进行说明的示意图。
[0183]
在步骤s1001,以当前图像单位对图像内像素值的最大值以及最小值进行探索。在步骤s1002,对相应的最大值以及最小值进行编码。对最大值以及最小值能够直接进行编码。或者,也能够在对最小值进行编码之后再对最大值与最小值之间的差异值进行编码。或者,也能够在对最打值进行编码之后再对最大值与最小值之间的差异值进行编码。此时,最大值以及最小值的编码信息能够通过图像层或条带层等进行传送。上述图像单位能够变更为任意的区域单位。上述任意的区域,能够是如条带、并行区块、编码树单元(ctu)以及编码单元(cu)等。
[0184]
图11是用于对以图像单位执行限幅信息的解码的方法进行说明的示意图。在步骤s1101,能够对当前图像的最大值以及最小值信息进行解码。上述最大值以及最小值信息能够被包含于从影像编码装置100传送的传送单位。上述传送单位能够是图像层或条带层。上述最大值以及最小值信息能够按照参阅图10进行说明的方式进行编码和传送。上述图像单位能够变更为任意的区域单位。上述任意的区域,能够是如条带、并行区块、编码树单元(ctu)以及编码单元(cu)等。
[0185]
图12是用于对以任意区块单位执行限幅信息的编码的方法进行说明的示意图。在步骤s1201,以当前区块单位对区块内的最大值以及最小像素值进行探索。在步骤s1202,对相应的最大值以及最小值进行编码。对最大值以及最小值能够直接进行编码。或者,也能够在对最小值进行编码之后再对最大值与最小值之间的差异值进行编码。或者,也能够在对最打值进行编码之后再对最大值与最小值之间的差异值进行编码。此时,最大值以及最小值的编码信息能够以区块单位进行传送。上述区块单位,能够是如任意的编码区块单位或预测区块单位等。
[0186]
图13是用于对以任意区块单位执行限幅信息的解码的方法进行说明的示意图。在步骤s1301,能够对当前区块的最大值以及最小值信息进行解码。上述最大值以及最小值信息能够被包含于从影像编码装置100传送的传送单位。上述传送单位,能够是如任意的编码区块单位或预测区块单位。上述最大值以及最小值信息能够按照参阅图12进行说明的方式进行编码和传送。
[0187]
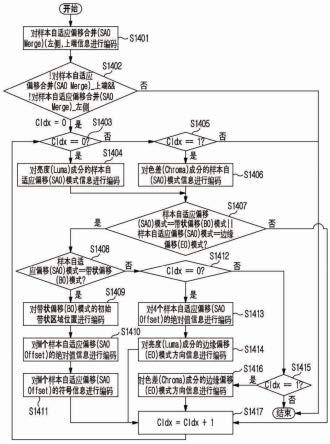
图14是用于对适用本发明之一实施例的以限幅范围为基础执行样本自适应偏移(sao)信息的编码的方法进行说明的顺序图。
[0188]
对步骤s1401至步骤s1406的说明,与对图5中的步骤s501至步骤s506的说明相同。
[0189]
在步骤s1407,当当前区块的样本自适应偏移(sao)模式为样本自适应偏移(sao)非动作模式时跳转到步骤s1417,而当为当前区块的带状偏移(bo)模式或边缘偏移(eo)模式中的某一个时跳转到步骤s1408。
[0190]
在步骤1408,判断当前区块的样本自适应偏移(sao)模式是否为带状偏移(bo)模式,当为带状偏移(bo)模式时跳转到步骤s1409,当不为带状偏移(bo)模式时跳转到步骤s1412。
[0191]
在步骤s1409,对用于指示带状偏移(bo)模式的连续的带状区域区间是从哪一个带状区域区间开始的初始带状区域位置进行编码。
[0192]
在步骤s1410,对用于带状偏移(bo)模式的m个偏移绝对值信息进行编码。如上所述,带状偏移(bo)模式的可用带状区域区间可能会根据限幅范围发生变更。因此,根据初始带状区域位置,需要进行传送的偏移的数量也可能会发生变更。此外,根据可用带状区域的数量,需要进行传送的偏移的数量也可能会发生变更。上述m代表需要进行传送的偏移的数量,这可能会根据限幅范围发生变更。例如在图7中所图示的示例中,如果初始带状区域位置为第25号带状区域,因为可用带状区域包括第25号带状区域以及第26号带状区域等2个,因此能够仅对2个偏移值进行传送。
