用于改进crashview系统读取交通事故现场数据的方法
技术领域
1.本发明涉及道路交通安全领域,更具体地说,涉及一种用于改进 crashview系统读取交通事故现场数据的方法。
背景技术:
2.在道路交通事故的后续处理中,车辆速度是分析交通事故过程、认定事故事实、厘定事故原因的重要因素。然而由于事故发生过程的不可逆性,事故现场环境的开放性,事故的突发性,会导致车速计算的不准确性,进而影响对整个事故过程的分析。crashview系统针对上述问题,结合我国道路交通环境,切实提供了一系列解决车速分析与计算的算法与模型,使得一线事故鉴定人员能迅速入门使用,直观感受事故过程,合理判定事故责任。目前已经是国内事故类型覆盖最全面,计算效率最高的符合gb/t 33195—2016 标准的事故仿真再现软件。
3.最新版本的crashview系统提供了易于上手的向导式参数输入界面,使用者只需将事故现场勘察得到并经过坐标转换的参数输入对应位置即可完成车速计算与仿真再现。然而由于事故现场图对事故元素的定位方式与crashview 系统不同,位置参数无法直接从事故现场图中获取,加之事故鉴定人员在工作经验,对系统的熟练程度以及计算能力等方面的差异,导致其在进行坐标转换时难度较大甚至出现计算错误,很大程度上降低了crashview系统的使用效率以及可靠性。
技术实现要素:
4.本发明要解决的技术问题在于,提供一种用于改进crashview系统读取交通事故现场数据的方法,解决了现有的道路交通事故现场勘察信息与 crashview系统进行车速计算所需参数不匹配以及事故现场勘察流程导向性不足等问题,提高了crashview系统的实用性与可靠性。
5.本发明解决其技术问题所采用的技术方案是:构造一种用于改进 crashview系统读取交通事故现场数据的方法,包括以下步骤:
6.基于crashview系统的向导式事故现场勘查流程,完成事故现场各个事故元素位置定位;
7.确定基于crashview系统的事故现场图中各元素坐标值以及其他必要参数值;
8.向导式的事故现场勘察流程为:
9.(1)确定道路类型,事故车辆类型,轮距轴距以及车流方向;
10.(2)确定基准点、基准线;
11.(3)确定碰撞点以及停止点,按综合定位法对这两点进行定位,综合定位法为测量碰撞点到基准点以及基准线的距离,并测量停止点到碰撞点以及基准线的距离;
12.(4)测量事故车辆某一车轮到基准点以及基准线的距离,并测量该车车身与基准线的夹角;或者测量事故车辆任意2个车轮到基准点以及基准线的距离;
13.(5)完成某一待测点定位后,将其作为新的基准点,顺着车流方向,定位下一点,以此类推,直到完成所有需要的待测点定位。
14.按上述方案,东西向道路x-y坐标系中各元素的坐标计算表达式为:
15.碰撞点a的坐标为停止点z的坐标为
16.式中,l
az
为碰撞点a与停止点z的距离,m;sa为碰撞点a到基准线l的距离,m;sz为停止点z到基准线l的距离,m;
17.其余事故元素坐标点计算公式为:
[0018][0019]
式中,xm为m横坐标,l
mn
为点m与点n的距离,m;sm为m到基准线l的距离,m;sn为n到基准线l的距离,m;
[0020]
基准线位于道路北侧的东西向道路x-y坐标系中各元素的坐标计算表达式为:
[0021][0022]
按上述方案,南北向道路x-y坐标系中各元素的坐标计算表达式为:
[0023]
碰撞点a的坐标为停止点z的坐标为
[0024]
其余事故元素坐标点计算公式为:
[0025][0026]
基准线位于道路西侧时,坐标转换公式如下:
[0027][0028]
按上述方案,十字型道路x-y坐标系中各元素的坐标计算表达式为:
[0029]
(1)基准线位于东西向道路南侧,任意一点n的坐标计算公式为:
[0030][0031]
式中,l
no
为点n到基准点的距离,m;d1为基准点到到基准线1的距离, m;sn为n到基准线1的距离,m;
