技术特征:
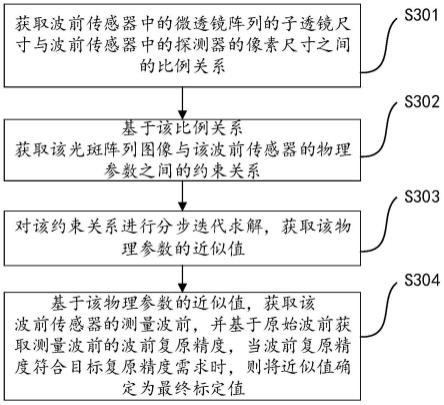
1.一种波前传感器物理参数的标定系统,其特征在于,所述系统包括:球面波发生装置、待标定的波前传感器以及数据处理器,所述球面波发生装置包括:激光器、会聚透镜以及球面波发生器;所述激光器,用于输出激光,输出的所述激光通过所述会聚透镜聚焦至所述球面波发生器上;所述球面波发生器,用于当接收到所述激光时产生球面波,所述球面波发生器与所述会聚透镜的焦点重合;所述待标定的波前传感器,用于对所述球面波进行检测,并产生与所述球面波相应的光斑阵列图像;所述数据处理器,用于获取波前传感器中的微透镜阵列的子透镜尺与波前传感器中的探测器的像素尺寸之间的比例关系,基于所述比例关系获取所述光斑阵列图像与所述波前传感器的物理参数之间的约束关系,并对所述约束关系进行分步迭代求解,获取所述物理参数的近似值;所述物理参数包括:微透镜阵列的焦距、微透镜阵列的子透镜尺寸、探测器的像素尺寸及像素个数;所述数据处理器,还用于基于所述物理参数的近似值,获取所述波前传感器的测量波前,并基于原始波前获取所述测量波前的波前复原精度,当所述波前复原精度符合目标复原精度需求时,则将所述近似值确定为最终标定值。2.根据权利要求1所述的系统,其特征在于,所述球面波发生装置还包括:玻璃基板;所述玻璃基板设置于所述会聚透镜的焦面上,所述球面波发生器固定在所述玻璃基板上,与所述会聚透镜的焦点重合;所述球面波发生器为纳米颗粒。3.根据权利要求1或2所述的系统,其特征在于,所述系统还包括:位移平台,所述位移平台包括滑块、直线导轨及光栅尺,所述位移平台用于实现所述球面波与所述波前传感器的对准操作;其中,所述球面波发生装置固定于所述滑块上,所述待标定的波前传感器固定于所述直线导轨上;所述光栅尺设置于所述直线导轨的侧面上,光栅读数头固定于所述滑块上。4.一种波前传感器物理参数的标定方法,其特征在于,所述方法由波前传感器物理参数的标定系统中的数据处理器执行,所述系统包括:球面波发生装置、待标定的波前传感器以及所述数据处理器,所述球面波发生装置包括:激光器、会聚透镜以及球面波发生器;其中,所述激光器,用于输出激光,输出的所述激光通过所述会聚透镜聚焦至所述球面波发生器上;所述球面波发生器,用于当接收到所述激光时产生球面波,所述球面波发生器与所述会聚透镜的焦点重合;所述待标定的波前传感器,用于对所述球面波进行检测,并产生与所述球面波相应的光斑阵列图像;所述方法包括:获取波前传感器中的微透镜阵列的子透镜尺寸与波前传感器中的探测器的像素尺寸之间的比例关系;基于所述比例关系获取所述光斑阵列图像与所述波前传感器的物理参数之间的约束关系;
对所述约束关系进行分步迭代求解,获取所述物理参数的近似值;所述物理参数包括:微透镜阵列的焦距、微透镜阵列的子透镜尺寸、探测器的像素尺寸及像素个数;基于所述物理参数的近似值,还用于基于所述物理参数的近似值,获取所述波前传感器的测量波前,并基于原始波前获取所述测量波前的波前复原精度,当所述波前复原精度符合目标复原精度需求时,则将所述近似值确定为最终标定值。5.根据权利要求4所述的方法,其特征在于,所述基于所述比例关系获取所述光斑阵列图像与所述波前传感器的物理参数之间的约束关系,包括:通过如下公式获取所述光斑阵列图像与所述波前传感器的物理参数之间的初始约束关系:关系:其中,q表示所述光斑阵列图像中的阵列间距,r表示球面波的曲率半径,p表示为微透镜阵列的子透镜尺寸,f表示微透镜阵列的焦距,n表示探测器的像素个数,s表示探测器的像素尺寸,n
