1.本发明涉及信号编码及译码技术领域,具体而言,涉及一种基于随机应答延时的敌我识别解交织方法及系统。
背景技术:
2.探测方朝着目标发射询问射频信号,目标接收到询问射频信号后向探测方发射应答射频信号,这种通用一问一答,发射两次射频信号实现探测方对目标进行定位的方式称为二次雷达。敌我识别系统就是利用二次雷达原理,在问答信息中加入敌我识别信息,实现探测方对友方目标的定位和敌我确认。但是,当多个友方目标相对于探测方的距离相近(≤3km)且方位相近(≤3
°
)时,这几个友方目标会几乎同时响应探测方的询问并进行应答,使得多方的应答射频信号会彼此重合在一起,形成交织,导致探测方无法正确提取出每个友方目标回答的识别信息,最终造成识别失败。
3.随着各国军用飞行器数量的不断增加,敌我识别时出现交织的概率大大提高。然而,现有的编码译码技术无法从交织的应答射频信号中正确地识别出目标信息。
4.有鉴于此,特提出本技术。
技术实现要素:
5.本发明所要解决的技术问题是:现有的编码译码技术无法从交织的应答射频信号中正确地识别出目标信息,目的在于提供一种基于随机应答延时的敌我识别解交织方法及系统,可避免多个应答目标同时发射的应答信号出现交织,保证探测方能够准确地对目标应答信息进行识别,并解析出目标相对于探测方的距离。
6.本发明通过下述技术方案实现:一方面,本技术提供一种基于随机应答延时的敌我识别解交织方法,包括以下步骤:在应答方一侧,向应答信息中增加随机应答延时字段,对含有随机应答延时字段的应答信息进行编码和加密;根据随机应答延时字段的值,将编码和加密后的应答信息进行延时后发送至探测方一侧;在探测方一侧,接收应答方发送的应答信息,对应答信息进行解密和译码;从经过解密和译码后的应答信息中提取出有效应答字段和随机应答延时字段;根据获取的有效应答字段和随机应答延时字段对应答目标进行定位并确定应答目标的距离。
7.进一步的,所述应答方一侧包括多个应答目标;向各个应答目标的应答信息中增加的随机应答延时字段的长度各不相同。
8.进一步的,所述确定应答目标的距离包括以下步骤:确定出询问信息的发出时间和应答信息的接收时间;
计算询问信息的发出时间与应答信息的接收时间之间的时间差;根据所述时间差获取应答目标的距离。
9.进一步的,所述确定应答目标的距离包括以下步骤:建立目标距离计算模型;获取模型参数,所述模型参数包括:探测方朝各应答目标发出询问信息的时刻与接收到各应答目标反馈的应答信息的时刻的时间差,以及各应答目标的应答延时时长;根据所述目标距离计算模型和所述模型参数,计算获得应答目标的距离。
10.进一步的,所述目标距离计算模型为:;其中,t表示探测方发出的询问信号到达应答目标1或应答目标2的时长,t1表示探测方向应答目标1发出询问信息的时刻与接收到应答目标1反馈的应答信息的时刻的时间差,t2表示探测方向应答目标2发出询问信息的时刻与接收到应答目标2反馈应答信息的时刻的时间差,a表示应答目标1的应答延时时长,b表示应答目标2的应答延时时长,d表示探测方距离应答目标1或应答目标2的距离,c表示光速。
11.另一方面,本技术提供一种基于随机应答延时的敌我识别解交织系统,包括:应答信号处理端,用于向应答信息中增加随机应答延时字段,对含有随机应答延时字段的应答信息进行编码和加密;根据随机应答延时字段的值,将编码和加密后的应答信息进行延时后发送至询问信号处理端;询问信号处理端,用于接收应答信号处理端发送的应答信息,对应答信息进行解密和译码;从经过解密和译码后的应答信息中提取出有效应答字段和随机应答延时字段;根据获取的有效应答字段和随机应答延时字段对应答目标进行定位并确定应答目标的距离。
12.进一步的,所述应答信号处理端包括多个应答处理器;所述应答处理器包括:延时信息添加模块,用于向应答信息中增加随机应答延时字段;编码及加密模块,用于对含有随机应答延时字段的应答信息进行编码和加密;延时处理模块,用于根据随机应答延时字段的值,将编码和加密后的应答信息进行延时;应答信息发送模块,用于将延时后的应答信息发送至询问信号处理端;各个应答处理器中增加的随机应答延时字段的长度各不相同。