[0032]
(2)基准线位于东西向道路北侧,任意一点n的坐标计算公式为:
[0033][0034]
式中,d2为基准点到到基准线2的距离,m;sn为n到基准线2的距离, m;
[0035]
(3)基准线位于南北向道路东侧,任意一点n的坐标计算公式为:
[0036][0037]
式中,d3为基准点到到基准线3的距离,m;sn为n到基准线3的距离, m;
[0038]
(4)基准线位于南北向道路西侧,任意一点n的坐标计算公式为:
[0039][0040]
式中,d4为基准点到到基准线4的距离,m;sn为n到基准线4的距离, m。
[0041]
按上述方案,四轮汽车左前轮坐标及车身与x轴夹角计算表达式为:
[0042]
(1)已知事故车辆左前轮坐标(x
fl
,y
fl
)和车身与x轴夹角α;
[0043]
此条件即为crashview系统进行车速计算时的输入参数;
[0044]
(2)已知事故车辆右前轮坐标(x
fr
,y
fr
)和车身与x轴夹角α:
[0045]
x
fl
=x
fr-w
t
sinα
[0046]yfl
=y
fr
w
t
cosα
[0047]
(3)已知事故车辆左后轮坐标(x
bl
,y
bl
)和车身与x轴夹角α
[0048]
x
fl
=x
bl
wbcosα
[0049]yfl
=y
bl
wbsinα
[0050]
(4)已知事故车辆右后轮坐标(x
br
,y
br
)和车身与x轴夹角α;
[0051]
x
fl
=x
br-w
t
sinα wbcosα
[0052]yfl
=y
br
w
t
cosα wbsinα
[0053]
(5)已知事故车辆左前轮坐标(x
fl
,y
fl
)和右前轮坐标(x
fr
,y
fr
);
[0054][0055]
(6)已知事故车辆左前轮坐标(x
fl
,y
fl
)和右后轮坐标(x
br
,y
br
);
[0056][0057]
(7)已知事故车辆左前轮坐标(x
fl
,y
fl
)和左后轮坐标(x
bl
,y
bl
);
[0058][0059]
(8)已知事故车辆右前轮坐标(x
fr
,y
fr
)和右后轮坐标(x
br
,y
br
);
[0060]
x
fl
=x
fr-w
t
sinα
[0061]yfl
=y
fr
w
t
cosα
[0062][0063]
(9)已知事故车辆右前轮坐标(x
fr
,y
fr
)和左后轮坐标(x
bl
,y
bl
);
[0064]
x
fl
=x
bl
wbcosα
[0065]yfl
=y
bl
wbsinα
[0066][0067]
(10)已知事故车辆左后轮坐标(x
bl
,y
bl
)和右后轮坐标(x
br
,y
br
);
[0068]
x
fl
=x
bl
w
b cosα
[0069]yfl
=y
bl
w
b sinα
[0070][0071]
按上述方案,三轮车的坐垫中心坐标及车身与x轴的夹角计算表达式为: (1)已知事故三轮车转向轮坐标(x
tn
,y
tn
)和车身与x轴夹角α;
[0072][0073][0074]
(2)已知事故三轮车左后轮坐标(x
lb
,y
lb
)和车身与x轴夹角α;
[0075][0076][0077]
(3)已知事故三轮车右后轮坐标(x
rb
,y
rb
)和车身与x轴夹角α;
[0078][0079][0080]
(4)已知三轮车转向轮坐标(x
tn
,y
tn
)和左后轮坐标(x
lb
,y
lb
);
[0081][0082][0083][0084]
(5)已知三轮车转向轮坐标(x
tn
,y
tn
)和右后轮坐标(x
rb
,y
rb
);
[0085][0086][0087][0088]
(6)已知三轮车左后轮坐标(x
lb
,y
lb
)和右后轮坐标(x
rb
,y
rb
);
[0089][0090][0091][0092]
