技术特征:
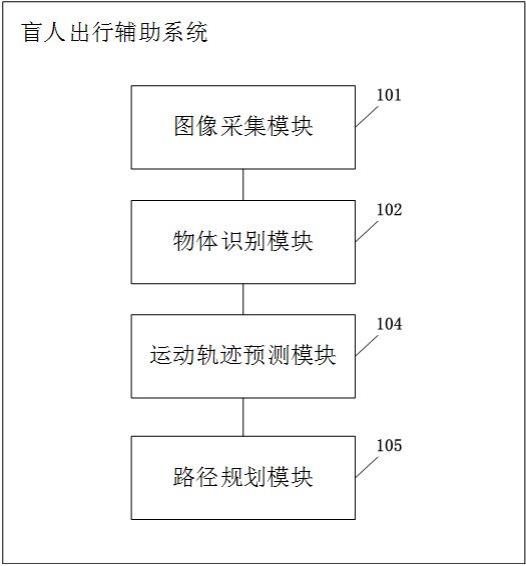
1.一种盲人出行辅助系统,其特征在于,所述系统包括至少一个图像采集模块、物体识别模块、运动轨迹预测模块和路径规划模块;所述图像采集模块被配置成获取预设角度范围内预设距离的图像信息;所述物体识别模块被配置成将所述图像信息输入至预先训练好的物体识别模型中,输出所述图像信息的物体识别结果;其中,所述物体识别结果包括静态个体和动态个体;所述运动轨迹预测模块被配置成将所述动态个体的坐标信息输入至预先训练好的运动轨迹预测模型中,输出所述动态个体在每个预设时间步长的坐标信息;所述路径规划模块被配置成基于所述动态个体在每个预设时间步长的坐标信息和所述静态个体的坐标信息,生成由起始位置到目标位置的移动路径。2.根据权利要求1所述的系统,其特征在于,所述系统还包括建图与定位模块,所述建图与定位模块被配置成基于所述图像信息和所述物体识别结果,利用slam算法构建俯视视角的相机坐标系下的octomap地图,将所述octomap地图转换为世界坐标系下的全局地图,并确定用户在所述全局地图中的相对位置信息。3.根据权利要求2所述的系统,其特征在于,所述路径规划模块具体被配置成将所述动态个体在每个预设时间步长的坐标信息、所述静态个体的坐标信息和所述相对位置信息输入至预先训练好的路径规划模型中,输出所述用户在所述全局地图中由起始位置到目标位置的移动路径规划结果。4.根据权利要求1-3任意一项所述的系统,其特征在于,所述运动轨迹预测模型由循环神经网络算法训练样本数据得到。5.根据权利要求1-3任意一项所述的系统,其特征在于,所述物体识别模型是由yolact-edge算法训练样本数据得到。6.一种盲人出行辅助方法,其特征在于,包括:获取预设角度范围内预设距离的图像信息;将所述图像信息输入至预先训练好的物体识别模型中,输出所述图像信息的物体识别结果;其中,所述物体识别结果包括静态个体和动态个体;将所述动态个体的坐标信息输入至预先训练好的运动轨迹预测模型中,输出所述动态个体在每个预设时间步长的坐标信息;基于所述动态个体在每个预设时间步长的坐标信息以及静态个体的坐标信息,生成由起始位置到目标位置的移动路径。7.根据权利要求6所述的方法,其特征在于,所述方法还包括:基于所述图像信息中的静态个体识别结果,基于slam算法构建俯视视角的相机坐标系下的octomap地图,并将所述octomap地图转换为世界坐标系下的全局地图;确定用户在所述全局地图中的相对位置信息。8.根据权利要求7所述的方法,其特征在于,所述基于所述动态个体在每个预设时间步长的坐标信息以及静态个体的坐标信息,生成由起始位置到目标位置的移动路径,具体包括:将所述动态个体在每个预设时间步长的坐标信息、所述静态个体的坐标信息和所述相对位置信息输入至预先训练好的路径规划模型中,输出在所述用户在所述全局地图中由起始位置到目标位置的移动路径规划结果。
9.一种盲人出行辅助设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求6至8任意一项所述的方法。
技术总结
本申请公开了一种盲人出行辅助系统、方法及设备,所述系统包括:至少一个图像采集模块,被配置成获取预设角度范围内预设距离的图像信息;物体识别模块,被配置成将所述图像信息输入至预先训练好的物体识别模型中,输出所述图像信息的物体识别结果;运动轨迹预测模块,被配置成将所述动态个体的坐标信息输入至预先训练好的运动轨迹预测模型中,输出所述动态个体在每个预设时间步长的坐标信息;路径规划模块,被配置成基于所述动态个体在每个预设时间步长的坐标信息和所述静态个体的坐标信息,生成由起始位置到目标位置的移动路径。本申请公开的系统能够提高盲人的出行效率,保证盲人的出行安全,提升盲人用户的体验效果。提升盲人用户的体验效果。提升盲人用户的体验效果。
技术研发人员:孙雷 李雨薇 郑可欣 关傲然 董璇枢
受保护的技术使用者:南开大学
技术研发日:2022.09.08
技术公布日:2022/10/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。