13.进一步的,所述询问信号处理端包括:应答信息接收模块,用于接收应答信号处理端发送的应答信息;解密及译码模块,用于对应答信息进行解密和译码;
信息提取模块,用于从经过解密和译码后的应答信息中提取出有效应答字段和随机应答延时字段;应答目标定位模块,用于根据获取的有效应答字段和随机应答延时字段对应答目标进行定位;应答目标测距模块,用于根据获取的有效应答字段和随机应答延时字段确定应答目标的距离。
14.进一步的,所述应答目标测距模块包括:模型构建单元,用于建立目标距离计算模型;参数获取单元,用于获取模型参数,所述模型参数包括:探测方朝各应答目标发出询问信息的时刻与接收到各应答目标反馈的应答信息的时刻的时间差,以及各应答目标的应答延时时长;模型计算单元,用于从所述参数获取单元中提取模型参数,将提取的模型参数代入目标距离计算模型中进行计算,得到应答目标的距离。
15.进一步的,所述参数获取单元包括:计时器,用于记录探测方朝各应答目标发出询问信息的时刻与接收到各应答目标反馈的应答信息的时刻的时间差;应答延时提取子单元,用于从所述解密及译码模块中提取出各应答目标的应答延时时长。
16.本发明与现有技术相比,具有如下的优点和有益效果:通过向各应答目标的应答信息中随机添加长度不同的随机应答延时字段,使应答目标根据各自的应答延时信息对编码和加密后的应答信息进行延时后发送至探测方,即使各应答目标相对于探测方的距离完全相同且同时做出应答相应,也可保证探测方接受到的应答信息不会交织重合在一起,进而实现探测方能够准确地对各目标的应答信息进行译码并获得应答信息。
附图说明
17.为了更清楚地说明本发明示例性实施方式的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应答理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
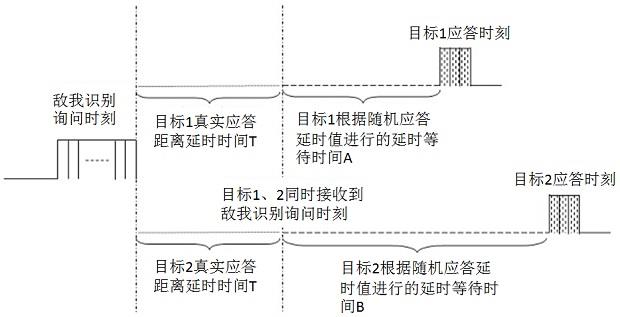
18.图1为本发明实施例1提供的ma应答编码波形图;图2为本发明实施例1提供的单个ma应答信息波形图;图3为本发明实施例1提供的两个ma应答信息重合交织波形图;图4为本发明实施例1提供的满足民航空管二次雷达系统的应答编码波形图;图5为本发明实施例1提供的自定义的敌我识别应答信息图;图6为本发明实施例1提供的自定义的敌我识别应答信息处理流程图;图7为本发明实施例1提供的自定义的敌我识别应答发射时序图;图8为本发明实施例1提供的自定义的敌我识别询问应答时序图。
具体实施方式
19.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
20.实施例1如图1所示,目前民用ma应答编码由两个框架脉冲(f1和f2)和12个信息脉冲(a1、a2、a4、b1、b2、b4、c1、c2、c4、d1、d2和d4)组成;所有应答编码脉冲的宽度为0.45us
±
0.1us,所有相邻脉冲间的间隔为1.45μs
±
0.1us。
21.在不交织的情况下,单个ma应答信息波形如图2所示。二次雷达探测方实时对接收到的应答信号进行译码,当接收到有满足脉冲宽度为0.45
±
0.1
µ
s,f1~f2脉冲间距为20.3
µs±
0.1
µ
s,各脉冲幅度差≤1db,则认为接收到一个有效的m2应答信号,随即抽取f1和f2脉冲之间的信息码。12个信息脉冲的译码规则为4组代码,每组代码由3位bcd码构成。例如:当a1=1、a2=0、a4=0,则a代码最终译码结果为a代码=1;当b1=1、b2=1、b4=0,则b代码最终译码结果为b代码=3;当c1=0、c2=0、c4=1,则c代码最终译码结果为c代码=4;当d1=0、d2=1、d4=1,则d代码最终译码结果为d代码=6,因此最终ma代码译码结果为:1346。