按上述方案,二轮车的坐垫中心坐标及车身与x轴的夹角计算表达式为:
[0093]
(1)已知事故二轮车前轮坐标(x
qf
,y
qf
)和车身与x轴夹角α;
[0094][0095][0096]
(2)已知事故二轮车后轮坐标(x
hb
,y
hb
)和车身与x轴夹角α;
[0097][0098][0099]
(3)已知二轮车前后两个车轮的坐标(x
qf
,y
qf
),(x
hb
,y
hb
)
[0100][0101][0102][0103]
实施本发明的用于改进crashview系统读取交通事故现场数据的方法,具有以下有益效果:
[0104]
本发明提供的一种用于改进crashview系统读取交通事故现场数据的方法,建立了以crashview系统x-y坐标系为基准的东西向直(弯)道路,南北向直(弯)道路,十字形道路,东西向直弯组合道路,南北向直弯组合道路, t型路口等常见道路类型下的坐标转换计算模型,实现了事故现场坐标与 crashview系统坐标的自动转换;同时针对事故现场勘察中无法直接定位 crashview系统计算所需参数的问题,建立了四轮汽车、三轮车和二轮车内部坐标互相转换算法模型,极大程度地减少了参数输入量、降低了获取难度;通过对事故
现场勘察标准以及一线勘察人员常用的事故元素定位方式研究,结合 crashview系统坐标系、定位方式以及计算所需的参数,设计了一套适用于 crashview系统的标准化事故现场勘察流程,实现了事故现场位置信息向 crashview系统的无缝衔接,进一步提高了crashview系统的使用效率。
附图说明
[0105]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0106]
图1是东西向事故现场x-y坐标系示意图;
[0107]
图2是南北向事故现场x-y坐标系示意图;
[0108]
图3是十字型道路事故现场x-y坐标系示意图;
[0109]
图4是简化的四轮汽车结构示意图;
[0110]
图5是简化的三轮车结构示意图;
[0111]
图6是简化的二轮车结构示意图;
[0112]
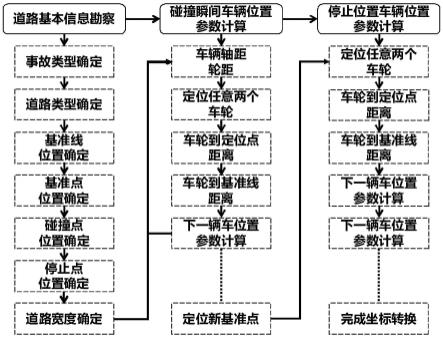
图7是基于crashview系统的事故现场勘察流程图。
具体实施方式
[0113]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
[0114]
本发明提供的一种用于改进crashview系统读取交通事故现场数据的方法,包括以下步骤:
[0115]
步骤1,确定x-y坐标系位置,根据crashview系统坐标系建立形式,x 轴正方向始终为计算机屏幕右方,y轴正方向始终为计算机屏幕上方,原点为道路中心位置,即整个事故发生主体位置的中心,在综合定位定位绘制的事故现场图中表现为碰撞点与最终停止点位置的中心,确定该位置后即可完成x-y 坐标系构建。
[0116]
步骤2,确定东西向道路x-y坐标系中各元素的坐标,具体地:
[0117]
如图1所示,图1中x轴位于东西向道路中央隔离带中心,与道路边缘线平行,方向为正东。y轴位于碰撞点a与停止点z连线l
az
的中点,与道路边缘线垂直,方向为正北。据此可求得碰撞点a的横坐标xa:
[0118][0119]
式(1)中,l
az
为碰撞点a与停止点z的距离,m;sa为碰撞点a到基准线l 的距离,m;sz为停止点z到基准线l的距离,m。
[0120]
碰撞点a的纵坐标ya:
[0121][0122]
式(2)中,d为道路宽度,m。
[0123]
同理可求得停止点z的横坐标xz:
[0124][0125]
停止点z的纵坐标yz:
[0126][0127]
进一步可求得基准点m的坐标:
[0128][0129]
式5中,l
ma
为碰撞点a与基准点m的距离,m;sm为基准点m到基准线l 的距离。