[0193]
在步骤s1411,能够对与在步骤s1410进行传送的偏移数量(m)对应的偏移符号信息进行编码。
[0194]
在步骤s1412,判断cidx是否为0,当为0时跳转到步骤s1413,当不为0时跳转到步骤s1415。
[0195]
在步骤s1413,对在边缘偏移(eo)模式中使用的4个偏移绝对值信息进行编码。
[0196]
在步骤s1414,对亮度成分的边缘偏移(eo)模式的方向信息进行编码。
[0197]
在步骤s1415,判断cidx是否为1,当不为1时结束步骤,当为1时跳转到步骤s1416。
[0198]
在步骤s1416,对色差成分的边缘偏移(eo)模式的方向信息进行编码。其中,色差成分的cb、cr成分能够共享相同的方向信息。
[0199]
在步骤s1417,将cidx的值加1并跳转到步骤s1403重复如上所述的过程。
[0200]
图15是用于对适用本发明之实施例的以限幅范围为基础执行样本自适应偏移(sao)信息的解码的方法进行说明的顺序图。
[0201]
对步骤s1501至步骤s1506的说明,与对图6中的步骤s601至步骤s606的说明相同。
[0202]
在步骤s1507,当当前区块的样本自适应偏移(sao)模式为样本自适应偏移(sao)非动作模式时跳转到步骤s1516,而当当前区块的样本自适应偏移(sao)模式为带状偏移(bo)模式或边缘偏移(eo)模式时跳转到步骤s1508。
[0203]
在步骤1508,判断当前区块的样本自适应偏移(sao)模式是否为带状偏移(bo)模式,当为带状偏移(bo)模式时跳转到步骤s1509,当不为带状偏移(bo)模式时跳转到步骤s1512。
[0204]
在步骤s1509,对在图14中的步骤s1409进行编码的带状偏移(bo)模式的初始带状区域位置进行解码。
[0205]
在步骤s1510,对在图14中的步骤s1410进行编码的带状偏移(bo)模式用的m个偏移绝对值信息进行解码。
[0206]
在步骤s1511,对在图14中的步骤s1411进行编码的m个偏移符号信息进行解码。
[0207]
在步骤s1512,判断cidx是否为0,当为0时跳转到步骤s1513,当不为0时跳转到步骤s1515。
[0208]
在步骤s1513,对在图14中的步骤s1413进行编码的在边缘偏移(eo)模式下使用的4个偏移绝对值信息进行解码。
[0209]
在步骤s1514,对在图14中的步骤s1414进行编码的亮度成分的边缘偏移(eo)模式的方向信息进行解码。
[0210]
在步骤s1515,判断cidx是否为1,当不为1时结束步骤,当为1时跳转到步骤s1516。
[0211]
在步骤s1516,对色差成分的边缘偏移(eo)模式的方向信息进行解码。其中,色差成分的cb、cr成分能够共享相同的方向信息。
[0212]
在步骤s1517,将cidx的值加1并跳转到步骤s1503重复如上所述的过程。
[0213]
图16是用于对适用本发明的限幅带状区域决定方法进行说明的示意图。
[0214]
如图16所图示的实例,能够在如当前区块、条带、并行区块、区块等任意的区域单位,利用预先设定的限幅带状区域中的最佳限幅带状区域决定可在带状偏移(bo)模式下可用的带状区域区间。
[0215]
