技术特征:
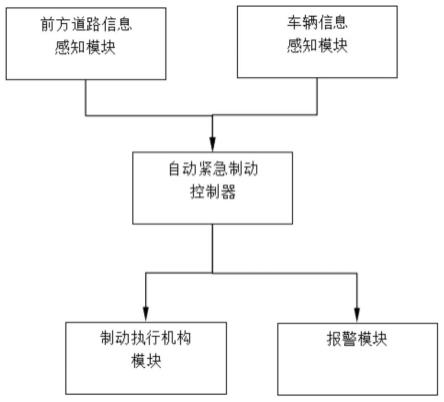
1.一种自动紧急制动控制系统,其特征是,包括:前方道路信息感知模块、车辆信息感知模块、自动紧急制动控制器、报警模块和制动执行机构模块;所述前方道路信息感知模块用于在车辆行驶过程中,获取车辆的前方道路信息,并将所述前方道路信息发送至所述自动紧急制动控制器;所述前方道路信息包括前方障碍物距离所述车辆的相对距离、前方障碍物与所述车辆的相对速度;所述车辆信息感知模块,用于在车辆行驶过程中,获取车辆信息,并将所述车辆信息发送至所述自动紧急制动控制器;所述车辆信息包括车辆档位、车速和方向盘实际转角;所述自动紧急制动控制器,用于在车辆行驶过程中,接收车辆的前方道路信息和车辆信息,根据所述前方道路信息和车辆信息进行逻辑判断,输出所述车辆对应的制动减速度,发送包含制动减速度的紧急制动执行指令至所述制动执行机构模块,并发送报警信号至所述报警模块;所述报警模块,用于根据所述报警信号发出警报;所述制动执行机构模块,用于接收紧急制动执行指令,根据紧急制动执行指令中的制动减速度执行相应减速度的制动减速。2.如权利要求1所述的一种自动紧急制动控制系统,其特征是,所述前方道路信息感知模块包括前视摄像头和毫米波雷达,所述前视摄像头以镜头所在位置为坐标原点,将车辆行驶方向作为x轴正方向,垂直于x轴的逆时针方向为y轴的正方向,建立直角坐标系;在该直角坐标系的基础上,根据前视摄像头实时获取的车辆前方道路图像,结合所述毫米波雷达输出的测距信息,分别计算前方障碍物距离所述车辆的相对距离和前方障碍物与所述车辆的相对速度。3.如权利要求2所述的一种自动紧急制动控制系统,其特征是,所述前方障碍物距离所述车辆的相对距离,是指前方障碍物相对于以前视摄像头为原点的x方向上的距离;所述前方障碍物与所述车辆的相对速度,是指前方障碍物相对于以前视摄像头为原点的x方向上的速度。4.如权利要求1所述的一种自动紧急制动控制系统,其特征是,所述自动紧急制动控制器进行逻辑判断,具体为:根据车辆信息,判断是否启动自动紧急制动控制:当车辆档位为d档且车速>0且方向盘实际转角<30
°
时,启动自动紧急制动控制,否则,不启动自动紧急制动控制;若启动自动紧急制动控制,则根据前方障碍物距离所述车辆的相对距离和前方障碍物与所述车辆的相对速度,计算得到所述车辆与前方障碍物发生碰撞所需的时间;根据所述车辆的当前车速,确定预设碰撞时间阈值;所述预设碰撞时间阈值和车速成正比;比较碰撞时间和预设碰撞时间阈值,当碰撞时间>预设碰撞时间阈值时,不进行制动操作;当碰撞时间≤预设碰撞时间阈值时,进行制动操作。5.如权利要求4所述的一种自动紧急制动控制系统,其特征是,当检测到碰撞时间≤预设碰撞时间阈值时,发出报警信息,同时开始计时,若在设定时间段内始终检测到碰撞时间≤预设碰撞时间阈值,则发出紧急制动执行指令;所述紧急制动执行指令包括执行紧急制动预设的制动减速度。6.如权利要求5所述的一种自动紧急制动控制系统,其特征是,所述制动执行机构模块
执行紧急制动的过程中,当所述自动紧急制动控制器检测到车辆在设定时间段内持续满足停止紧急制动的条件时,则发出停止紧急制动执行指令;所述制动执行机构模块接收停止紧急制动执行指令,释放制动力,停止自动制动。7.如权利要求6所述的一种自动紧急制动控制系统,其特征是,停止紧急制动的满足条件为车辆的车速<1km/h或预设时间>预设碰撞时间阈值或预设碰撞时间阈值>4s。8.如权利要求1所述的一种自动紧急制动控制系统,其特征是,还包括自检模块,用于检测所述自动紧急制动控制系统的各模块是否正常运行,将自检信息发送至所述自动紧急制动控制器。9.一种自动紧急制动控制方法,其特征是,包括:车辆启动后,自动紧急制动控制系统上电自检,若检测无故障,则自动紧急制动控制系统进入待机状态;打开自动紧急制动控制系统开关,使自动紧急制动控制系统进入使能状态;获取车辆的前方道路信息和车辆信息;所述前方道路信息包括:前方障碍物距离所述车辆的相对距离、前方障碍物与所述车辆的相对速度,所述车辆信息包括:车辆档位、车速和方向盘实际转角;根据所述前方道路信息和车辆信息进行逻辑判断,根据逻辑判断结果进行相应的自动紧急制动操作。10.如权利要求9所述的一种自动紧急制动控制方法,其特征是,根据所述前方道路信息和车辆信息进行逻辑判断,根据逻辑判断结果进行相应的自动紧急制动操作,具体为:根据车辆信息,判断是否启动自动紧急制动控制:当车辆档位为d档且车速>0且方向盘实际转角<30
°
时,启动自动紧急制动控制,否则,不启动自动紧急制动控制;若启动自动紧急制动控制,则根据前方障碍物距离所述车辆的相对距离和前方障碍物与所述车辆的相对速度,计算得到所述车辆与前方障碍物发生碰撞所需的时间;根据所述车辆的当前车速,确定预设碰撞时间阈值;所述预设碰撞时间阈值和车速成正比;比较碰撞时间和预设碰撞时间阈值,当碰撞时间>预设碰撞时间阈值时,不进行制动操作;当碰撞时间≤预设碰撞时间阈值时,发出报警信息,同时开始计时,若在设定时间段内始终检测到碰撞时间≤预设碰撞时间阈值,则以预设的制动减速度自动执行紧急制动。
技术总结
本发明公开了一种自动紧急制动控制系统,包括:前方道路信息感知模块、车辆信息感知模块、自动紧急制动控制器、报警模块和制动执行机构模块;自动紧急制动控制器在车辆行驶过程中,接收感知模块发送的车辆前方道路信息和车辆信息,计算碰撞时间,并根据车速确定预设碰撞时间阈值,比较碰撞时间和预设碰撞时间阈值,根据比较结果发出紧急制动执行指令,制动执行机构模块接收指令并执行相应的自动紧急制动操作。本发明通过比较碰撞时间和预设碰撞时间阈值进行逻辑判断,实现不同车速的分级刹车控制,在保证行车安全性的同时,大大提高乘客乘车的舒适性。客乘车的舒适性。客乘车的舒适性。
技术研发人员:囤金军 陈振国 赵红光 侯进森 朱岩朋 李振洋 杨政栋
受保护的技术使用者:中通客车股份有限公司
技术研发日:2022.07.18
技术公布日:2022/10/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。