技术特征:
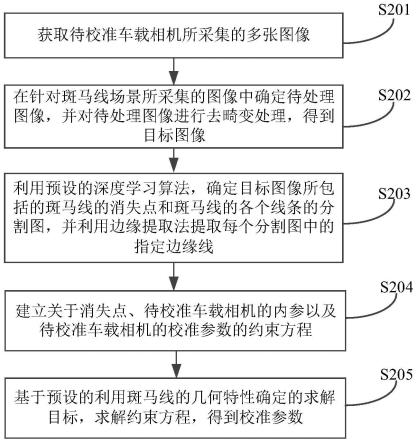
1.一种校准参数确定方法,其特征在于,所述方法包括:获取待校准车载相机所采集的多张图像;在针对斑马线场景所采集的图像中确定待处理图像,并对所述待处理图像进行去畸变处理,得到目标图像;利用预设的深度学习算法,确定所述目标图像所包括的斑马线的消失点和所述斑马线的各个线条的分割图,并利用边缘提取算法提取每个分割图中的指定边缘线;其中,所述指定边缘线与所述斑马线的通行方向呈指定几何关系;建立关于所述消失点、所述待校准车载相机的内参以及所述待校准车载相机的校准参数的约束方程;其中,所述内参包括:主点和焦距;所述校准参数包括:俯仰角、偏航角和滚动角;基于预设的利用斑马线的几何特性确定的求解目标,求解所述约束方程,得到所述校准参数;其中,所述求解目标包括:所述指定边缘线平行。2.根据权利要求1所述的方法,其特征在于,所述待校准车载相机所在车辆的车身前方、车身后方、车身左侧和车身右侧中的至少一个方向分别安装有至少一个车载相机;所述待校准车载相机包括所述车辆所安装的车载相机中的一个或多个。3.根据权利要求2所述的方法,其特征在于,所述待校准车载相机包括安装在所述车辆的车身前方和/或车身后方的至少一个车载相机;所述利用预设的深度学习算法,确定所述目标图像所包括的斑马线的消失点和所述斑马线的各个线条的分割图,并利用边缘提取算法提取每个分割图中的指定边缘线,包括:利用预设的深度学习算法,确定所述目标图像所包括的斑马线的第一消失点和所述斑马线的各个线条的分割图,并利用边缘提取算法提取每个分割图中的与所述斑马线的通行方向垂直的第一指定边缘线;其中,所述各个线条的分割图中的第一边缘线的延长线相交于所述第一消失点。4.根据权利要求2所述的方法,其特征在于,所述待校准车载相机包括安装在所述车辆的车身左侧和/或车身右侧的至少一个车载相机;所述利用预设的深度学习算法,确定所述目标图像所包括的斑马线的消失点和所述斑马线的各个线条的分割图,并利用边缘提取算法提取每个分割图中的指定边缘线,包括:利用预设的深度学习算法,确定所述目标图像所包括的斑马线的第二消失点和所述斑马线的各个线条的分割图,并利用边缘提取算法提取每个分割图中的与所述斑马线的通行方向垂直的第二指定边缘线;其中,所述各个线条的分割图中与所述斑马线的通行方向平行的边缘线的延长线相交于所述第二消失点。5.根据权利要求1所述的方法,其特征在于,若所述目标图像中包括斑马线中的多个线条,则所述求解目标还包括:所述斑马线中的每条线条的宽度相同,和/或,所述斑马线中的每条线条的高度相同;若所述目标图像所包括的斑马线中的线条的数量大于2,则所述求解目标还包括:所述斑马线中的每条线条的宽度相同、所述斑马线中的每条线条的高度相同和所述斑马线中各组相邻线条之间的间距相同中的至少一个。6.根据权利要求1所述的方法,其特征在于,所述约束方程是关于所述消失点在所述目标图像对应的图像坐标系中的坐标、所述主点在所述图像坐标系中的坐标、所述待校准车
载相机的横向焦距、所述待校准车载相机的纵向焦距、所述俯仰角、所述偏航角和所述滚动角的方程。7.根据权利要求1所述的方法,其特征在于,所述待校准车载相机的数量为多个,所述方法还包括:利用所述校准参数对所述待校准车载相机所采集的图像进行校准;对校准后的所述待校准车载相机所采集的图像进行拼接,得到拼接图像。8.一种校准参数确定装置,其特征在于,所述装置包括:图像获取模块,用于获取待校准车载相机所采集的多张图像;处理模块,用于在针对斑马线场景所采集的图像中确定待处理图像,并对所述待处理图像进行去畸变处理,得到目标图像;确定模块,用于利用预设的深度学习算法,确定所述目标图像所包括的斑马线的消失点和所述斑马线的各个线条的分割图,并利用边缘提取算法提取每个分割图中的指定边缘线;其中,所述指定边缘线与所述斑马线的通行方向呈指定几何关系;方程建立模块,用于建立关于所述消失点、所述待校准车载相机的内参以及所述待校准车载相机的校准参数的约束方程;其中,所述内参包括:主点和焦距;所述校准参数包括:俯仰角、偏航角和滚动角;求解模块,用于基于预设的利用斑马线的几何特性确定的求解目标,求解所述约束方程,得到所述校准参数;其中,所述求解目标包括:所述指定边缘线平行。