1.本技术涉及水处理技术领域,尤其涉及清洗设备的控制方法及相关装置。
背景技术:
2.近年来随着物质生活的富足,食品行业的迅速发展,餐饮业所排放的食物废料及其废水已经成为当前急需解决的重要问题。加之家用厨余垃圾粉碎机的普及,小区管路排出的生活污水富营养化,直接排放将严重影响排污点的排放指标。此类废水中cod可高达数万mg/lh,含油量非常高。此前一直未被重视,未被处理就直接排放,进而造成水体污染。
3.专利cn110422913a公开了一种电气浮结合电絮凝污水处理工艺;包括电絮凝和电气浮,污水经过电絮凝后进入电气浮进行处理;所述电絮凝包括以下步骤:(1)破键;(2)氧化还原;(3)絮凝沉淀;电气浮包括以下步骤:(1)经过电絮凝的废水电解时在正、负极板表面上产生气泡析出、并上浮;(2)气泡粘附水中杂质微粒及油类浮到水面后、由浮渣渠把上浮杂质微粒及油类引流到污泥槽内;(3)气浮水槽下层设置排泥管按设定时间排放部分沉淀污泥。然而,这种污水处理方式,污水经过电絮凝后直接进入电气浮处理工序,电极所对应的电气参数(频率、波形、占空比、幅值等)没有发生改变,电絮凝效果和电气浮效果较差。
4.因此,亟需提供一种清洗设备的控制方法及相关装置,以解决现有技术的问题。
技术实现要素:
5.本技术的目的在于提供清洗设备的控制方法及相关装置,通过交替循环地启用催化模式和发泡模式,提升对液体的净化效果。
6.本技术的目的采用以下技术方案实现:
7.第一方面,本技术提供了一种清洗设备的控制方法,用于对容器内的液体进行净化,所述清洗设备设置有电极模块,所述方法包括:
8.当所述清洗设备满足预设启动条件时,控制所述清洗设备交替循环地启用催化模式和发泡模式;
9.当所述清洗设备满足预设吸附条件时,控制所述清洗设备启用电泳模式;
10.其中,所述电极模块在所述催化模式、所述发泡模式和所述电泳模式下的电气参数各不相同;
11.在所述催化模式下,所述电极模块对所述液体进行电解,生成氧化水合物和预设气体,所述氧化水合物用于凝聚所述液体中的杂质颗粒以形成絮粒;
12.在所述发泡模式下,所述电极模块将所述预设气体从所述液体中分离,形成气泡,以使所述絮粒黏附于所述气泡,实现气浮分离;
13.在所述电泳模式下,所述电极模块利用螯合剂置换所述液体中的重金属离子形成沉淀,以使所述沉淀在电泳效应的作用下被吸附至所述电极模块表面。
14.该技术方案的有益效果在于:利用清洗设备对液体进行净化时,并不是按顺序过完一遍催化模式和发泡模式就结束,而是交替循环地启用催化模式和发泡模式这两种模式
(不同模式下,电极模块对应的电气参数不同),例如,可以在启用催化模式(电气参数例如是尖波、中频)1分钟后,启用发泡模式(电气参数例如是方波、低频),发泡模式持续2分钟后,再重复启用催化模式,如此循环往复,提升对液体的净化效果,(尤其针对流动的液体)在交替循环的“催化”和“发泡”过程下,可以充分地净化液体中的杂质颗粒(油脂、蛋白等),使杂质颗粒被上浮的气泡带走,直到清洗设备满足预设吸附条件,才结束这一“催化”和“发泡”交替循环的过程,此时,清洗设备自动启用电泳模式,利用螯合剂置换液体中的重金属离子形成沉淀,将沉淀吸附在电极模块表面,从而净化液体中的重金属离子。
15.相比于现有技术,本技术的清洗设备通过交替循环地启用催化模式和发泡模式(不断改变电极模块的电气参数),充分地净化液体中的杂质颗粒,通过启用电泳模式,吸附带有一定极性的沉淀,净化液体中的重金属离子,进一步提升对液体的净化效果。
16.在一些可选的实施例中,所述预设启动条件包括以下至少一种:
17.接收到用户启动清洗的操作;
18.当前时刻处于预设时刻范围;
19.所述预设吸附条件包括以下至少一种:
20.接收到用户停止清洗的操作;
21.所述氧化水合物的浓度不小于预设浓度阈值;
22.所述液体的气泡参数的参数值不小于第一预设阈值;
23.所述催化模式和所述发泡模式的工作时长不小于预设时长阈值;
24.所述催化模式和所述发泡模式交替循环的次数不小于预设次数阈值。
25.该技术方案的有益效果在于:预设启动条件包括以下至少一种:接收到用户启动清洗的操作;当前时刻处于预设时刻范围。
26.也就是说,可以通过用户手动控制清洗设备启动清洗,或者,可以定时控制清洗设备自动清洗,例如,下午3点~3点半、晚上9点~9点半自动启动清洗。
27.预设吸附条件可以是接收到用户停止清洗的操作,当用户手动控制清洗设备停止清洗时,清洗设备启用电泳模式,以吸附相应的沉淀;
28.预设吸附条件可以是氧化水合物的浓度不小于预设浓度阈值和/或气泡的气泡参数的参数值不小于第一预设阈值,当氧化水合物的浓度较高时,表明“催化”过程很充分,生成了大量的氧化水合物,充分凝聚了液体中的杂质颗粒;当气泡参数的参数值较高时,表明“发泡”过程很充分,产生了大量气泡,足以黏附大量的絮粒上浮,此时,清洗设备可以结束“催化”和“发泡”交替循环的过程,自动启用电泳模式。
29.预设吸附条件可以是催化模式和发泡模式的工作时长不小于预设时长阈值和/或催化模式和发泡模式交替循环的次数不小于预设次数阈值,当催化模式和发泡模式已经重复了多次,对应的工作时长相对较长时,表明“催化”和“发泡”已经充分完成,此时,清洗设备可以结束“催化”和“发泡”交替循环的过程,自动启用电泳模式。