在图16中的(a)所图示的实例中,最小像素值位置为0,而最大像素值位置为255。其中,预先设定的限幅带状区域是指通过将最大像素值至最小像素值范围分割成n(n》1,n为整数)个区间而获得的各个区间。影像编码装置100以及影像解码装置200关于限幅带状区域能够共享预先约定的信息。或者,影像编码装置100能够将与限幅带状区域相关的信息传送到影像解码装置200。或者,影像编码装置100以及影像解码装置200能够利用查找表对与决定限幅带状区域相关的多种变形例进行管理,影像编码装置100能够仅将与查找表相关的索引信息传送到影像解码装置200。
[0216]
在图16的(a)所图示的实例中,限幅带状区域为共计8个。限幅带状区域8代表整体像素区间(0~255),限幅带状区域1至7代表(0~63)、(32-95)、(64-127)、(96-159)、(128-191)、(160-223)、(192-255)像素区间。在图16的(a)所图示的实例中,限幅带状区域以与相邻的限幅带状区域重叠的方式设定。但是,并不限定于此,限幅带状区域也能够以不与相邻的限幅带状区域重叠的方式设定。或者,也能够以一部分限幅带状区域与其他限幅带状区域重叠而一部分限幅带状区域不与其他限幅带状区域重叠的方式设定。
[0217]
在以当前图像、条带、并行区块或任意的区块单位对相应区域内的像素值进行扫描之后,能够判断相应区域内的像素值的范围属于预先设定的限幅带状区域中的哪一个限幅带状区域。在16中的(a)所图示的实例中,判定当前区域的像素全部分布于限幅带状区域5内。如图16中的(b)所图示,限幅带状区域5对应于带状偏移(bo)模式的32个带状区域中的第17号至第24号带状区域。即,在当前区域的带状偏移(bo)模式中可用的带状区域区间为图16的(b)中经过明暗处理的第17号至第24号带状区域区间。在当前区域内,没有属于带状偏移(bo)模式的第1号至第16号带状区域、第25号至第32号带状区域的像素存在。因此,能够在不将相应的带状区域作为带状偏移(bo)模式的带状区域考虑的情况下执行滤波。
[0218]
图17是用于对以图像单位执行限幅信息的编码的方法进行说明的示意图。在步骤
s1701,以当前图像单位对图像内像素值的最大值以及最小像素值进行探索。在步骤s1702,对包含相应的最大值以及最小值的限幅带状区域索引信息进行编码。此时,限幅带状区域索引信息能够通过图像层或条带层等进行传送。限幅带状区域索引信息能够是与一个限幅带状区域相关的信息。或者,限幅带状区域索引信息能够是与两个限幅带状区域相关的信息。例如,当没有同时包含当前图像的最大值以及最小值的限幅带状区域存在时,限幅带状区域索引信息能够包括与包含最大值的限幅带状区域相关的信息以及与包含最小值的限幅带状区域相关的信息。
[0219]
图18是用于对以图像单位执行限幅信息的解码的方法进行说明的示意图。
[0220]
在步骤s1801,能够对当前图像的限幅带状区域索引信息进行解码。限幅带状区域索引信息能够被包含于从影像编码装置100传送的传送单位。上述传送单位能够是图像层或条带层。上述限幅带状区域索引信息能够按照参阅图17进行说明的方式进行编码和传送。
[0221]
图19是用于对以任意区块单位执行限幅信息的编码的方法进行说明的示意图。
[0222]
在步骤s1901,以当前区块单位对区块内的最大值以及最小值进行探索。在步骤s1902,对包含相应的最大值以及最小值的限幅带状区域索引信息进行编码。此时,限幅带状区域索引信息能够以区块单位进行传送。例如,限幅带状区域索引信息能够以任意的编码区块单位或预测区块单位等进行传送。限幅带状区域索引信息能够是与一个限幅带状区域相关的信息。或者,限幅带状区域索引信息能够是与两个限幅带状区域相关的信息。例如,当没有同时包含当前区块的最大值以及最小值的限幅带状区域存在时,限幅带状区域索引信息能够包括与包含最大值的限幅带状区域相关的信息以及与包含最小值的限幅带状区域相关的信息。
[0223]