9.根据权利要求8所述的装置,其特征在于,所述待校准车载相机所在车辆的车身前方、车身后方、车身左侧和车身右侧中的至少一个方向分别安装有至少一个车载相机;所述待校准车载相机包括所述车辆所安装的车载相机中的一个或多个;和/或,所述待校准车载相机包括安装在所述车辆的车身前方和/或车身后方的至少一个车载相机;所述确定模块,具体用于:利用预设的深度学习算法,确定所述目标图像所包括的斑马线的第一消失点和所述斑马线的各个线条的分割图,并利用边缘提取算法提取每个分割图中的与所述斑马线的通行方向垂直的第一指定边缘线;其中,所述各个线条的分割图中的第一边缘线的延长线相交于所述第一消失点;和/或,所述待校准车载相机包括安装在所述车辆的车身左侧和/或车身右侧的至少一个车载相机;所述确定模块,具体用于:利用预设的深度学习算法,确定所述目标图像所包括的斑马线的第二消失点和所述斑马线的各个线条的分割图,并利用边缘提取算法提取每个分割图中的与所述斑马线的通行方向垂直的第二指定边缘线;其中,所述各个线条的分割图中与所述斑马线的通行方向平行的边缘线的延长线相交于所述第二消失点;和/或,若所述目标图像中包括所述斑马线中的多个线条;则所述求解目标还包括:所述斑马
线中的每个线条的宽度相同,和/或,所述斑马线中的每个线条的高度相同;若所述目标图像所包括的斑马线中的线条的数量大于2;则所述求解目标还包括:所述斑马线中的每个线条的宽度相同、所述斑马线中的每个线条的高度相同和所述斑马线中各组相邻线条之间的间距相同中的至少一个;和/或,所述约束方程是关于所述消失点在所述目标图像对应的图像坐标系中的坐标、所述主点在所述图像坐标系中的坐标、所述待校准车载相机的横向焦距、所述待校准车载相机的纵向焦距、所述俯仰角、所述偏航角和所述滚动角的方程;和/或,所述待校准车载相机的数量为多个,所述装置还包括:校准模块,用于利用所述校准参数对所述待校准车载相机采集的图像进行校准;拼接模块,用于对校准后的所述待校准车载相机所采集的图像进行拼接,得到拼接图像。10.一种电子设备,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序时,实现权利要求1-7任一所述的方法步骤。11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-7任一所述的方法步骤。
技术总结
本发明实施例提供了一种校准参数确定方法、装置及电子设备,涉及校准领域。该方法包括:获取待校准车载相机所采集的多张图像;在针对斑马线场景所采集的图像中确定待处理图像,并对待处理图像进行去畸变处理,得到目标图像;然后,利用预设的深度学习算法,确定目标图像所包括的斑马线的消失点和斑马线的各个线条的分割图,并利用边缘提取算法提取每个分割图中的指定边缘线;建立关于消失点、待校准车载相机的内参以及待校准车载相机的校准参数的约束方程;基于预设的利用斑马线的几何特性确定的求解目标,求解约束方程,得到校准参数。应用本发明实施例提供的方案,可以提高拼接图像对汽车周围的路况的展示准确性。接图像对汽车周围的路况的展示准确性。接图像对汽车周围的路况的展示准确性。
技术研发人员:陈佳伟 万其明
受保护的技术使用者:杭州海康威视数字技术股份有限公司
技术研发日:2022.06.15
技术公布日:2022/9/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。