30.在一些可选的实施例中,所述预设吸附条件包括:所述液体的气泡参数的参数值不小于第一预设阈值;
31.所述液体的气泡参数的参数值采用以下方式获取:
32.利用气泡检测模块获取所述液体的气泡参数的参数值;其中,所述气泡检测模块包括以下至少一种:光电传感器和超声波传感器。
33.该技术方案的有益效果在于:可以利用光电传感器和/或超声波传感器检测液体的气泡参数的参数值,通过这种非接触式的检测手段来监测液体的发泡情况,智能化程度较高。
34.在一些可选的实施例中,所述方法还包括:
35.利用视觉检测设备和光谱分析仪对所述液体进行检测,以获取所述液体对应的混合物成分;
36.基于所述混合物成分,获取所述液体对应的螯合剂的类型,以使所述清洗设备在所述电泳模式下采用对应类型的螯合剂。
37.该技术方案的有益效果在于:可以采用视觉检测设备和光谱分析仪(非接触式的检测手段)对液体进行检测,以获取液体对应的混合物成分,针对不同混合物成分的液体,可以选用不同类型的螯合剂,也就是说,清洗设备可以根据实际需要选择不同类型的螯合剂,针对不同混合物成分的液体,均能保证良好的置换效果,进一步提高净化液体的重金属离子的能力。
38.在一些可选的实施例中,所述方法还包括:
39.获取所述电极模块对应的沉淀参数的参数值,所述沉淀参数用于指示所述电极模块表面所吸附的沉淀的密集程度;
40.当所述沉淀参数的参数值不小于第二预设阈值时,向所述电极模块施加与所述电泳模式极性相反的电场,以使所述沉淀从所述电极模块表面脱落。
41.该技术方案的有益效果在于:随着电极模块吸附的沉淀(重金属杂质)的增多,会影响整个清洗设备的工作性能和使用寿命,因此,需要及时清理电极模块表面所吸附的沉淀。
42.当沉淀参数的参数值不小于第二预设阈值时,表明电极模块表面已经吸附了大量的沉淀,此时,可以向电极模块施加与电泳模式极性相反的电场,沉淀在相斥的电场作用下会自动从电极模块表面脱落,进而被流动的液体给冲走。
43.在一些可选的实施例中,所述电极模块包括电容式传感器、正电极栅板和负电极栅板;
44.所述获取所述电极模块对应的沉淀参数的参数值,包括:
45.利用所述电容式传感器获取所述正电极栅板和所述负电极栅板之间的电容量;
46.基于所述电容量,获取所述正电极栅板和所述负电极栅板对应的沉淀参数的参数值。
47.该技术方案的有益效果在于:电极模块可以包括电容式传感器、正电极栅板和负电极栅板,相比于平板形式的电极,栅板形式的电极不会阻碍液体的流动和气泡的上浮。
48.利用电容式传感器可以获取正电极栅板和负电极栅板之间的电容量,通过电容量获取对应的沉淀参数的参数值,通过这种非接触式的检测方式可以快速便捷地获取沉淀参数的参数值,提高检测效率。
49.在一些可选的实施例中,所述方法还包括:
50.当所述沉淀参数的参数值不大于第三预设阈值时,停止向所述电极模块施加与所述电泳模式极性相反的电场,所述第三预设阈值小于所述第二预设阈值。
51.该技术方案的有益效果在于:当沉淀参数的参数值不大于第三预设阈值时,表明
电极模块表面所吸附的沉淀很少,可以停止向电极模块施加与电泳模式极性相反的电场,降低能耗。
52.在一些可选的实施例中,所述清洗设备设置有驱动组件和涡轮叶片,所述方法还包括:
53.获取所述容器的进液口的流量;
54.当所述流量不大于预设流量阈值时,控制所述驱动组件驱动所述涡轮叶片,以使所述液体在所述涡轮叶片的带动下形成涡流,从而令所述液体和所述电极模块充分接触。
55.该技术方案的有益效果在于:清洗设备可以设置有涡轮叶片,当容器的进液口的流量很大时,液体本身的流动可以带动涡轮叶片转动,涡轮叶片进而带动液体形成涡流;当容器的进液口的流量很小时,可以利用驱动组件驱动涡轮叶片转动,涡轮叶片进而带动液体形成涡流;在涡流的旋转下,各处的液体可以与电极模块充分接触,从而进一步提升对液体的净化效果。
56.第二方面,本技术提供了一种清洗设备的控制装置,用于对容器内的液体进行净化,所述清洗设备设置有电极模块,所述装置包括:
57.催化发泡模块,用于当所述清洗设备满足预设启动条件时,控制所述清洗设备交替循环地启用催化模式和发泡模式;
58.电泳吸附模块,用于当所述清洗设备满足预设吸附条件时,控制所述清洗设备启用电泳模式;
59.其中,所述电极模块在所述催化模式、所述发泡模式和所述电泳模式下的电气参数各不相同;
60.在所述催化模式下,所述电极模块对所述液体进行电解,生成氧化水合物和预设气体,所述氧化水合物用于凝聚所述液体中的杂质颗粒以形成絮粒;
61.在所述发泡模式下,所述电极模块将所述预设气体从所述液体中分离,形成气泡,以使所述絮粒黏附于所述气泡,实现气浮分离;
62.在所述电泳模式下,所述电极模块利用螯合剂置换所述液体中的重金属离子形成沉淀,以使所述沉淀在电泳效应的作用下被吸附至所述电极模块表面。
63.在一些可选的实施例中,所述预设启动条件包括以下至少一种:
64.接收到用户启动清洗的操作;
65.当前时刻处于预设时刻范围;
66.所述预设吸附条件包括以下至少一种:
67.接收到用户停止清洗的操作;
68.所述氧化水合物的浓度不小于预设浓度阈值;
69.所述液体的气泡参数的参数值不小于第一预设阈值;
70.所述催化模式和所述发泡模式的工作时长不小于预设时长阈值;
