1.本发明涉及新体制雷达辐射源目标的行为意图辨识技术领域,具体地指一种新体制雷达辐射源目标的行为意图认知系统。
背景技术:
2.反辐射导弹是现代电子战中对雷达等电磁辐射源进行硬杀伤的最有效武器,与先进电磁频谱战设备相配合的反辐射源导弹攻击是未来电磁对抗中的重要手段。
3.由于战时很有可能出现大量未知的雷达信号,而未知雷达一般会分时实现多任务的执行,并且按雷达设计时预先设置的方式进行任务切换,未知雷达的连续工作过程可以看作是这些任务连续变换的过程。
4.每一部雷达工作时都有当前的使命和任务,而这些任务通过选择特定的功能来完成,因此雷达的功能是其静态做工状态的直接表达,雷达的功能决定其所能执行的任务,以及具有的威胁程度。而雷达功能的转换及其统计特性背后体现出的指挥员的作战意图,是指挥员战术及作战意图的直接体现。因此,雷达行为意图可以分解为按照特定规律排列的雷达功能或任务的执行。
5.软件化雷达行为通常由多个连续执行的任务组成,而行为的意图可由连续执行任务的工作状态体现。目前未知雷达辐射源目标的行为意图难以推测,这将对作战构成巨大的潜在威胁。
技术实现要素:
6.针对现有技术的不足之处,本发明提出一种新体制雷达辐射源目标的行为意图认知系统,精准分析出新体制雷达随着观测时间变化而呈现出的功能/状态变化,构建电磁目标行为意图表征模型。
7.为达到上述目的,本发明所设计的一种新体制雷达辐射源目标的行为意图认知系统,其特别之处在于:包括脉间信息特征参数提取模块、训练样本聚类模块、训练样本分区模块、训练样本学习模块、新体制雷达辐射源目标功能识别模块和新体制雷达辐射源目标行为意图推理模块;其中,所述脉间信息特征参数提取模块用于根据已知雷达辐射源目标的功能及对应的信号特性,分别提取各雷达辐射源的脉间信息特征参数,作为训练样本数据;所述训练样本聚类模块用于采用粗糙k-均值分类器对训练样本数据首先进行k-均值聚类,确定训练样本数据中的聚类个数k,将训练样本数据分成k个聚类,计算出每个聚类中的初始聚类中心;在k-均值聚类中引入上近似样本密度和下近似样本密度,根据初始聚类中心对每个聚类中的训练样本数据再次进行粗糙k-均值聚类,获得每个聚类中的新聚类中心;所述训练样本分区模块用于采用粗糙k-均值分类器在每个聚类中,以新聚类中心为球心,选取第一阈值rk作为半径,对每个聚类进行初次分区,若聚类中的训练样本数据到
新聚类中心的距离大于或等于第一阈值rk,则该训练样本数据属于拒绝区;选取比例系数λ,且0<λ<1,若聚类中的训练样本到新聚类中心的距离小于λrk,则该训练样本数据属于线性可分的确定区,若聚类中的训练样本数据到新聚类中心的距离大于λrk且小于rk,则该训练样本数据属于线性不可分的不确定区;所述训练样本学习模块用于采用粗糙k-均值分类器对确定区的训练样本进行训练学习,采用svm分类器对不确定区的训练样本进行训练学习;所述新体制雷达辐射源目标功能识别模块用于将未知的新体制雷达信号输入到基于粗糙k-均值分类器与svm联合分类器,通过粗糙k-均值分类器识别线性可分的雷达信号的功能,筛选线性不可分的雷达信号进入不确定区,并通过svm分类器对不确定区的雷达信号进行功能识别,最终分析出新体制雷达随着观测时间变化而呈现出的状态变化;所述新体制雷达辐射源目标行为意图推理模块用于输出电磁目标行为意图表征模型(q, vs, c, f),其中,q表示功能/状态集合,q=(s0, s1, ..., sn);vs表示功能/状态确认向量,v
s=
【v0,v1,...,vn】,vn表示功能/状态s
n 重复出现并得到确认;c表示功能/状态转换确认矩阵,它的元素c
ij
的值表示si→
sj功能/状态转换是否经过多次检测而确认;f表示功能/状态转换次数统计矩阵,矩阵的元素f
ij
代表在观测时间内发生si→
sj功能/状态转换的次数。
8.本发明的优点在于:1. 本发明通过精准分析出新体制雷达随着观测时间变化而呈现出的功能/状态变化,构建电磁目标行为意图表征模型;2. 本发明对已知雷达辐射源目标的功能识别/状态过程中,将上、下近似的概念引入到k-均值聚类中,形成粗糙k-均值聚类算法,并通过对训练样本进行加权,增加孤立点对初始聚类中心的影响,有效地解决噪声以及干扰的影响问题,提高了聚类准确率,实现对已知雷达辐射源目标功能/状态的精准识别,从而实现对新体制电磁辐射源目标功能/状态、以及行为意图的精准识别;本发明新体制雷达辐射源目标的行为意图认知系统能够精准分析出新体制雷达随着观测时间变化而呈现出的功能/状态变化,构建电磁目标行为意图表征模型。