[0130]
由此推广到在该坐标系下其余事故元素坐标点计算的一般情况。假设基准点m坐标已知,根据m点计算n点坐标,则有以下公式:
[0131][0132]
式6中,xm为m横坐标,l
mn
为点m与点n的距离,m;sm为m到基准线l的距离,m;sn为n到基准线l的距离,m。
[0133]
式6为东西向道路,基准线位于道路南侧的事故元素坐标计算公式,当基准线位于道路北侧时,需将横纵坐标进行相应变换,变换后的公式如下:
[0134][0135]
步骤3,确定南北向道路x-y坐标系中各元素的坐标,具体地:
[0136]
与东西向道路事故元素坐标值转换算法类似,将图1坐标轴顺时针旋转 90
°
得到南北向道路事故现场x-y轴坐标系,如图2所示。
[0137]
图2中y轴位于南北向道路中央隔离带中心,与道路边缘线平行,方向为正北东。x轴位于碰撞点a与停止点z连线l
az
的中点,与道路边缘线垂直,方向为正东。据此可求得碰撞点a的横坐标xa:
[0138][0139]
碰撞点a的纵坐标ya:
[0140][0141]
同理可求得停止点z的横坐标xz:
[0142][0143]
停止点z的纵坐标yz:
[0144][0145]
因此,转换后的点在crashview系统的x-y坐标系中,碰撞点a的坐标为停止点z的坐标为
[0146]
进一步可求得基准点m的坐标:
[0147][0148]
由此推广到在该坐标系下其余事故元素坐标点计算的一般情况。假设基准点m坐标已知,根据m点计算n点坐标,则有以下公式:
[0149]
[0150]
同理,当基准线位于道路西侧时,坐标转换公式如下
[0151][0152]
步骤4,确定十字型道路x-y坐标系中各元素的坐标,具体地:
[0153]
由于crashview系统中十字型道路坐标原点位置已经固定于十字路口中心点,且此点在事故勘察现场较为容易选取以及定位,因此将其作为基准点进行坐标转换计算,此时基准点坐标为(0,0),根据基准线选择不同,可分为基准线位于道路东南西北4个方向的4种情形,如图3所示。
[0154]
(1)基准线位于东西向道路南侧,图3中基准线1所示位置:
[0155]
此情况与东西向类型道路,基准线位于道路南侧坐标转换算法基本一致,则任意一点n的坐标计算公式为:
[0156][0157]
式15中,l
no
为点n到基准点的距离,m;d1为基准点到到基准线1的距离, m;sn为n到基准线1的距离,m。
[0158]
(2)基准线位于东西向道路北侧,图3中基准线2所示位置:
[0159]
此情况与东西向类型道路,基准线位于道路北侧坐标转换算法基本一致,则任意一点n的坐标计算公式为:
[0160][0161]
式16中,d2为基准点到到基准线2的距离,m;sn为n到基准线2的距离, m。
[0162]
(3)基准线位于南北向道路东侧,图3中基准线3所示位置:
[0163]
此情况与南北向类型道路,基准线位于道路东侧坐标转换算法基本一致,则任意一点n的坐标计算公式为:
[0164][0165]
式17中,d3为基准点到到基准线3的距离,m;sn为n到基准线3的距离, m。
[0166]
(4)基准线位于南北向道路西侧,图3中基准线4所示位置:
[0167]
此情况与南北向类型道路,基准线位于道路西侧坐标转换算法基本一致,则任意一点n的坐标计算公式为:
[0168][0169]
式18中,d4为基准点到到基准线4的距离,m;sn为n到基准线4的距离, m。
[0170]
步骤5,确定四轮汽车左前轮坐标及车身与x轴夹角算法,具体地:
[0171]
crashview系统将四轮汽车视为规则的矩形,矩形的长边为车辆轴距,短边为车辆轮距,如图4所示。图中,(x
fl
,y
fl
),(x
fr
,y
fr
),(x
bl
,y
bl
),(x
br
,y
br
)分别为事故车辆左前轮,右前轮,左后轮,右后轮坐标,α为事故车辆车身与x轴夹角,