71.所述催化模式和所述发泡模式交替循环的次数不小于预设次数阈值。
72.在一些可选的实施例中,所述预设吸附条件包括:所述液体的气泡参数的参数值不小于第一预设阈值;
73.所述液体的气泡参数的参数值采用以下方式获取:
74.利用气泡检测模块获取所述液体的气泡参数的参数值;其中,所述气泡检测模块
包括以下至少一种:光电传感器和超声波传感器。
75.在一些可选的实施例中,所述装置还包括:
76.成分检测模块,用于利用视觉检测设备和光谱分析仪对所述液体进行检测,以获取所述液体对应的混合物成分;
77.螯合剂选型模块,用于基于所述混合物成分,获取所述液体对应的螯合剂的类型,以使所述清洗设备在所述电泳模式下采用对应类型的螯合剂。
78.在一些可选的实施例中,所述装置还包括:
79.沉淀检测模块,用于获取所述电极模块对应的沉淀参数的参数值,所述沉淀参数用于指示所述电极模块表面所吸附的沉淀的密集程度;
80.反向电场模块,用于当所述沉淀参数的参数值不小于第二预设阈值时,向所述电极模块施加与所述电泳模式极性相反的电场,以使所述沉淀从所述电极模块表面脱落。
81.在一些可选的实施例中,所述电极模块包括电容式传感器、正电极栅板和负电极栅板;
82.所述沉淀检测模块包括:
83.电容量检测单元,用于利用所述电容式传感器获取所述正电极栅板和所述负电极栅板之间的电容量;
84.沉淀计算单元,用于基于所述电容量,获取所述正电极栅板和所述负电极栅板对应的沉淀参数的参数值。
85.在一些可选的实施例中,所述装置还包括:
86.电场停止模块,用于当所述沉淀参数的参数值不大于第三预设阈值时,停止向所述电极模块施加与所述电泳模式极性相反的电场,所述第三预设阈值小于所述第二预设阈值。
87.在一些可选的实施例中,所述清洗设备设置有驱动组件和涡轮叶片,所述装置还包括:
88.流量获取模块,用于获取所述容器的进液口的流量;
89.涡轮驱动模块,用于当所述流量不大于预设流量阈值时,控制所述驱动组件驱动所述涡轮叶片,以使所述液体在所述涡轮叶片的带动下形成涡流,从而令所述液体和所述电极模块充分接触。
90.第三方面,本技术提供了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一项方法的步骤。
91.第四方面,本技术提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项方法的步骤。
附图说明
92.下面结合附图和实施例对本技术进一步说明。
93.图1是本技术实施例提供的一种清洗设备的控制方法的流程示意图。
94.图2是本技术实施例提供的一种螯合剂选型的流程示意图。
95.图3是本技术实施例提供的一种清理沉淀的流程示意图。
96.图4是本技术实施例提供的一种清洗设备的控制装置的结构框图。
97.图5是本技术实施例提供的另一种清洗设备的控制装置的结构框图。
98.图6是本技术实施例提供的再一种清洗设备的控制装置的结构框图。
99.图7是本技术实施例提供的一种电子设备的结构框图。
100.图8是本技术实施例提供的一种程序产品的结构框图。
具体实施方式
101.下面,结合附图以及具体实施方式,对本技术做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
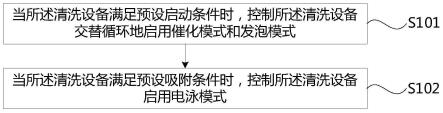
102.参见图1,图1是本技术实施例提供的一种清洗设备的控制方法的流程示意图。
103.所述清洗设备设置有电极模块,所述方法用于对容器内的液体进行净化,所述方法包括:
104.步骤s101:当所述清洗设备满足预设启动条件时,控制所述清洗设备交替循环地启用催化模式和发泡模式;
105.步骤s102:当所述清洗设备满足预设吸附条件时,控制所述清洗设备启用电泳模式;
106.其中,所述电极模块在所述催化模式、所述发泡模式和所述电泳模式下的电气参数各不相同;
107.在所述催化模式下,所述电极模块对所述液体进行电解,生成氧化水合物和预设气体,所述氧化水合物用于凝聚所述液体中的杂质颗粒以形成絮粒;
108.在所述发泡模式下,所述电极模块将所述预设气体从所述液体中分离,形成气泡,以使所述絮粒黏附于所述气泡,实现气浮分离;
109.在所述电泳模式下,所述电极模块利用螯合剂置换所述液体中的重金属离子形成沉淀,以使所述沉淀在电泳效应的作用下被吸附至所述电极模块表面。
110.由此,利用清洗设备对液体进行净化时,并不是按顺序过完一遍催化模式和发泡模式就结束,而是交替循环地启用催化模式和发泡模式这两种模式(不同模式下,电极模块对应的电气参数不同),例如,可以在启用催化模式(电气参数例如是尖波、中频)1分钟后,启用发泡模式(电气参数例如是方波、低频),发泡模式持续2分钟后,再重复启用催化模式,如此循环往复,提升对液体的净化效果,(尤其针对流动的液体)在交替循环的“催化”和“发泡”过程下,可以充分地净化液体中的杂质颗粒(油脂、蛋白等),使杂质颗粒被上浮的气泡带走,直到清洗设备满足预设吸附条件,才结束这一“催化”和“发泡”交替循环的过程,此时,清洗设备自动启用电泳模式,利用螯合剂置换液体中的重金属离子形成沉淀,将沉淀吸附在电极模块表面,从而净化液体中的重金属离子。