i
表示纳米颗粒在不同位置时,所对应的不同光斑间距,i∈[1,k],l
i
表示纳米颗粒在不同位置时与直线导轨上的目标参照点之间的距离,l0表示探测器与所述目标参照点之间的距离,p、f、n、s均为该物理参数;基于所述初始约束关系及所述比例关系,获取所述光斑阵列图像与所述波前传感器的物理参数之间的目标约束关系。6.根据权利要求5所述的方法,其特征在于,通过如下公式对所述目标约束关系进行表示:其中,w表示微透镜阵列的子透镜尺寸与探测器的像素尺寸之间的比例。7.根据权利要求4-6任一项所述的方法,其特征在于,所述对所述约束关系进行分步迭代求解,获取所述物理参数的近似值,包括:通过第一子目标约束关系式及第二子目标约束关系式对所述目标约束关系进行分步表示;通过如下公式对所述第一子目标约束关系式进行表示:通过如下公式对所述第二子目标约束关系式进行表示:分别对所述第一子目标约束关系式及所述第二子目标约束关系式进行迭代求解,获取所述物理参数的近似值。8.一种波前传感器物理参数的标定装置,其特征在于,所述装置包括:比例关系获取模块,用于获取微透镜阵列的子透镜尺寸与探测器的像素尺寸之间的比
例关系;约束关系式获取模块,用于基于所述比例关系获取所述光斑阵列图像与所述波前传感器的物理参数之间的约束关系;近似值获取模块,用于对所述约束关系进行分步迭代求解,获取所述物理参数的近似值;所述物理参数包括:微透镜阵列的焦距、微透镜阵列的子透镜尺寸、探测器的像素尺寸及像素个数;最终标定值获取模块,用于基于所述物理参数的近似值,获取所述波前传感器的测量波前,并基于原始波前获取所述测量波前的波前复原精度,当所述波前复原精度符合目标复原精度需求时,则将所述近似值确定为最终标定值。9.一种计算机设备,其特征在于,所述计算机设备包括数据处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述数据处理器加载并执行以实现如权利要求4至7任一所述的一种波前传感器物理参数的标定方法。10.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如权利要求4至7任一所述的一种波前传感器物理参数的标定方法。
技术总结
本申请公开了一种波前传感器物理参数的标定系统、方法及装置,包括:球面波发生装置、待标定的波前传感器及数据处理器。先通过球面波发生装置产生高精度球面波,待标定的波前传感器基于该球面波产生与之相应的光斑阵列图像;数据处理器获取微透镜阵列的子透镜尺寸与探测器的像素尺寸之间的比例关系,再基于该比例关系、光斑阵列图像及各物理参数之间的约束关系对波前传感器的各物理参数迭代求解,获取各物理参数的近似值,最后,通过波前复原精度的分析确定各物理参数的最终标定值。解决了由于现有技术手段的缺失,无法对波前传感器的物理参数进行高精度标定的技术问题,将各物理参数收敛到目标精度范围内,提高了波前传感器的测量精度。测量精度。测量精度。
技术研发人员:包明帝 何益 叶虹 史国华
受保护的技术使用者:中国科学院苏州生物医学工程技术研究所
技术研发日:2022.06.14
技术公布日:2022/9/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。