图20是用于对以任意区块单位执行限幅信息的解码的方法进行说明的示意图。在步骤s2001,能够对当前区块的限幅带状区域索引信息进行解码。限幅带状区域索引信息能够被包含于从影像编码装置100传送的传送单位。上述传送单位,能够是如任意的编码区块单位或预测区块单位。上述限幅带状区域索引信息能够按照参阅图19进行说明的方式进行编码和传送。
[0224]
图21是用于对在影像编码装置100以及影像解码装置200中的适用本发明的限幅适用位置进行说明的示意图。
[0225]
在图21的(a)中对在影像编码装置100中适用限幅的位置进行了图示。如图21中的(a)所图示,适用本发明的限幅能够适用于经过预测部生成的预测区块,也能够适用于经过环路滤波部之前的重建像素,还能够在经过环路滤波部之后适用。此外,如图21中的(a)所图示,还能够在环路滤波部内经过去块滤波器之后适用。既能够对如上所述的限幅位置全部适用限幅,也能够在一部分位置不适用限幅。但是,在经过图21的(a)中斜线处理的箭头的限幅位置,即,在经过环路滤波部之后能够必须适用限幅。
[0226]
在图21的(b)中对在影像解码装置200中适用限幅的位置进行了图示。如图21中的(b)所图示,适用本发明的限幅能够在经过预测部之后适用,也能够适用于经过环路滤波部之前的重建像素,还能够在经过环路滤波部之后适用。此外,如图21中的(c)所图示,还能够在环路滤波部内经过去块滤波器之后适用。既能够对如上所述的限幅位置全部适用限幅,也能够在一部分位置不适用限幅。但是,影像解码装置200必须在与影像编码装置100执行
限幅的位置相同的位置上适用限幅。此外,在经过图21的(b)中斜线处理的箭头的限幅位置,即,在经过环路滤波部之后能够必须适用限幅。
[0227]
图22是用于对在边缘偏移(eo)模式中考虑到限幅范围的情况下决定不同范畴的偏移值的方法进行说明的示意图。
[0228]
边缘偏移(eo)模式的各个偏移的符号(正或负)信息是按照不同范畴预先设定。在影像编码装置100中,能够按照不同的范畴利用如率失真优化(rdo)等多种方法决定最佳偏移值。但是,如果在将所决定的偏移值适用于当前像素时超出限幅范围,则在率失真优化(rdo)的观点下能够不考虑相应的偏移值。即,在以任意的区域单位决定限幅范围之后,能够以此为基础限制偏移范围。
[0229]
例如,假定当前区域的限幅范围为100至200且偏移范围为-7至7。此外,假定当前区域内的任意像素的周边像素的像素值均为199,并假定当前像素的像素值为197。在如上所述的假定下,因为偏移对象像素属于范畴1,因此偏移的符号为正( )。当适用于当前像素的偏移值为5时,当前像素的滤波结果值为202,这是超出当前区域的限幅范围的值。在如上所述的情况下,能够将限幅范围限制为-7至3。在率失真优化(rdo)的观点下,能够通过判断-7至3的范围内的最佳偏移值而决定偏移。因此,在如图22所图示的实例中,能够在仅考虑对偏移进行加法运算的像素范围存在于限幅范围内的偏移值的情况下,在相应的范围内决定最佳偏移值。
[0230]
图23是用于对在带状偏移(bo)模式中决定各个带状区域的偏移值时,在考虑到限幅范围的情况下决定偏移的方法进行说明的示意图。
[0231]
在带状偏移(bo)模式下,能够分别决定4个连续的带状区域的偏移值。在决定各个带状区域的偏移值时,在率失真代价(rdo)的观点下能够不考虑滤波后的像素超出限幅范围的偏移值。对于4个连续的带状区域中超出限幅范围的最小值或最大值的带状区域,能够在考虑到限幅范围的情况下变更偏移范围。这表示通过以任意的区域单位决定限幅范围,能够针对不同的带状区域限制偏移范围。
[0232]