111.相比于现有技术,本技术的清洗设备通过交替循环地启用催化模式和发泡模式(不断改变电极模块的电气参数),充分地净化液体中的杂质颗粒,通过启用电泳模式,吸附带有一定极性的沉淀,净化液体中的重金属离子,进一步提升对液体的净化效果。
112.本技术对容器和容器不作限定,容器例如可以是马桶水箱、厨房水槽、厨房水箱、眼镜清洗设备的水槽、洗碗机的水槽、清洗机器人的水箱、医用器械的清洗篮或者工业废水
池,容器内的液体例如是厨余污水、家用自来水、医疗废液或者工业废水。
113.相应地,该清洗设备(或者说清洁设备)可以用于应用于家居、机械、光学、电子、轻工、纺织、化工、航空航天、船舶、原子能以及医疗医药等行业,典型应用场景例如可以是卫浴空间或者厨房,例如可以是马桶清洗设备、水槽清洗设备、工业清洗设备、眼镜清洗设备、医疗消毒清洗设备等。
114.清洗设备除了可以对液体本身进行净化消杀,还可以对浸泡于液体内的物品的表面进行净化消杀,例如可以对厨房水槽里的蔬菜水果进行净化消杀,或者,对洗碗机水槽里的碗筷进行净化消杀,或者,可以对清洗机器人的滚筒进行净化消杀(清洗机器人可以是集吸尘、洗地功能于一体的洗地机,包括水箱、滚筒和吸气装置)。
115.在一些实施方式中,本技术的清洗设备可以结合清洗耗材对医疗废液进行初步的杀菌消毒(医疗废液未经消杀不能直接排放),经过杀菌消毒的医疗废液可以直接进入污水循环系统进行后续的处理。
116.在另一些实施方式中,本技术的清洗设备可以对穿戴式医疗用品进行消杀,例如人造软骨、体温贴、心电贴(不同病人共用,消杀十分必要)、种植牙、假牙等。除此之外,还可以对眼镜、瞳膜眼镜、隐形眼镜等防水性能较佳的器件进行消杀。经过消杀后,可以将相应的固液产物排放至垃圾排放系统或垃圾循环系统。
117.电极模块可以包括至少一组正电极栅板和负电极栅板,本技术对正电极栅板和负电极栅板的材质不作限定,正电极栅板(作为发生还原反应的阴极)的材质可以采用石墨或者ti(金属钛),负电极栅板(作为发生氧化反应的阳极)的材质可以采用钛合金,例如ti/ruo
2-iro
2-sno2(钛基二氧化钌-二氧化铱-二氧化锡)、ti/ruo
2-tio
2-iro2(钛基二氧化钌-二氧化钛-二氧化铱)、ti/ruo
2-tio
2-sno2(钛基二氧化钌-二氧化钛-二氧化锡)、ti/ruo
2-tio
2-sno
2-iro
2-co2o3(钛基二氧化钌-二氧化钛-二氧化锡-二氧化铱-三氧化二钴)。
118.本技术对氧化水合物不作限定,氧化水合物的成分与液体的混合物成分相关,当液体包含(微量的)nacl(氯化钠)成分时,氧化水合物的成分可以包括羟基自由基、nahco3(碳酸氢钠)、次氯酸等,相应地,可以形成羟基氧化水和次氯酸水合物。
119.本技术对预设气体不作限定,预设气体可以包括氢气和氧气,还可以包括液体中本身含有的溶解气体成分,在发泡模式下,液体中本身含有的溶解气体成分从稳定态分离,与氢气和氧气组合,形成气泡。
120.金属原子或离子与含有两个或两个以上配位原子的配位体作用,生成具有环状结构的络合物,该络合物叫做螯合物。能生成螯合物的这种配体物质叫螯合剂,也称为络合剂。螯合剂在水污染化学、分析化学、有机和生化等方面的应用十分广泛,其用途包括水中金属离子的置换、水的软化、分级沉淀、纤维染色、清洗金属、浮选、杀菌、蛋白质的水解与合成以及稳定维生素等。
121.本技术对螯合剂的种类不作限定,螯合剂例如可以是氨羧络合剂(包括氨基三乙酸即nta、乙二胺四乙酸即edta等)、双硫腙、8-羟基喹啉、邻菲咯啉(c12h8n2)、酒石酸钾钠、柠檬酸铵及无机螯合剂多磷酸盐等。螯合剂对各种金属离子具有较高的选择性和灵敏度,所生成的金属螯合物比同类的络合物具有更好的稳定性。
122.在一些实施方式中,所述螯合剂可以是有机轻金属螯合剂凝胶(食品级缓释反应活性凝胶)。
123.电极模块的(直流)电气参数可以包括以下至少一种:波形、频率、占空比和幅值。
124.在一具体应用中,催化模式下,电极模块的电气参数为:直流、尖波、2khz(中频)、占空比100%(持续通电)、电压幅值3~5v;
125.发泡模式下,电极模块的电气参数为:直流、方波、4hz~7khz(低频)、占空比≥30%、电压幅值≥10v;
126.电泳模式下,电极模块的电气参数为:直流、占空比100%(持续通电)、电压幅值≥4v(频率、波形不限)。
127.在一些实施方式中,可以采用预先设置(与时间相关)的规则交替循环地启用催化模式和发泡模式(二者的时序相交替),例如,启用催化模式的时长达到第一预设时长后,切换至发泡模式,启用发泡模式的时长达到第二预设时长后,再次切换至催化模式,如此循环往复。
128.本技术对第一预设时长和第二预设时长不作限定,第一预设时长例如可以是15~60秒,第二预设时长例如可以是5~120秒。
129.在另一些实施方式中,可以根据实际需要,监测氧化水合物的浓度和液体的气泡参数的参数值,在催化模式下,当检测到液体的气泡参数的参数值小于第四阈值时,控制所述清洗设备切换至发泡模式;在发泡模式下,当检测到氧化水合物的浓度小于第五预设阈值时,控制所述清洗设备切换至催化模式。
130.气泡参数可以包括以下任意一种:气泡的数量、气泡的尺寸和气泡的生成速率。