22.两个目标应答的信息交织的情况如图3所示,如果两个目标相位相近,则会导致重合的有效信息脉冲幅度明显增加;如果两目标相位相差接近180
°
,则会导致重合的有效信息脉冲幅度明显减小。这两种情况都会造成有效信息的脉冲幅度极为不均匀。译码时无法找到一组脉冲幅度差≤1db的f1和f2,从而无法进行信息抽取。即使放宽译码要求,由于目标2的有效信息脉冲与目标1有效信息脉冲重合(比如目标2的c1脉冲与目标1的c2脉冲时序重合),在抽取信息码时,也必然会得到错误的译码结果。
23.在现实情况中,由于某些探测方天线波束宽度很宽(30
°
~40
°
),某些探测方向目标非常集中(比如机场方向),从而导致目标相对于探测方出现3重、4重甚至更多重交织的情况,且每两两目标之间的交织情况又各不相同,所以在这种情况下依靠已有的译码方式很难甚至无法正确译码。
24.针对现有的编码译码技术无法从交织的应答射频信号中正确地识别出目标信息情况,本实施例提供一种基于随机应答延时的敌我识别解交织方法,可避免多个应答目标同时发射的应答信号出现交织,保证探测方能够准确地对目标应答信息进行识别,并解析出目标相对于探测方的距离。该方法的实施方式如下:步骤1:在应答方一侧,向应答信息中增加随机应答延时字段。
25.虽然敌我识别系统基于二次雷达原理,但是敌我识别具体应答信息可以是每个国家自定义设计的,并不受限于民航空管二次雷达应答编码规则。如图4所示,一个满足民航空管二次雷达系统的应答编码,其脉冲宽度,脉冲间隔和每个信息脉冲的具体含义均有严格要求。也正是因为这种严格的统一要求,才能保证所有民航飞行器能被各个不同国家的空管二次雷达正确探测和目标定位。而本实施例定义的敌我识别应答信息,如图5,该敌我识别应答信息除了包含传统的敌我识别应答的具体信息外,还包含敌我识别应答的随机应答延时值,增加的随机应答延时字段使得各目标会根据各自的随机应答延时值不同而等待不同的时间后延时应答,从根本上避免了出现应答交织的可能性。
26.步骤2:对含有随机应答延时字段的应答信息进行编码和加密。
27.敌我识别应答信息加密和编码的流程如图6所示。由于随机应答延时值的随机性,所以每次某个目标应答编码时用到的随机应答延时值都是随机的。即使多个目标相对于探测方的距离完全相同,同时响应探测方的询问,同时进行应答编码时,每个目标所用的随机应答延时值也是不同的。需说明的是,本实施例采用现有的编码和加密技术对含有随机应答延时字段的应答信息进行编码和加密,其编码和加密的具体实现方式此处不再赘述。
28.步骤3:根据随机应答延时字段的值,将编码和加密后的应答信息进行延时后发送至探测方一侧。
29.如图7所示,目标1和目标2由于采用了不同的随机应答延时值,所以目标1和目标2同时响应同一个敌我识别询问时,分别等待了不同的时间再发射应答编码。目标1和目标2本该交织重合在一起的应答编码,由于各自的应答延时等待时间不同,最终错开。
30.步骤4:在探测方一侧,接收应答方发送的应答信息,对应答信息进行解密和译码。
31.如图8所示,目标1和目标2本该交织重合在一起的应答编码,由于各自的应答延时等待时间不同而错开,使得探测方接收到应答编码后可以很轻松的进行译码。
32.步骤5:从经过解密和译码后的应答信息中提取出有效应答字段和随机应答延时字段。
33.步骤6:根据获取的有效应答字段和随机应答延时字段对应答目标进行定位并确定应答目标的距离。
34.具体的,确定应答目标的距离包括以下步骤:步骤6.1:确定出探测方朝各应答目标发出询问信息的时刻与接收到各应答目标反馈的应答信息的时刻。
35.步骤6.2:分别计算各询问信息的发出时间与应答信息的接收时间之间的时间差。
36.步骤6.3:建立目标距离计算模型。
37.步骤6.4:从译码后的应答信息中提取出各应答目标的应答延时时长。
38.步骤6.5:将各个时间差和各应答目标的应答延时时长代入该目标距离计算模型中,计算得出应答目标相对于探测方的距离。