在图23所图示的实例中,当带状偏移(bo)模式的对象带状区域为带状区域9至带状区域12时,带状区域9是包含限幅最小值的带状区域。因此,对带状区域9的偏移值进行加法运算的当前像素值小于限幅最小值的偏移能够不作为最佳偏移进行考虑。或者,当带状偏移(bo)模式的对象带状区域为带状区域13至带状区域16时,对带状区域16的偏移值进行加法运算的当前像素值大于限幅最大值的偏移能够不作为最佳偏移进行考虑。
[0233]
图24是用于对执行样本自适应偏移(sao)信息的编码的方法进行说明的示意图。
[0234]
对步骤s2401至步骤s2407的说明,与对图5中的步骤s501~步骤s507的说明相同。
[0235]
在步骤s2408,对4个偏移绝对值信息进行编码。
[0236]
在步骤2409,判断当前区块的样本自适应偏移(sao)模式是否为带状偏移(bo)模式,当为带状偏移(bo)模式时跳转到步骤s2410,当不为带状偏移(bo)模式时跳转到步骤s2412。
[0237]
在步骤s2410,对n个偏移符号信息进行编码。n能够是3或者4。在上述步骤s2408,对4个偏移绝对值信息进行编码,在步骤s2410,对n个符号信息进行编码。当4个连续的带状区域中的一部分带状区域包含限幅最大值或最小值时,对于相应带状区域的偏移值,能够不对滤波后的当前像素值超出限幅范围的偏移进行考虑。因此,对于包含限幅最大值的带
状区域,能够不对一部分偏移的正( )符号信息进行编码,而对于包含限幅最小值的带状区域,能够不对一部分偏移的负(-)符号信息进行编码。
[0238]
例如,假定当前区域的限幅范围为100至200,4个连续的带状区域为带状区域12至带状区域15,需要在带状偏移(bo)模式下进行滤波的当前像素的范围为96至135。此外,当在带状区域12中需要进行滤波的实际当前像素的范围为101至103时,-4以下的值能够不作为偏移的范围进行考虑。其中,当在步骤s2408中进行编码的带状区域12的偏移为4以上时,在步骤s2410,能够不对符号信息进行编码。此时,带状区域12的偏移符号能够决定为正( )信息。
[0239]
在步骤s2411,对用于指示带状偏移(bo)模式的连续的带状区域区间是从哪一个带状区域区间开始的初始带状区域位置进行编码。
[0240]
在步骤s2412,判断cidx是否为0,当cidx为0时跳转到步骤s2413,当不为0时跳转到步骤s2414。
[0241]
在步骤s2413,对亮度成分的边缘偏移(eo)模式的方向信息进行编码。
[0242]
在步骤s2414,判断cidx是否为1,当cidx不为1时结束步骤,当为1时跳转到步骤s2415。
[0243]
在步骤s2415,对色差成分的边缘偏移(eo)模式的方向信息进行编码。其中,色差成分的cb、cr成分能够共享相同的方向信息。
[0244]
在步骤s2416,将cidx的值加1并跳转到步骤s2403重复如上所述的过程。
[0245]
图25是用于对执行样本自适应偏移(sao)信息的解码的方法进行说明的示意图。
[0246]
对步骤s2501至步骤s2507的说明,与对图6中的步骤s601至步骤s607的说明相同。
[0247]
在步骤s2508,对4个偏移绝对值信息进行解码。
[0248]
在步骤2509,判断当前区块的样本自适应偏移(sao)模式是否为带状偏移(bo)模式,当为带状偏移(bo)模式时跳转到步骤s2510,当不为带状偏移(bo)模式时跳转到步骤s2512。
[0249]
在步骤s2510,对n个偏移符号信息进行解码。n能够是3或者4。
[0250]
在步骤s2511,对用于指示带状偏移(bo)模式的连续的带状区域区间是从哪一个带状区域区间开始的初始带状区域位置进行解码。
[0251]