附图说明
9.图1为本发明新体制雷达辐射源目标的行为意图认知系统的框图;图2为仿真试验环境示意图;图3为本发明应用在图2中的仿真试验的已知雷达辐射源目标功能认知准确率;图4为本发明应用在图2中的仿真试验的雷达辐射源目标t9“瞄准”行为的状态转换示意图;图5为本发明应用在图2中的仿真试验的雷达辐射源目标t9“瞄准”行为的认知准确率。
具体实施方式
10.以下结合附图和具体实施例对本发明作进一步的详细描述。
11.本新体制雷达辐射源目标的行为意图认知系统,如图1所示,包括脉间信息特征参
数提取模块1、训练样本聚类模块2、训练样本分区模块3、训练样本学习模块4、新体制雷达辐射源目标功能识别模块5和新体制雷达辐射源目标行为意图推理模块6;其中,所述脉间信息特征参数提取模块1用于根据已知雷达辐射源目标的功能及对应的信号特性,分别提取各雷达辐射源的脉间信息特征参数,作为训练样本数据。
12.具体地,所述脉间信息特征参数包括脉冲重复频率、脉冲幅度、数据率、天线扫描方式。
13.所述训练样本聚类模块2用于采用粗糙k-均值分类器对训练样本数据首先进行k-均值聚类,确定训练样本数据中的聚类个数k,将训练样本数据分成k个聚类,计算出每个聚类中的初始聚类中心;在k-均值聚类中引入上近似样本密度和下近似样本密度,根据初始聚类中心对每个聚类中的训练样本数据再次进行粗糙k-均值聚类,获得每个聚类中的新聚类中心。
14.具体地,所述初始聚类中心通过下式计算式中,xk为k个聚类,uk为每个聚类xk中包含的训练样本集合,t
ok
为每个聚类xk中的初始聚类中心,k=0,1,2,
…
,k-1。
15.所述新聚类中心通过下式计算式中,tk为每个聚类xk中的新聚类中心,ω
upper
(k)为上近似的权值系数,ω
lower
(k)为下近似的权值系数,为每个聚类xk中的上近似样本密度,a(xk)为每个聚类xk中的下近似样本密度,x为单个训练样本数据。
16.所述新聚类中心的计算公式中x∈a(xk)需满足的条件为,若存在(k,k1),使得
则x∈且x∈,式中,d(x, t
ok )表示单个训练样本数据x与第k个聚类的初始聚类中心t
ok
之间的距离,d(x, t
ok1
)表示单个训练样本数据x与第k1个聚类的初始聚类中心t
ok1
之间的距离,t表示区分每个聚类中的上近似样本密度和下近似样本密度a(xk)的第二阈值。
17.所述新聚类中心的计算公式中x∈a(xk)需满足的条件为,对于任何(k,k1),若则x∈a(xk);式中,d(x, t
ok )表示单个训练样本数据x与第k个聚类的初始聚类中心τ
ok
之间的距离,d(x, t
ok1
)表示单个训练样本数据x与第k1个聚类的初始聚类中心τ
ok1
之间的距离,t表示区分每个聚类中的上近似样本密度和下近似样本密度a(xk)的第二阈值。
18.所述第二阈值t的取值范围通过以下步骤确定,步骤一,计算所有训练样本数据到k个聚类xk中的初始聚类中心t
ok
的距离,获得具有k行的距离矩阵,步骤二,计算距离矩阵中每行的最小值;步骤三,利用距离矩阵中每行的最小值,计算获得差值矩阵;步骤四,在差值矩阵中寻找每行的非0最小值,获得k个非0最小值;步骤五,将获得的k个非0最小值中的最小值选取为第二阈值t。
19.所述新聚类中心的计算公式中的上近似的权值系数ω
upper
(k)和下近似的权值系数ω
lower
(k)通过下式计算式中,ω
upper
(k)为上近似的权值系数,ω
lower
(k)为下近似的权值系数,为每个聚类xk中的上近似样本密度,a(xk)为每个聚类xk中的下近似样本密度。
20.本发明将上、下近似的概念引入到k-均值聚类中,形成粗糙k-均值聚类算法,并通过对训练样本进行加权,增加孤立点对初始聚类中心的影响,有效地解决噪声以及干扰的
影响问题,提高了聚类准确率。
21.所述训练样本分区模块3用于采用粗糙k-均值分类器在每个聚类中,以新聚类中心为球心,选取第一阈值rk作为半径,对每个聚类进行初次分区,若聚类中的训练样本数据到新聚类中心的距离大于或等于第一阈值rk,则该训练样本数据属于拒绝区;选取比例系数λ,且0<λ<1,若聚类中的训练样本到新聚类中心的距离小于λrk,则该训练样本数据属于线性可分的确定区,若聚类中的训练样本数据到新聚类中心的距离大于λrk且小于rk,则该训练样本数据属于线性不可分的不确定区。
22.具体地,每个聚类xk中的所述比例系数λ为确定区半径λrk与不确定区半径rk的比值,且λ∈【0.7,0.9】。