131.本技术对第四阈值和第五阈值不作限定,气泡参数可以是气泡的数量,第四阈值例如是100、500或者1000个。气泡参数还可以是单位体积内气泡的数量,
132.第五阈值例如是1mg/l、2mg/l或者5mg/l。
133.在一些可选的实施例中,所述预设启动条件包括以下至少一种:
134.接收到用户启动清洗的操作;
135.当前时刻处于预设时刻范围;
136.所述预设吸附条件包括以下至少一种:
137.接收到用户停止清洗的操作;
138.所述氧化水合物的浓度不小于预设浓度阈值;
139.所述液体的气泡参数的参数值不小于第一预设阈值;
140.所述催化模式和所述发泡模式的工作时长不小于预设时长阈值;
141.所述催化模式和所述发泡模式交替循环的次数不小于预设次数阈值。
142.由此,预设启动条件包括以下至少一种:接收到用户启动清洗的操作;当前时刻处于预设时刻范围。
143.也就是说,可以通过用户手动控制清洗设备启动清洗,或者,可以定时控制清洗设备自动清洗,例如,下午3点~3点半、晚上9点~9点半自动启动清洗。
144.预设吸附条件可以是接收到用户停止清洗的操作,当用户手动控制清洗设备停止清洗时,清洗设备启用电泳模式,以吸附相应的沉淀;
145.预设吸附条件可以是氧化水合物的浓度不小于预设浓度阈值和/或气泡的气泡参数的参数值不小于第一预设阈值,当氧化水合物的浓度较高时,表明“催化”过程很充分,生成了大量的氧化水合物,充分凝聚了液体中的杂质颗粒;当气泡参数的参数值较高时,表明“发泡”过程很充分,产生了大量气泡,足以黏附大量的絮粒上浮,此时,清洗设备可以结束“催化”和“发泡”交替循环的过程,自动启用电泳模式。
146.预设吸附条件可以是催化模式和发泡模式的工作时长不小于预设时长阈值和/或催化模式和发泡模式交替循环的次数不小于预设次数阈值,当催化模式和发泡模式已经重复了多次,对应的工作时长相对较长时,表明“催化”和“发泡”已经充分完成,此时,清洗设备可以结束“催化”和“发泡”交替循环的过程,自动启用电泳模式。
147.本技术对预设时刻范围、预设浓度阈值、第一预设阈值、预设时长阈值和预设次数阈值不作限定。
148.预设时刻范围可以是下午3点~3点半、晚上9点~9点半或者凌晨12点~凌晨12点半。
149.预设浓度阈值可以是10mg/l、20mg/l或者50mg/l。
150.气泡参数可以是气泡的生成速率,对应地,第一预设阈值例如是10个/秒、20个/秒或者30个/秒。
151.催化模式和发泡模式的工作时长可以是催化模式与发泡模式二者叠加的工作时长,例如,清洗设备在催化模式下工作了1小时,在发泡模式下工作了1.5小时,则催化模式和发泡模式的工作时长为2.5小时。对应地,预设时长阈值例如是3小时、4小时或者5小时。
152.催化模式和发泡模式交替循环的次数可以是启用催化模式的次数与启用发泡模式的次数之和,例如,启用催化模式的次数为25次,启用发泡模式的次数为24次,催化模式和发泡模式交替循环的次数为49次。对应地,预设次数阈值例如是30次、40次或者50次。
153.在一些可选的实施例中,所述预设吸附条件包括:所述液体的气泡参数的参数值不小于第一预设阈值;
154.所述液体的气泡参数的参数值采用以下方式获取:
155.利用气泡检测模块获取所述液体的气泡参数的参数值;其中,所述气泡检测模块包括以下至少一种:光电传感器和超声波传感器。
156.由此,可以利用光电传感器和/或超声波传感器检测液体的气泡参数的参数值,通过这种非接触式的检测手段来监测液体的发泡情况,智能化程度较高。
157.光电传感器是将光信号转换为电信号的一种器件。光电传感器可以包括光电倍增管、光敏电阻、光敏二极管、光敏三极管等,根据伏安特性可以得到输出电压与光照强度的关系。当液体中有气泡析出时,由于光的反射和不同介质对光的吸收不同,光电传感器接收光强度发生变化,从而引起输出电压的变化,由此感测液体的气泡参数的参数值。
158.超声波传感器是将超声波信号转换成其它能量信号(通常是电信号)的传感器。超声在均匀的介质中直线传播,但到达界面或者不同介质时会发生反射和折射,并服从与几何光学类似的反射和折射定律。超声波传感器在液体和固体中的衰减很小穿透能力强,具有明显的界面反射和折射,同时具有超声的高频特性,便于对实际脉冲和超声波脉冲计数,以感测液体的气泡参数的参数值。超声波传感器灵敏度高、可靠性好,能检测出小间隙的连续气泡。
159.参见图2,图2是本技术实施例提供的一种螯合剂选型的流程示意图。
160.在一些可选的实施例中,所述方法还包括:
161.步骤s201:利用视觉检测设备和光谱分析仪对所述液体进行检测,以获取所述液
体对应的混合物成分;
162.步骤s202:基于所述混合物成分,获取所述液体对应的螯合剂的类型,以使所述清洗设备在所述电泳模式下采用对应类型的螯合剂。
163.由此,可以采用视觉检测设备和光谱分析仪(非接触式的检测手段)对液体进行检测,以获取液体对应的混合物成分,针对不同混合物成分的液体,可以选用不同类型的螯合剂,也就是说,清洗设备可以根据实际需要选择不同类型的螯合剂,针对不同混合物成分的液体,均能保证良好的置换效果,进一步提高净化液体的重金属离子的能力。
164.在一些实施方式中,所述液体对应的混合物成分可以采用以下方式获取:
165.利用所述视觉检测设备获取所述液体对应的图像信息,利用所述光谱分析仪获取所述液体对应的光谱信息;
166.将所述液体对应的图像信息和光谱信息输入成分检测模型,获取所述液体对应的混合物成分。
167.其中,所述成分检测模型的训练过程如下:
168.获取训练集,所述训练集包括多个训练数据,每个所述训练数据包括一个样本对象的图像信息、光谱信息以及所述样本对象的混合物成分的标注数据;
169.针对所述训练集中的每个训练数据,执行以下处理:
170.将所述训练数据中的样本对象的图像信息和光谱信息输入预设的深度学习模型,得到所述样本对象的混合物成分的预测数据;
171.基于所述样本对象的混合物成分的预测数据和标注数据,对所述深度学习模型的模型参数进行更新;
172.检测是否满足预设的训练结束条件;如果是,则将训练出的深度学习模型作为所述成分检测模型;如果否,则利用下一个所述训练数据继续训练所述深度学习模型。
173.本技术对成分检测模型的训练过程不作限定,其例如可以采用上述监督学习的训练方式,或者可以采用半监督学习的训练方式,或者可以采用无监督学习的训练方式。
174.本技术对预设的训练结束条件不作限定,其例如可以是训练次数达到预设次数(预设次数例如是1次、3次、10次、100次、1000次、10000次等),或者可以是训练集中的训练数据都完成一次或多次训练,或者可以是本次训练得到的总损失值不大于预设损失值。
175.利用多个样本对象的图像信息、光谱信息及其对应的混合物成分的标注数据对预设的深度学习模型进行训练,得到成分检测模型,成分检测模型可以由大量的训练数据训练得到,能够针对多种图像信息、光谱信息预测得到相应的混合物成分,适用范围广,智能化水平高。通过设计,建立适量的神经元计算节点和多层运算层次结构,选择合适的输入层和输出层,就可以得到预设的深度学习模型,通过该预设的深度学习模型的学习和调优,建立起从输入到输出的函数关系,虽然不能100%找到输入与输出的函数关系,但是可以尽可能地逼近现实的关联关系,由此训练得到的成分检测模型,可以实现对图像信息和光谱信息的分析处理,且分析结果可靠性高。
176.参见图3,图3是本技术实施例提供的一种清理沉淀的流程示意图。
177.在一些可选的实施例中,所述方法还包括:
178.步骤s301:获取所述电极模块对应的沉淀参数的参数值,所述沉淀参数用于指示所述电极模块表面所吸附的沉淀的密集程度;
179.步骤s302:当所述沉淀参数的参数值不小于第二预设阈值时,向所述电极模块施加与所述电泳模式极性相反的电场,以使所述沉淀从所述电极模块表面脱落。
180.由此,随着电极模块吸附的沉淀(重金属杂质)的增多,会影响整个清洗设备的工作性能和使用寿命,因此,需要及时清理电极模块表面所吸附的沉淀。
181.当沉淀参数的参数值不小于第二预设阈值时,表明电极模块表面已经吸附了大量的沉淀,此时,可以向电极模块施加与电泳模式极性相反的电场,沉淀在相斥的电场作用下会自动从电极模块表面脱落,进而被流动的液体给冲走。
182.沉淀参数的参数值可以用中文、数字、字母和特殊符号中的一种或多种表示,在一具体应用中,沉淀参数的参数值例如可以用数字表示(20、30或者40),数值越高,电极模块表面所吸附的沉淀的密集程度越高。
183.本技术对第二预设阈值不作限定,第二预设阈值例如可以是30、50或者80。
184.在一些可选的实施例中,所述电极模块包括电容式传感器、正电极栅板和负电极栅板;
185.所述获取所述电极模块对应的沉淀参数的参数值,包括:
186.利用所述电容式传感器获取所述正电极栅板和所述负电极栅板之间的电容量;
187.基于所述电容量,获取所述正电极栅板和所述负电极栅板对应的沉淀参数的参数值。
188.由此,电极模块可以包括电容式传感器、正电极栅板和负电极栅板,相比于平板形式的电极,栅板形式的电极不会阻碍液体的流动和气泡的上浮。
189.利用电容式传感器可以获取正电极栅板和负电极栅板之间的电容量,通过电容量获取对应的沉淀参数的参数值,通过这种非接触式的检测方式可以快速便捷地获取沉淀参数的参数值,提高检测效率。
190.在一些实施方式中,所述基于所述电容量,获取所述正电极栅板和所述负电极栅板对应的沉淀参数的参数值,可以包括:
191.基于所述电容量以及预设对应关系,获取所述正电极栅板和所述负电极栅板对应的沉淀参数的参数值。
192.其中,预设对应关系可以是电容量和沉淀参数的参数值之间的对应关系,其可以是预先设置好的一种映射表。
193.在一具体应用中,根据参考配置映射表,可以得知,当电容量为100pf时,沉淀参数的参数值为20;当电容量为50pf时,沉淀参数的参数值为30。
194.在另一些实施方式中,所述基于所述电容量,获取所述正电极栅板和所述负电极栅板对应的沉淀参数的参数值,可以包括:
195.将所述电容量输入预设的沉淀参数计算公式,通过计算获取所述正电极栅板和所述负电极栅板对应的沉淀参数的参数值。
196.本技术对预设的沉淀参数计算公式不作限定,其例如是一元多项式或者多元多项式,又例如是线性多项式或者非线性多项式。利用该沉淀参数计算公式和自变量(所述正电极栅板和所述负电极栅板之间的电容量),计算得到因变量(所述正电极栅板和所述负电极栅板对应的沉淀参数的参数值)。基于计算公式的计算过程,所消耗的计算资源少,所耗费的计算时间短,计算效率较高。