39.其中,目标距离计算模型如下:;其中,t表示探测方发出的询问信号到达应答目标1或应答目标2的时长,t1表示探测方向应答目标1发出询问信息的时刻与接收到应答目标1反馈的应答信息的时刻的时间差,t2表示探测方向应答目标2发出询问信息的时刻与接收到应答目标2反馈应答信息的时刻的时间差,a表示应答目标1的应答延时时长,b表示应答目标2的应答延时时长,d表示探测方距离应答目标1或应答目标2的距离,c表示光速。
40.需补充说明的是,探测方是根据询问信号发出的时刻和接收到应答信号时刻之间的时间差,来计算应答目标的距离。假设探测方询问信号发出的时刻和接收到目标1应答信号时刻之间的时间差为t1,探测方询问信号发出的时刻和接收到目标2应答信号时刻之间的时间差为t2。根据图8所示的敌我识别询问应答时序,可推出t1=2t a,即t=(t1-a)/2;t2=2t b,即t=(t2-b)/2。针对t1和t2的值,探测方可根据询问信号发出的时刻和接收到目标应答信号时刻的时间差计算出来。探测方同时可以通过译码,解密,然后提取出目标1和目标2
分别的随机应答延时值,从而得到a和b的值。通过得到的t1、t2、a和b的值,最终探测方可以计算出目标1和目标2的真实应答距离延时时间t。最后将延时时间t与光速相乘得到目标相对于探测方的距离。
41.根据本实施例提供的基于随机应答延时的敌我识别解交织方法,当多个应答目标相对于探测方的距离相近(≤3km),方位相近(≤3
°
)时,它们会根据各自的随机应答延时值不同而等待不同的时间后延时应答,从根本上避免了出现应答交织的可能性。由于应答信息不会出现交织,探测方可以很轻松的完成目标的敌我属性的确认。由于应答信息中包含了应答随机延时值,探测方可以通过简单的计算,得到目标相对于探测方的距离。
42.实施例2与实施例1对应的,本实施例提供一种基于随机应答延时的敌我识别解交织系统,包括:应答信号处理端,用于向应答信息中增加随机应答延时字段,对含有随机应答延时字段的应答信息进行编码和加密;根据随机应答延时字段的值,将编码和加密后的应答信息进行延时后发送至询问信号处理端;询问信号处理端,用于接收应答信号处理端发送的应答信息,对应答信息进行解密和译码;从经过解密和译码后的应答信息中提取出有效应答字段和随机应答延时字段;根据获取的有效应答字段和随机应答延时字段对应答目标进行定位并确定应答目标的距离。
43.其中,应答信号处理端包括多个应答处理器;所述应答处理器包括:延时信息添加模块,用于向应答信息中增加随机应答延时字段;编码及加密模块,用于对含有随机应答延时字段的应答信息进行编码和加密;延时处理模块,用于根据随机应答延时字段的值,将编码和加密后的应答信息进行延时;应答信息发送模块,用于将延时后的应答信息发送至询问信号处理端;各个应答处理器中增加的随机应答延时字段的长度各不相同。
44.进一步的,所述询问信号处理端包括:应答信息接收模块,用于接收应答信号处理端发送的应答信息;解密及译码模块,用于对应答信息进行解密和译码;信息提取模块,用于从经过解密和译码后的应答信息中提取出有效应答字段和随机应答延时字段;应答目标定位模块,用于根据获取的有效应答字段和随机应答延时字段对应答目标进行定位;应答目标测距模块,用于根据获取的有效应答字段和随机应答延时字段确定应答目标的距离。
45.进一步的,所述应答目标测距模块包括:
模型构建单元,用于建立目标距离计算模型;参数获取单元,用于获取模型参数,所述模型参数包括:探测方朝各应答目标发出询问信息的时刻与接收到各应答目标反馈的应答信息的时刻的时间差,以及各应答目标的应答延时时长;模型计算单元,用于从所述参数获取单元中提取模型参数,将提取的模型参数代入目标距离计算模型中进行计算,得到应答目标的距离。
46.进一步的,所述参数获取单元包括:计时器,用于记录探测方朝各应答目标发出询问信息的时刻与接收到各应答目标反馈的应答信息的时刻的时间差;应答延时提取子单元,用于从所述解密及译码模块中提取出各应答目标的应答延时时长。
47.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