在步骤s2512,判断cidx是否为0,当cidx为0时跳转到步骤s2513,当不为0时跳转到步骤s2514。
[0252]
在步骤s2513,对亮度成分的边缘偏移(eo)模式的方向信息进行解码。
[0253]
在步骤s2514,判断cidx是否为1,当cidx不为1时结束步骤,当为1时跳转到步骤s2515。
[0254]
在步骤s2515,对色差成分的边缘偏移(eo)模式的方向信息进行解码。其中,色差成分的cb、cr成分能够共享相同的方向信息。
[0255]
在步骤s2516,将cidx的值加1并跳转到步骤s2503重复如上所述的过程。
[0256]
图26是用于对适用本发明之又一实施例的以限幅范围为基础执行解码器侧运动向量推导(dmvd,decoder-side motion vector derivation)的过程进行说明的示意图。
[0257]
通常,影像编码装置对与运动向量相关的信息进行编码并将其包含到比特流中传送到影像解码装置。影像编码装置能够通过对比特流进行解码而对运动向量进行重建。在
解码器侧运动向量推导(dmvd)的情况下,能够在影像解码装置一侧利用特定的算法推导出与运动向量相关的信息,从而替代在比特流中对与运动向量相关的信息进行明示编码的方式。例如,上述特定的算法能够是模板匹配算法(template matching algorithm)。
[0258]
在本发明中,影像解码装置能够以限幅特性为基础执行解码器侧运动向量推导(dmvd)。例如,能够通过识别出具有与当前区块或当前区块所属的区域相同或类似的限幅特性的参考图像内区域而有效地执行解码器侧运动向量推导(dmvd)。上述限幅特性能够是指限幅范围,但是并不限定于此,能够包含从限幅范围推导出的与限幅相关的多种信息。
[0259]
具体来讲,为了执行解码器侧运动向量推导(dmvd)而需要决定初始运动向量,在决定初始运动向量时能够对限幅特定进行考虑。在图26所图示的实例中,如果当前区块的限幅特性为b,则能够从参考图像内的区域中识别出限幅特性为b的区域,然后以上述区域为基础决定初始运动向量(第1或第2初始运动向量)。
[0260]
因为类似区块的限幅特性也类似,因此在适用本发明时能够以极高的概率决定最佳的初始运动向量。因此,在适用本发明时,能够显著降低执行解码器侧运动向量推导(dmvd)的影像解码装置的运动推测的复杂度。
[0261]
在适用本发明的又一实施例中,能够通过将限幅特性适用于熵编码和/或解码而提升语法元素的熵编码效率。具体来讲,能够在考虑到任意的影像区域的限幅特性的情况下自适应地选择特定的语法元素的初始概率。
[0262]
例如,当编码区块的限幅范围较宽时,即,当最大值与最小值之间的差异较大时,相应编码区块的预测准确度相对较低。因为在预测准确度相对较低时包含残差区块不为0的变换系数的概率较高,因此相应编码区块的cbg_flag为“1”的概率相对高于为“0”的概率。
[0263]
与此相反,当编码区块的限幅范围较窄时,即,当最大值与最小值之间的差异较小时,相应编码区块的预测准确度相对较高。因为在预测准确度相对较高时包含残差区块不为0的变换系数的概率较低,因此相应编码区块的cbg_flag为“0”的概率相对高于为“1”的概率。
[0264]
考虑到如上所述的统计学特性,对于限幅范围较宽的编码区块,能够使用cbf_flag为“1”的概率相对较高的初始概率信息。与此相反,对于限幅范围较窄的编码区块,能够使用cbf_flag为“0”的概率相对较高的初始概率信息。
[0265]
上述cbf_flag能够是用于指示相应区块内是否包含不为0的变换系数的标志。当cbf_flag为1时,代表相应区块包含至少一个不为0的变换系数。当cbf_flag为0时,代表相应区块不包含不为0的变换系数。
