技术特征:
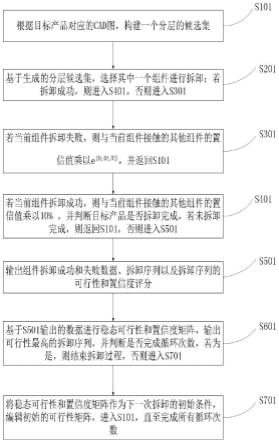
1.基于双循环模糊进化的机器人拆卸序列规划方法,其特征在于,包括以下步骤:s101.构建步骤:根据目标产品对应的cad图,构建一个分层的候选集;s201.拆卸步骤:基于生成的分层候选集,选择其中一个组件进行拆卸;若拆卸成功,则进入s401,否则进入s301,s301.惩罚步骤:若当前组件拆卸失败,则与当前组件接触的其他组件的置信值乘以e
(0.01/u)
其中u为当前置信度值,并返回s101;s401.奖励步骤:若当前组件拆卸成功,则与当前组件接触的其他组件的置信值乘以10%,并判断目标产品是否拆卸完成,若未拆卸完成,则返回s101,否则进入s501;s501.当前拆卸数据输出步骤:输出组件拆卸成功和失败数据、拆卸序列以及拆卸序列的可行性和置信度评分;s601.系统数据输出步骤:基于s501输出的数据进行稳态可行性和置信度矩阵计算,输出可行性最高的拆卸序列,并判断是否完成循环次数,若为是,则结束拆卸过程,否则进入s701;s701.初始条件更新步骤:将稳态可行性和置信度矩阵作为下一次拆卸的初始条件,编辑初始的可行性矩阵,进入s101,直至完成所有循环次数。2.根据权利要求1所述的基于双循环模糊进化的机器人拆卸序列规划方法,其特征在于,s101构建步骤具体包括以下步骤:s1011根据目标产品的cad爆炸图构建接触矩阵;s1012设置初始的可行性矩阵和置信度矩阵;s1013根据组成目标产品的每个组件与其他组件接触数量构建分层候选集。3.根据权利要求2所述的基于双循环模糊进化的产品拆卸序列规划方法,其特征在于,在s1011的接触矩阵中,“1”表示两个组件在相对运动方向上有接触,“0”表示两个组件非接触。4.根据权利要求3所述的基于双循环模糊进化的机器人拆卸序列规划方法,其特征在于,对接触矩阵按照组件对所有方向干扰进行压缩得到关系矩阵,如果组件在任何一份或多个给定方向上与另一组件接触,则输出值为1,否则为0。5.根据权利要求2所述的基于双循环模糊进化的机器人拆卸序列规划方法,其特征在于,s1012的可行性矩阵表示两个组件相对运动的可行性,分值范围为0-1,其中,“0”表示两个组件完全可自由移动,“1”表示两个组件直接接触,无法移动。6.根据权利要求2所述的基于双循环模糊进化的机器人拆卸序列规划方法,其特征在于,s1012的置信度矩阵评估可行性的可信度,可信度值的范围为0-1,其中,“0”表示可行性绝对确定,“1”表示可行性绝对不确定。7.基于双循环模糊进化的机器人拆卸序列规划系统,其特征在于,应用权利要求1-6任一项所述的基于双循环模糊进化的机器人拆卸序列规划方法,包括:构建模块、拆卸模块、惩罚模块、奖励模块、当前拆卸数据输出模块、系统数据输出模块、初始条件更新模块、第一
判断模块、第二判断模块、第三判断模块和结束模块;构建模块,与拆卸模块的输入端连接,用于根据目标产品对应的cad图,构建一个分层的候选集;拆卸模块,与第一判断模块的输入端连接,用于基于生成的分层候选集,选择其中一个组件进行拆卸;第一判断模块,用于判断当前组件是否拆卸成功,若拆卸成功,则进行奖励机制,否则继续进行候选集构建;惩罚模块,与第一判断模块的第一输出端连接,用于当前组件拆卸失败,则将与当前组件接触的其他组件的置信值乘以e
(0.01/u)
,并继续进行候选集构建;奖励模块,与第一判断模块的第二输出端连接,用于当前组件拆卸成功,则将与当前组件接触的其他组件的置信值乘以10%;第二判断模块,与奖励模块的输出端连接,用于判断目标产品是否拆卸完成,若未拆卸完成,则继续进行候选集构建,否则输出当前拆卸数据;当前拆卸数据输出模块,与第二判断模块的第一输出端连接,用于输出组件拆卸成功和失败数据、拆卸序列以及拆卸序列的可行性和置信度评分;系统数据输出模块,与当前拆卸数据输出模块的输出端连接用于:基于基于的当前拆卸数据进行稳态可行性和置信度矩阵,输出可行性最高的拆卸序列;第三判断模块,与系统数据输出模块连接,用于判断是否完成循环次数,若为是,则结束拆卸过程,否则进行初始条件更新;结束模块,与第三判断模块的第一输出锻炼连接,用于结束拆卸过程;初始条件更新模块,与第三判断模块的第二输出锻炼连接,用于将稳态可行性和置信度矩阵作为下一次拆卸的初始条件,编辑初始的可行性矩阵,进行候选集构建,直至完成所有循环次数。
技术总结
本发明公开了基于双循环模糊进化的机器人拆卸序列规划方法及系统,涉及机器人与智能制造技术领域,包括:构建步骤、拆卸步骤、惩罚步骤、奖励步骤、当前拆卸数据输出步骤、系统数据输出步骤、初始条件更新步骤、第一判断步骤、第二判断步骤和第三判断步骤。本发明1)提出了一种面向再制造的产品拆卸序列规划的双循环模糊化进化方法;2)该双循环模糊进化方法可以应对报废产品组件之间的不确定干扰条件,并快速逼近其真实状态;3)该双循环模糊进化方法为基于机器人的再制造提供了在线适应故障并重新规划拆卸序列的能力,使得机器人自主拆卸成为可能。为可能。为可能。
技术研发人员:彭功状 叶强
受保护的技术使用者:航天数智(苏州)科技有限公司
技术研发日:2022.07.21
技术公布日:2022/10/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。