°
;w
t
为事故车辆轮距,m;wb为事故车辆轴距,m。根据几何学原理以及车辆实际情况(不考虑车辆翻滚)并考虑到交警惯用的定位方法,欲确保车辆定位的唯一性,必须已知车辆任意一个车轮的坐标和车身与x轴夹角或已知车辆任意至少两个车轮的坐标。
[0172]
(1)已知事故车辆左前轮坐标(x
fl
,y
fl
)和车身与x轴夹角α。
[0173]
此条件即为crashview系统进行车速计算时的输入参数。
[0174]
(2)已知事故车辆右前轮坐标(x
fr
,y
fr
)和车身与x轴夹角α。
[0175]
根据三角函数,易得到左前轮坐标(x
fl
,y
fl
)计算公式为:
[0176][0177]
(3)已知事故车辆左后轮坐标(x
bl
,y
bl
)和车身与x轴夹角α。
[0178]
同理可得左前轮坐标(x
fl
,y
fl
)计算公式为:
[0179][0180]
(4)已知事故车辆右后轮坐标(x
br
,y
br
)和车身与x轴夹角α。
[0181]
同理可得左前轮坐标(x
fl
,y
fl
)计算公式为:
[0182][0183]
(5)已知事故车辆左前轮坐标(x
fl
,y
fl
)和右前轮坐标(x
fr
,y
fr
)。
[0184]
通过三角函数计算,易得:
[0185][0186]
(6)已知事故车辆左前轮坐标(x
fl
,y
fl
)和右后轮坐标(x
br
,y
br
)。
[0187]
根据图4,可得到以下公式:
[0188][0189]
可求得车身与x轴夹角α:
[0190][0191]
(7)已知事故车辆左前轮坐标(x
fl
,y
fl
)和左后轮坐标(x
bl
,y
bl
)。
[0192]
左前轮坐标已知,需求出车身与x轴夹角α。根据图4,通过三角函数计算,易得:
[0193][0194]
(8)已知事故车辆右前轮坐标(x
fr
,y
fr
)和右后轮坐标(x
br
,y
br
)。
[0195]
由此已知条件,需同时求得事故车辆左前轮坐标(x
fl
,y
fl
)以及车身与x轴夹角α。根据图4,通过三角函数计算,易得:
[0196][0197][0198]
(9)已知事故车辆右前轮坐标(x
fr
,y
fr
)和左后轮坐标(x
bl
,y
bl
)。
[0199]
由此已知条件,需同时求得事故车辆左前轮坐标(x
fl
,y
fl
)以及车身与x轴夹角α。
[0200]
根据图4,易得
[0201][0202]
根据图4,可得到以下公式:
[0203][0204]
可求得车身与x轴夹角α:
[0205][0206]
(10)已知事故车辆左后轮坐标(x
bl
,y
bl
)和右后轮坐标(x
br
,y
br
)。
[0207]
由此已知条件,需同时求得事故车辆左前轮坐标(x
fl
,y
fl
)以及车身与x轴夹角α。根据图4,通过三角函数计算,易得:
[0208][0209][0210]
步骤6,确定三轮车的坐垫中心坐标及车身与x轴的夹角算法,具体地:
[0211]
crashview系统将三轮车视为一个“t”型结构,坐垫中心位置近似位于通过转向轮与后轴垂直线段的中点p处,如图5所示。图中,(x
tn
,y
tn
),(x
lb
,y
lb
),(x
rb
,y
rb
), (x
zd
,y
zd
),(x
ct
,y
ct
)分别为事故三轮车转向轮,左后轮,右后轮,左右后轮中点,坐垫中心坐标,α为事故车辆车身与x轴夹角,
°
;wk为事故车辆轮距,m;wf为事故车辆轴距,m。
[0212]
与四轮汽车现场测量情况类似,根据几何学原理以及车辆实际情况(不考虑车辆翻滚)并考虑到交警惯用的定位方法,欲确保三轮车定位的唯一性,同时能根据定位参数获得crashview系统计算所需参数,必须已知三轮车任意一个车轮坐标和车身与x轴夹角或已知三轮车任意两个车轮坐标。
[0213]
(1)已知事故三轮车转向轮坐标(x
tn