[0266]
作为又一实例,当编码区块的限幅范围较宽时,对于相应的编码区块,画面间预测具有相对较高的预测准确度。因此,相应编码区块的predmodeflag为“1”的概率相对高于为“0”的概率。
[0267]
与此相反,当编码区块的限幅范围较窄时,对于相应的编码区块,画面内预测具有相对较高的预测准确度。因此,相应编码区块的predmodeflag为“0”的概率相对高于为“1”的概率。
[0268]
考虑到如上所述的统计学特性,对于限幅范围较宽的编码区块,能够使用predmodeflag为“1”的概率相对较高的初始概率信息。与此相反,对于限幅范围较窄的编码
区块,能够使用predmodeflag为“0”的概率相对较高的初始概率信息。
[0269]
上述predmodeflag能够是用于指示适用于相应区块的预测方法的标志。当predmodeflag为1时,代表对相应区块适用画面间预测。当predmodeflag为0时,代表对相应区块适用画面内预测。
[0270]
如上所述,能够在考虑到与限幅范围相关的特性的情况下对特定的语法元素的上下文进行优化。上述特定的语法元素并不限定于cbf_flag以及predmodeflag,对于其他语法元素也能够适用基于限幅范围的自适应的上下文概率。
[0271]
图27是用于对适用本发明之又一实施例的以限幅范围为基础执行去块滤波的过程进行说明的顺序图。
[0272]
如图27所图示,a区块与b区块相互相邻。假定a区块的限幅范围为50至160,b区块的限幅范围为90至200。在图27所图示的实例中,a区块的限幅范围与b区块的限幅范围在90至160的范围内重叠。
[0273]
在本发明中,在考虑到a区块的限幅范围以及b区块的限幅范围的特性的前提下自适应地执行去块滤波。具体来讲,以a区块的限幅范围以及b区块的限幅范围的重叠信息为基础自适应地执行去块滤波。
[0274]
例如,在a区块的限幅范围以及b区块的限幅范围不互相重叠的情况下,因为两个区块是包含于相互不同的区域中的区块,因此不适于对两个区块之间的边界进行滤波。因此,在如上所述的情况下,对于a区块以及b区块之间的边界能够不执行滤波。或者,即使是在执行滤波的情况下,能够通过为与滤波对象像素同属于相同区块内的像素设定较高的(或极高的)滤波系数而减少对相邻区块内的像素造成的影响。
[0275]
在a区块的限幅范围以及b区块的限幅范围部分重叠的情况下,能够为与滤波对象像素同属于相同区块内的像素设定较高的滤波系数。关于设定多高的滤波系数,能够根据限幅范围的重叠程度自适应地决定。例如,限幅范围的重叠程度越低,能够为与滤波对象像素同属于相同区块内的像素设定更高的滤波系数。
[0276]
在适用本发明的又一实施例中,能够在考虑到限幅特性的情况下限制性地使用预测模式。
[0277]
例如,在编码区块的限幅范围较宽的情况下,能够决定为对相应的编码区块可以使用画面内预测以及画面间预测的所有预测。
[0278]
与此相反,在编码区块的限幅范围较窄的情况下,能够决定为对相应的编码区块只可以使用画面内预测中的均值(dc)模式或平面(planar)模式和/或画面间预测中的合并模式。
[0279]
对于画面内预测模式的适用,当上端相邻区块的限幅特性与当前区块的限幅特性类似时,能够执行参考上端相邻区块的像素的画面内预测。与此相反,当左侧相邻区块的限幅特性与当前区块的限幅特性类似时,能够执行参考左侧相邻区块的像素的画面内预测。
[0280]