23.每个聚类xk中的所述不确定区的训练样本集合为式中,εk为确定区半径,rk为不确定区半径,dk(x)为第k个聚类中的训练样本数据x到新聚类中心tk的距离。
24.当聚类完成后,形成k个聚类xk,在特征空间中,聚类xk是以新聚类中心tk为球心,以不确定区半径rk为半径的超球体,维数由特征选择的结果确定,属于该聚类的所有训练样本都处于此超球体内部。每个聚类包含2个区域,即确定区和不确定区。
25.所述训练样本学习模块4用于采用粗糙k-均值分类器对确定区的训练样本进行训练学习,采用svm分类器对不确定区的训练样本进行训练学习。
26.所述新体制雷达辐射源目标功能识别模块5用于将未知的新体制雷达信号输入到基于粗糙k-均值分类器与svm联合分类器,通过粗糙k-均值分类器识别线性可分的雷达信号的功能,筛选线性不可分的雷达信号进入不确定区,并通过svm分类器对不确定区的雷达信号进行功能识别,最终分析出新体制雷达随着观测时间变化而呈现出的状态变化。
27.输入样本会根据到各个聚类中心的距离,分配到距离最近的聚类中。若某一样本距离新聚类中心tk最近,然而没有进入训练过程中形成的超球体内部,即该输入样本到tk的距离大于rk,该输入样本没有得到训练样本支持,即该输入样本不属于识别的类别,该输入样本将被线性分类器拒绝,进入下一级分类器进行识别。不确定区的输入样本处在聚类的外围,距离新聚类中心较远,容易收到噪声的影响。
28.本实施例以岛礁攻防为测试背景,应用电磁频谱战信号级仿真系统为验证平台,并根据实际地形掩蔽、气象影响等因素生成仿真试验环境,对新体制雷达辐射源目标功能认知准确率进行测试,如图2所示,由内向外的曲线分别表示海拔高度为100m、500m、1000m、3000m、5000m、8000m、10000m的组网雷达合成威力曲线。
29.仿真生成10部雷达辐射源目标用于测试,其中雷达辐射源目标t9为多功能雷达,具有导航、搜索、跟踪、火控等雷达工作模式,13种雷达信号形式如表1所示:
上表1中,t1~t8、t10雷达辐射源目标信息已知,t9导航工作模式信息已知,搜索、跟踪、火控工作模式信息为未知。
30.在相同信噪比条件下,根据已知雷达辐射目标t1、t2、t4、t5、t7、t8生成50000组测试样本,对新体制雷达辐射源目标功能认知准确率进行测试,认知准确率如图3所示。由图3可知,在0db到15db信噪比范围内,已知雷达辐射源目标功能的认知准确率≥90%。
31.在15db信噪比条件下,已知雷达辐射源目标功能的认知结果如表2所示。
32.所述新体制雷达辐射源目标行为意图推理模块6用于输出电磁目标行为意图表征模型(q, vs, c, f),其中,q表示功能/状态集合,q=(s0, s1, ..., sn);vs表示功能/状态确
认向量,v
s=
【v0,v1,...,vn】,vn表示功能/状态s
n 重复出现并得到确认;c表示功能/状态转换确认矩阵,它的元素c
ij
的值表示si→
sj功能/状态转换是否经过多次检测而确认;f表示功能/状态转换次数统计矩阵,矩阵的元素f
ij
代表在观测时间内发生si→
sj功能/状态转换的次数。通过电磁目标行为意图表征模型挖掘电磁辐射源目标行为意图与电磁信号之间的内在联系。
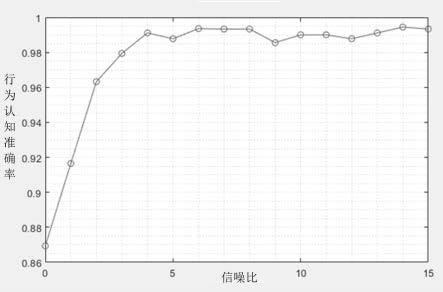
33.本项目在0db到15db信噪比范围内,对雷达辐射源目标t9的“瞄准”(搜索-跟踪-火控)行为进行认知,并对行为意图的认知准确率进行测试。
34.图4所示为雷达辐射源目标t9“瞄准”行为的雷达工作状态转换图,其中,实线表示雷达对于行为有效的功能转换,虚线表示对于行为无效的功能转换。雷达辐射源目标t9“瞄准行为”电磁目标行为意图表征模型(q, vs, c, f)描述为其中,状态转换确认矩阵c中的
“‑”
表示不关注,“1”表示该状态转换已经确认,“0”表示以出现该状态转移但未得到验证,
“‑
1”表示未发生该状态转移。一个可能的状态转换次数统计矩阵如下所示:在0db到15db信噪比范围内雷达辐射源目标t9“瞄准”行为认知准确率如图5所示。
35.通过上述仿真实验验证,本发明提出的新体制雷达辐射源目标的行为意图认知系统能够在0db以上的信噪比条件下,有效地对雷达辐射源目标t9“瞄准”行为进行认知。
36.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。