,y
tn
)和车身与x轴夹角α。
[0214]
根据图5,易得
[0215][0216][0217]
(2)已知事故三轮车左后轮坐标(x
lb
,y
lb
)和车身与x轴夹角α。
[0218]
根据图5,易得
[0219][0220]
由式35可得
[0221][0222][0223]
(3)已知事故三轮车右后轮坐标(x
rb
,y
rb
)和车身与x轴夹角α。
[0224]
根据图5,易得
[0225][0226]
由式38可得
[0227][0228][0229]
(4)已知三轮车转向轮坐标(x
tn
,y
tn
)和左后轮坐标(x
lb
,y
lb
)。
[0230]
根据图5,通过三角函数计算,可得下列公式:
[0231]
[0232]
由式41可推出,该条件下,三轮车坐垫中心位置坐标为
[0233][0234][0235]
车身与x轴夹角α为
[0236][0237]
(5)已知三轮车转向轮坐标(x
tn
,y
tn
)和右后轮坐标(x
rb
,y
rb
)。
[0238]
根据图,通过三角函数计算,可得下列公式:
[0239][0240]
由式45可推出,该条件下,三轮车坐垫中心位置坐标为
[0241][0242][0243]
车身与x轴夹角α为
[0244][0245]
(6)已知三轮车左后轮坐标(x
lb
,y
lb
)和右后轮坐标(x
rb
,y
rb
)。
[0246]
根据图,通过三角函数计算,可得下列公式:
[0247][0248]
由式49可推出,该条件下,三轮车坐垫中心位置坐标为
[0249][0250][0251]
车身与x轴夹角α为
[0252][0253]
步骤7,确定二轮车的坐垫中心坐标及车身与x轴的夹角算法,具体地:
[0254]
crashview系统将二轮车视为一条有方向的线段,如图6所示。在事故现场测量二轮车前后车轮或者车身角度均较为容易,因此可以通过测量这些参数,进行坐标转换计算,从而确定坐垫中心坐标及车身与x轴的夹角。
[0255]
根据几何学原理以及车辆实际情况(不考虑车辆翻滚)并考虑到交警惯用的定位方法,欲确保二轮车定位的唯一性,同时能根据定位参数获得crashview 系统计算所需参数,必须已知二轮车任意一个车轮坐标和车身与x轴夹角或已知二轮车前后两个车轮坐标。
[0256]
(1)已知事故二轮车前轮坐标(x
qf
,y
qf
)和车身与x轴夹角α。
[0257]
根据图6,易得
[0258][0259][0260]
(2)已知事故二轮车后轮坐标(x
hb
,y
hb
)和车身与x轴夹角α。
[0261]
根据图6,易得
[0262][0263][0264]
(3)已知二轮车前后两个车轮的坐标(x
qf
,y
qf
),(x
hb
,y
hb
)
[0265]
根据图6,通过三角函数计算,二轮车坐垫中心坐标(x
tc
,y
tc
)为
[0266][0267]
二轮车车身与x轴夹角α为
[0268][0269]
步骤8,基于crashview系统的向导式事故现场勘察流程算法确定,如图7所示,具体地:
[0270]
(1)确定道路类型,事故车辆类型,轮距轴距以及车流方向;
[0271]
(2)确定基准点、基准线;
[0272]
(3)确定碰撞点以及停止点,按综合定位法(测量碰撞点到基准点以及基准线的距离,并测量停止点到碰撞点以及基准线的距离)对这两点进行定位;
[0273]
(4)测量事故车辆某一车轮到基准点(或者已定位的某点)以及基准线的距离,并测量该车车身与基准线的夹角。或者测量事故车辆任意2个车轮到基准点(或者已定位的某点)以及基准线的距离。
[0274]
(5)完成某一待测点定位后,将其作为新的基准点,顺着车流方向,定位下一点,以此类推,直到完成所有需要的待测点定位。
[0275]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。