在如上所述的实施例中,能够通过将限幅范围与特定的临界值进行比较而执行对限幅范围较宽还是较窄的判断(宽窄的判断)。特定的临界值能够通过比特流进行信令,或使用在影像编码装置以及影像解码装置中预先约定的临界值。上述特定的临界值能够包括用于判断限幅范围是否较宽的第1临界值以及用于判断限幅范围是否较窄的第2临界值。当限幅范围位于第1临界值与第2临界值之间时,能够不适用本发明的上述实施例。
[0281]
在如上所述的实施例中,能够通过与特定的临界值进行比较而执行对限幅范围的重叠程度的判断。特定的临界值能够通过比特流进行信令,或使用在影像编码装置以及影像解码装置中预先约定的临界值。上述限幅范围的重叠程度能够根据各个区块的限幅范围较宽或较窄的判断结果自适应地决定。例如,当a区块和/或b区块的各自的限幅范围较窄时,即使是两个区块的限幅范围相对较窄也能够判定为重叠较多。与此相反,当a区块和/或b区块的各自的限幅范围较宽时,即使是两个区块的限幅范围相对较宽也能够判定为重叠较少。
[0282]
在如上所述的实施例中,对限幅范围的类似于否的判断能够根据限幅范围的宽窄以及限幅范围的重叠程度中的至少一个决定。
[0283]
在如上所述的实施例中,限幅范围能够通过对以任意的区域单位传送的与限幅范围相关的信息进行解码而推导得出。但是,即使是不对与限幅范围相关的信息进行传送,也能够通过对利用限幅范围的本公开的多种实施例进行变形而实现实际上类似的效果。例如,在如上所述的实施例中,能够通过对需要推导出限幅范围的区域中所包含的像素的最大值和/或最小值进行探索而决定相应区域的限幅范围。具体来讲,在参阅图27进行说明的实施例中,能够通过对a区块和/或b区块的已重建像素的最大值和/或最小值进行探索而决定a区块和/或b区块的限幅范围。通过如上所述的方式决定的限幅范围,能够以与通过对与限幅范围相关的信息进行解码而推导出的限幅范围相同的方式使用。
[0284]
本公开中的示例性方法为了说明的明确性而以动作序列的方式进行了描述,但这并不是为了对步骤的执行顺序进行限定,在必要时也能够同时或以不同的顺序执行各个步骤。为了实现本公开中的方法,也能够在示例的步骤基础上追加包含其他步骤,或只包含除一部分步骤之外的剩余步骤,或在排除一部分步骤之后追加包含其他步骤。
[0285]
本公开的多种不同的实施例并不是对所有可能的组合进行罗列的结果,只是为了对本公开的代表性形态进行说明,在多种不同的实施例中进行说明的事项能够独立适用或以两种以上的组合方式适用。
[0286]
此外,本公开中的多种不同的实施例能够通过硬件、固件(firmware)、软件或上述之结合等实现。当通过硬件实现时,能够通过一个或多个acics(application specific integrated circuits,专用集成电路)、dsps(digital signal processors,数字信号处理器)、dspds(digital signal processing devices,数字信号处理装置)、plds(programmable logic devices,可编程逻辑器件)、fpgas(field programmable gate arrays,现场可编程门阵列)、通用处理器(general processor)、控制器、微控制器、微处理器等实现。
[0287]
本公开的范围包括可使多种不同实施例的方法中的动作在装置或计算机上执行的软件、设备可执行的指令(例如操作系统、应用程序、固件(firmware)、程序等)以及保存有上述软件或指令等的装置或计算机可执行的非暂时性计算机可读介质(non-transitory computer-readable medium)。
[0288]
产业上的可利用性
[0289]
本发明能够用于对影像进行编码/解码。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。