197.在一些可选的实施例中,所述方法还包括:
198.当所述沉淀参数的参数值不大于第三预设阈值时,停止向所述电极模块施加与所述电泳模式极性相反的电场,所述第三预设阈值小于所述第二预设阈值。
199.由此,当沉淀参数的参数值不大于第三预设阈值时,表明电极模块表面所吸附的沉淀很少,可以停止向电极模块施加与电泳模式极性相反的电场,降低能耗。
200.本技术对第二预设阈值不作限定,第二预设阈值例如可以是5、10或者20。
201.在一些可选的实施例中,所述清洗设备设置有驱动组件和涡轮叶片,所述方法还包括:
202.获取所述容器的进液口的流量;
203.当所述流量不大于预设流量阈值时,控制所述驱动组件驱动所述涡轮叶片,以使所述液体在所述涡轮叶片的带动下形成涡流,从而令所述液体和所述电极模块充分接触。
204.由此,清洗设备可以设置有涡轮叶片,当容器的进液口的流量很大时,液体本身的流动可以带动涡轮叶片转动,涡轮叶片进而带动液体形成涡流;当容器的进液口的流量很小时,可以利用驱动组件驱动涡轮叶片转动,涡轮叶片进而带动液体形成涡流;在涡流的旋转下,各处的液体可以与电极模块充分接触,从而进一步提升对液体的净化效果。
205.单位时间内流过某一段管道的流体的体积,称为该横截面的体积流量,简称为流量。
206.本技术对预设流量阈值不作限定,预设流量阈值例如可以是10ml/s、30ml/s或者50ml/s。
207.本技术对驱动组件不作限定,驱动组件例如可以是振动电机(双向震荡马达)。
208.在另一些实施方式中,可以控制双向震荡马达驱动螺旋搅动棒,以使所述液体在所述螺旋搅动棒的带动下形成涡流。
209.参见图4,图4是本技术实施例提供的一种清洗设备的控制装置的结构框图。
210.所述装置100用于对容器内的液体进行净化,其具体实现方式与上述控制方法的实施例中记载的实施方式、所达到的技术效果一致,部分内容不再赘述。
211.所述清洗设备设置有电极模块,所述装置100包括:
212.催化发泡模块101,用于当所述清洗设备满足预设启动条件时,控制所述清洗设备交替循环地启用催化模式和发泡模式;
213.电泳吸附模块102,用于当所述清洗设备满足预设吸附条件时,控制所述清洗设备启用电泳模式;
214.其中,所述电极模块在所述催化模式、所述发泡模式和所述电泳模式下的电气参数各不相同;
215.在所述催化模式下,所述电极模块对所述液体进行电解,生成氧化水合物和预设气体,所述氧化水合物用于凝聚所述液体中的杂质颗粒以形成絮粒;
216.在所述发泡模式下,所述电极模块将所述预设气体从所述液体中分离,形成气泡,以使所述絮粒黏附于所述气泡,实现气浮分离;
217.在所述电泳模式下,所述电极模块利用螯合剂置换所述液体中的重金属离子形成沉淀,以使所述沉淀在电泳效应的作用下被吸附至所述电极模块表面。
218.在一些可选的实施例中,所述预设启动条件包括以下至少一种:
219.接收到用户启动清洗的操作;
220.当前时刻处于预设时刻范围;
221.所述预设吸附条件包括以下至少一种:
222.接收到用户停止清洗的操作;
223.所述氧化水合物的浓度不小于预设浓度阈值;
224.所述液体的气泡参数的参数值不小于第一预设阈值;
225.所述催化模式和所述发泡模式的工作时长不小于预设时长阈值;
226.所述催化模式和所述发泡模式交替循环的次数不小于预设次数阈值。
227.在一些可选的实施例中,所述预设吸附条件包括:所述液体的气泡参数的参数值不小于第一预设阈值;
228.所述液体的气泡参数的参数值采用以下方式获取:
229.利用气泡检测模块获取所述液体的气泡参数的参数值;其中,所述气泡检测模块包括以下至少一种:光电传感器和超声波传感器。
230.参见图5,图5是本技术实施例提供的另一种清洗设备的控制装置的结构框图。
231.在一些可选的实施例中,所述装置100还包括:
232.成分检测模块201,用于利用视觉检测设备和光谱分析仪对所述液体进行检测,以获取所述液体对应的混合物成分;
233.螯合剂选型模块202,用于基于所述混合物成分,获取所述液体对应的螯合剂的类型,以使所述清洗设备在所述电泳模式下采用对应类型的螯合剂。
234.参见图6,图6是本技术实施例提供的再一种清洗设备的控制装置的结构框图。
235.在一些可选的实施例中,所述装置100还包括:
236.沉淀检测模块301,用于获取所述电极模块对应的沉淀参数的参数值,所述沉淀参数用于指示所述电极模块表面所吸附的沉淀的密集程度;
237.反向电场模块302,用于当所述沉淀参数的参数值不小于第二预设阈值时,向所述电极模块施加与所述电泳模式极性相反的电场,以使所述沉淀从所述电极模块表面脱落。
238.在一些可选的实施例中,所述电极模块包括电容式传感器、正电极栅板和负电极栅板;
239.所述沉淀检测模块包括:
240.电容量检测单元,用于利用所述电容式传感器获取所述正电极栅板和所述负电极栅板之间的电容量;
241.沉淀计算单元,用于基于所述电容量,获取所述正电极栅板和所述负电极栅板对应的沉淀参数的参数值。
242.在一些可选的实施例中,所述装置100还包括:
243.电场停止模块,用于当所述沉淀参数的参数值不大于第三预设阈值时,停止向所述电极模块施加与所述电泳模式极性相反的电场,所述第三预设阈值小于所述第二预设阈值。
244.在一些可选的实施例中,所述清洗设备设置有驱动组件和涡轮叶片,所述装置100还包括:
245.流量获取模块,用于获取所述容器的进液口的流量;
246.涡轮驱动模块,用于当所述流量不大于预设流量阈值时,控制所述驱动组件驱动所述涡轮叶片,以使所述液体在所述涡轮叶片的带动下形成涡流,从而令所述液体和所述电极模块充分接触。
247.参见图7,本技术实施例还提供了一种电子设备200,电子设备200包括至少一个存储器210、至少一个处理器220以及连接不同平台系统的总线230。
248.存储器210可以包括易失性存储器形式的可读介质,例如随机存取存储器(ram)211和/或高速缓存存储器212,还可以进一步包括只读存储器(rom)213。
249.其中,存储器210还存储有计算机程序,计算机程序可以被处理器220执行,使得处理器220执行本技术实施例中控制方法的步骤,其具体实现方式与上述控制方法的实施例中记载的实施方式、所达到的技术效果一致,部分内容不再赘述。
250.存储器210还可以包括具有至少一个程序模块215的实用工具214,这样的程序模块215包括但不限于:操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。
251.相应的,处理器220可以执行上述计算机程序,以及可以执行实用工具214。
252.总线230可以为表示几类总线结构中的一种或多种,包括存储器总线或者存储器控制器、外围总线、图形加速端口、处理器或者使用多种总线结构中的任意总线结构的局域总线。
253.电子设备200也可以与一个或多个外部设备240例如键盘、指向设备、蓝牙设备等通信,还可与一个或者多个能够与该电子设备200交互的设备通信,和/或与使得该电子设备200能与一个或多个其它计算设备进行通信的任何设备(例如路由器、调制解调器等)通信。这种通信可以通过输入输出接口250进行。并且,电子设备200还可以通过网络适配器260与一个或者多个网络(例如局域网(lan),广域网(wan)和/或公共网络,例如因特网)通信。网络适配器260可以通过总线230与电子设备200的其它模块通信。应当明白,尽管图中未示出,可以结合电子设备200使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理器、外部磁盘驱动阵列、raid系统、磁带驱动器以及数据备份存储平台等。
254.本技术实施例还提供了一种计算机可读存储介质,该计算机可读存储介质用于存储计算机程序,所述计算机程序被执行时实现本技术实施例中控制方法的步骤,其具体实现方式与上述控制方法的实施例中记载的实施方式、所达到的技术效果一致,部分内容不再赘述。
255.图8示出了本实施例提供的用于实现上述控制方法的程序产品300,其可以采用便携式紧凑盘只读存储器(cd-rom)并包括程序代码,并可以在终端设备,例如个人电脑上运行。然而,本发明的程序产品300不限于此,在本技术中,可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。程序产品300可以采用一个或多个可读介质的任意组合。可读介质可以是可读信号介质或者可读存储介质。可读存储介质例如可以为但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。
256.计算机可读存储介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了可读程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。可读存储介质还可以是任何可读介质,该可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。可读存储介质上包含的程序代码可以用任何适当的介质传输,包括但不限于无线、有线、光缆、rf等,或者上述的任意合适的组合。可以以一种或多种程序设计语言的任意组合来编写用于执行本发明操作的程序代码,程序设计语言包括面向对象的程序设计语言诸如java、c 等,还包括常规的过程式程序设计语言诸如c语言或类似的程序设计语言。程序代码可以完全地在用户计算设备上执行、部分地在用户设备上执行、作为一个独立的软件包执行、部分在用户计算设备上部分在远程计算设备上执行、或者完全在远程计算设备或服务器上执行。在涉及远程计算设备的情形中,远程计算设备可以通过任意种类的网络,包括局域网(lan)或广域网(wan),连接到用户计算设备,或者,可以连接到外部计算设备(例如利用因特网服务提供商来通过因特网连接)。
257.本技术从使用目的上,效能上,进步及新颖性等观点进行阐述,已符合专利法所强调的功能增进及使用要件,本技术以上的说明书及说明书附图,仅为本技术的较佳实施例而已,并非以此局限本技术,因此,凡一切与本技术构造,装置,特征等近似、雷同的,即凡依本技术专利申请范围所作的等同替换或修饰等,皆应属本技术的专利申请保护的范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。